Fundamentals of Maxwell's theory for electromagnetic field
Vortex electric field
From Faraday's Law ξ=dФ/dt follows that any a change in the flux of magnetic induction coupled to the circuit leads to the emergence of an electromotive force of induction and, as a result, an induction current appears. Therefore, the occurrence of emf. electromagnetic induction is also possible in a fixed circuit located in an alternating magnetic field. However, emf. in any circuit occurs only when external forces act on current carriers in it - forces of non-electrostatic origin (see § 97). Therefore, the question arises about the nature of extraneous forces in this case.
Experience shows that these extraneous forces are not associated with either thermal or chemical processes in the circuit; their occurrence also cannot be explained by Lorentz forces, since they do not act on immovable charges. Maxwell hypothesized that any alternating magnetic field excites an electric field in the surrounding space, which
and is the cause of the induction current in the circuit. According to Maxwell's ideas, the circuit in which the emf appears plays a secondary role, being a kind of only "device" that detects this field.
first equation Maxwell argues that changes in the electric field generate a vortex magnetic field.
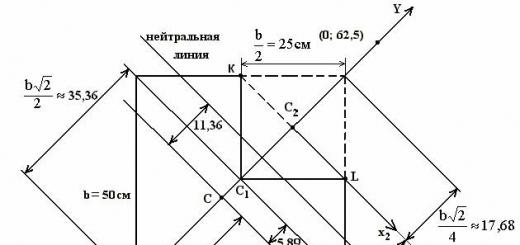
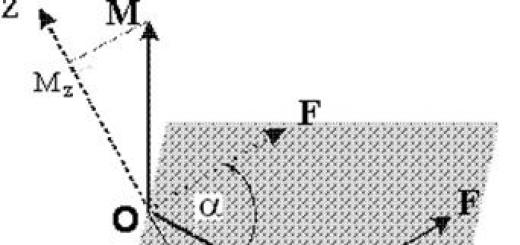
Second equation Maxwell expresses the law electromagnetic induction Faraday: The EMF in any closed loop is equal to the rate of change (i.e. time derivative) magnetic flux. But the EMF is equal to the tangential component of the electric field strength vector E, multiplied by the length of the circuit. To go to the rotor, as in the first Maxwell equation, it is enough to divide the EMF by the area of \u200b\u200bthe contour, and let the latter go to zero, i.e., take a small contour covering the considered point in space (Fig. 9, c). Then on the right side of the equation there will no longer be a flux, but a magnetic induction, since the flux is equal to the induction multiplied by the area of \u200b\u200bthe circuit.
So, we get: rotE = - dB/dt.
Thus, the vortex electric field is generated by changes in the magnetic field, which is shown in Fig. 9c and is represented by the formula just given.
Third and fourth equations Maxwell deal with charges and the fields generated by them. They are based on the Gauss theorem, which states that the flow of the electric induction vector through any closed surface is equal to the charge inside this surface.
A whole science is based on Maxwell's equations - electrodynamics, which allows solving many useful practical problems using strict mathematical methods. It is possible to calculate, for example, the radiation field of various antennas both in free space and near the surface of the Earth or near the body of some aircraft such as aircraft or rockets. Electrodynamics allows you to calculate the design of waveguides and cavity resonators - devices used at very high frequencies of the centimeter and millimeter wave ranges, where conventional transmission lines and oscillatory circuits are no longer suitable. Without electrodynamics, the development of radar, space radio communications, antenna technology, and many other branches of modern radio engineering would be impossible.
Bias current
SHIFT CURRENT, a quantity proportional to the rate of change of an alternating electric field in a dielectric or vacuum. The name "current" is due to the fact that the displacement current, like the conduction current, generates a magnetic field.
When constructing the theory of the electromagnetic field, J.K. Maxwell put forward a hypothesis (subsequently confirmed by experiment) that the magnetic field is created not only by the movement of charges (conduction current, or simply current), but also by any change in time of the electric field.
The concept of displacement current was introduced by Maxwell to establish quantitative relationships between the changing electric field and the resulting magnetic field.
According to Maxwell's theory, in an alternating current circuit containing a capacitor, an alternating electric field in the capacitor at each moment of time creates such a magnetic field as the current (called the displacement current) would create if it flowed between the plates of the capacitor. From this definition it follows that J cm = J(i.e., numerical values the conduction current density and the displacement current density are equal), and, therefore, the conduction current density lines inside the conductor continuously change into the displacement current density lines between the capacitor plates. Bias current density j cm characterizes the rate of change of electrical induction D in time:
J cm = + ?D/?t.
The bias current does not generate Joule heat, its main physical property- the ability to create a magnetic field in the surrounding space.
The vortex magnetic field is created by the total current, the density of which is j, is equal to the sum of the conduction current density and the bias current?D/?t. That is why for the value? D /? t the name current was introduced.
Harmonic oscillator called a system that oscillates, described by an expression of the form d 2 s / dt 2 + ω 0 2 s \u003d 0 or
where the two dots above mean twofold differentiation with respect to time. The oscillations of the harmonic oscillator are important example periodic motion and serve as an exact or approximate model in many problems of classical and quantum physics. Examples of a harmonic oscillator are spring, physical, and mathematical pendulum and, an oscillatory circuit (for currents and voltages so small that the elements of the circuit could be considered linear).
Along with progressive and rotational movements bodies in mechanics are of considerable interest and oscillatory movements. Mechanical vibrations are called movements of bodies that repeat exactly (or approximately) at regular intervals. The law of motion of an oscillating body is given by some periodic function of time x = f (t). Graphic image This function gives a visual representation of the course of the oscillatory process in time.
Examples of simple oscillatory systems are a load on a spring or a mathematical pendulum (Fig. 2.1.1).
Mechanical oscillations, like oscillatory processes of any other physical nature, can be free And forced. Free vibrations are made under the influence internal forces system after the system has been brought out of equilibrium. The oscillations of a weight on a spring or the oscillations of a pendulum are free oscillations. vibrations under the action external periodically changing forces are called forced The simplest type of oscillatory process are simple harmonic vibrations , which are described by the equation
Oscillation frequency f shows how many vibrations are made in 1 s. Frequency unit - hertz(Hz). Oscillation frequency f is related to the cyclic frequency ω and the oscillation period T ratios:
gives the dependence of the fluctuating quantity S from time t; this is the equation of free harmonic oscillations in explicit form. However, the equation of oscillations is usually understood as a different record of this equation, in differential form. For definiteness, we take equation (1) in the form
Differentiate it twice with respect to time:
It can be seen that the following relation holds:
which is called the equation of free harmonic oscillations (in differential form). Equation (1) is a solution to differential equation (2). Since equation (2) - differential equation second order, two initial conditions are needed to obtain complete solution(that is, the definitions of the constants included in equation (1) A and j0); e.g. position and speed oscillatory system at t = 0.
Addition of harmonic oscillations of the same direction and the same frequency. beats
Let two harmonic oscillations of the same direction and the same frequency take place
The equation of the resulting oscillation will have the form
We verify this by adding the equations of system (4.1)
Applying the sum cosine theorem and making algebraic transformations:
One can find such quantities A and φ0 that satisfy the equations
Considering (4.3) as two equations with two unknowns A and φ0, we find by squaring and adding them, and then dividing the second by the first:
Substituting (4.3) into (4.2), we get:
Or finally, using the sum cosine theorem, we have:
The body, participating in two harmonic oscillations of the same direction and the same frequency, also performs a harmonic oscillation in the same direction and with the same frequency as the summed oscillations. The amplitude of the resulting oscillation depends on the phase difference (φ2-φ1) of the smoothed oscillations.
Depending on the phase difference (φ2-φ1):
1) (φ2-φ1) = ±2mπ (m=0, 1, 2, ...), then A= A1+A2, i.e. the amplitude of the resulting oscillation A is equal to the sum of the amplitudes of the added oscillations;
2) (φ2-φ1) = ±(2m+1)π (m=0, 1, 2, ...), then A= |A1-A2|, i.e. the amplitude of the resulting oscillation is equal to the difference in the amplitudes of the added oscillations
Periodic changes in the amplitude of oscillations that occur when two harmonic oscillations with close frequencies are added are called beats.
Let two oscillations differ little in frequency. Then the amplitudes of the added oscillations are equal to A, and the frequencies are equal to ω and ω + Δω, and Δω is much less than ω. We choose the reference point so that the initial phases of both oscillations are equal to zero:
Let's solve the system
System solution:
The resulting oscillation can be considered as harmonic with frequency ω, amplitude A, which varies according to the following periodic law:
The frequency of change of A is twice the frequency of change of the cosine. The beat frequency is equal to the difference between the frequencies of the added oscillations: ωb = Δω
Beat period:
Determination of the tone frequency (the sound of a certain beat height by the reference and measured vibrations is the most widely used method for comparing the measured value with the reference. The beat method is used to tune musical instruments, analyze hearing, etc.
Similar information.
When reading this section, keep in mind that fluctuations of different physical nature are described from a unified mathematical standpoint. Here it is necessary to clearly understand such concepts as harmonic oscillation, phase, phase difference, amplitude, frequency, oscillation period.
It must be borne in mind that in any real oscillatory system there are resistances of the medium, i.e. oscillations will be damped. To characterize the damping of oscillations, the damping coefficient and the logarithmic damping decrement are introduced.
If vibrations are made under the action of an external, periodically changing force, then such vibrations are called forced. They will be unstoppable. The amplitude of forced oscillations depends on the frequency of the driving force. When the frequency of forced oscillations approaches the frequency of natural oscillations, the amplitude of forced oscillations increases sharply. This phenomenon is called resonance.
Turning to the study of electromagnetic waves, you need to clearly understand thatelectromagnetic waveis an electromagnetic field propagating in space. The simplest system emitting electromagnetic waves, is an electric dipole. If the dipole performs harmonic oscillations, then it radiates a monochromatic wave.
Formula Table: Oscillations and Waves
|
Physical laws, formulas, variables |
Oscillation and wave formulas |
||||||
|
Harmonic vibration equation: where x is the displacement (deviation) of the oscillating value from the equilibrium position; A - amplitude; ω - circular (cyclic) frequency; α - initial phase; (ωt+α) - phase. |
|||||||
|
Relationship between period and circular frequency: |
|||||||
|
Frequency: |
|||||||
|
Relation of circular frequency to frequency: |
|||||||
|
Periods of natural oscillations 1) spring pendulum: where k is the stiffness of the spring; 2) mathematical pendulum: where l is the length of the pendulum, g - free fall acceleration; 3) oscillatory circuit: where L is the inductance of the circuit, C is the capacitance of the capacitor. |
|
||||||
|
Frequency of natural vibrations: |
|||||||
|
Addition of oscillations of the same frequency and direction: 1) the amplitude of the resulting oscillation where A 1 and A 2 are the amplitudes of the component oscillations, α 1 and α 2 - the initial phase of the components of the oscillations; 2) the initial phase of the resulting oscillation |
|
||||||
|
Damped oscillation equation: e \u003d 2.71 ... - the base of natural logarithms. |
|
||||||
|
Amplitude of damped oscillations: where A 0 - amplitude at the initial time; β - damping factor; |
|
||||||
|
Attenuation factor: oscillating body where r is the coefficient of resistance of the medium, m - body weight; oscillatory circuit where R is active resistance, L is the inductance of the circuit. |
|||||||
|
Frequency of damped oscillations ω: |
|
||||||
|
Period of damped oscillations T: |
|
||||||
|
Logarithmic damping decrement: |




fluctuations called movements or processes that are characterized by a certain repetition in time. Fluctuations are widespread in the surrounding world and can have a very different nature. These can be mechanical (pendulum), electromagnetic (oscillatory circuit) and other types of oscillations.
free, or own oscillations are called oscillations that occur in a system left to itself, after it has been brought out of equilibrium by an external influence. An example is the oscillation of a ball suspended on a thread.
special role in oscillatory processes has the simplest form of oscillation - harmonic vibrations. Harmonic vibrations underlie a unified approach to the study of vibrations different nature, since the oscillations encountered in nature and technology are often close to harmonic, and periodic processes of a different form can be represented as a superposition of harmonic oscillations.
Harmonic vibrations such oscillations are called, in which the oscillating value varies with time according to the law sinus or cosine.
Harmonic vibration equationlooks like:
where A - oscillation amplitude (the value of the greatest deviation of the system from the equilibrium position); -circular (cyclic) frequency. Periodically changing cosine argument - called oscillation phase . The oscillation phase determines the displacement of the oscillating quantity from the equilibrium position at a given time t. The constant φ is the value of the phase at time t = 0 and is called the initial phase of the oscillation . The value of the initial phase is determined by the choice of the reference point. The x value can take values ranging from -A to +A.
The time interval T, after which certain states of the oscillatory system are repeated, called the period of oscillation . Cosine is a periodic function with a period of 2π, therefore, over a period of time T, after which the oscillation phase will receive an increment equal to 2π, the state of the system performing harmonic oscillations will repeat. This period of time T is called the period of harmonic oscillations.
The period of harmonic oscillations is : T = 2π/ .
The number of oscillations per unit time is called oscillation frequency
ν.
Frequency of harmonic vibrations
is equal to: ν = 1/T. Frequency unit hertz(Hz) - one oscillation per second.
Circular frequency = 2π/T = 2πν gives the number of oscillations in 2π seconds.
Graphically, harmonic oscillations can be depicted as a dependence of x on t (Fig. 1.1.A), and rotating amplitude method (vector diagram method)(Fig.1.1.B) .
The rotating amplitude method allows you to visualize all the parameters included in the equation of harmonic oscillations. Indeed, if the amplitude vector BUT located at an angle φ to the x-axis (see Figure 1.1. B), then its projection on the x-axis will be equal to: x = Acos(φ). The angle φ is the initial phase. If the vector BUT put into rotation with angular velocity, equal to the circular frequency of oscillations, then the projection of the end of the vector will move along the x-axis and take values ranging from -A to +A, and the coordinate of this projection will change over time according to the law:
.
Thus, the length of the vector is equal to the amplitude of the harmonic oscillation, the direction of the vector at the initial moment forms an angle with the x axis equal to the initial phase of the oscillation φ, and the change in the direction angle with time is equal to the phase of the harmonic oscillations. The time for which the amplitude vector makes one complete revolution is equal to the period T of harmonic oscillations. The number of revolutions of the vector per second is equal to the oscillation frequency ν.
We considered several physically completely different systems, and made sure that the equations of motion are reduced to the same form
Differences between physical systems manifest themselves only in different definitions of the quantity and in various physical sense variable x: it can be a coordinate, an angle, a charge, a current, etc. Note that in this case, as follows from the very structure of equation (1.18), the quantity always has the dimension of inverse time.
Equation (1.18) describes the so-called harmonic vibrations.
The equation of harmonic oscillations (1.18) is a second-order linear differential equation (since it contains the second derivative of the variable x). The linearity of the equation means that
if any function x(t) is a solution to this equation, then the function Cx(t) will also be his solution ( C is an arbitrary constant);
if functions x 1 (t) And x 2 (t) are solutions of this equation, then their sum x 1 (t) + x 2 (t) will also be a solution to the same equation.
A mathematical theorem is also proved, according to which a second-order equation has two independent solutions. All other solutions, according to the properties of linearity, can be obtained as their linear combinations. It is easy to check by direct differentiation that the independent functions and satisfy equation (1.18). Means, common decision this equation has the form:
where C1,C2 are arbitrary constants. This solution can also be presented in another form. We introduce the quantity
|
|
and define the angle as:
|
|

Then the general solution (1.19) is written as
According to the trigonometry formulas, the expression in brackets is
We finally arrive at general solution of the equation of harmonic oscillations as:
Non-negative value A called oscillation amplitude, - the initial phase of the oscillation. The whole cosine argument - the combination - is called oscillation phase.
Expressions (1.19) and (1.23) are perfectly equivalent, so we can use either of them for reasons of simplicity. Both solutions are periodic functions of time. Indeed, the sine and cosine are periodic with a period . Therefore, various states of a system that performs harmonic oscillations are repeated after a period of time t*, for which the oscillation phase receives an increment that is a multiple of :
Hence it follows that
The least of these times
called period of oscillation (Fig. 1.8), a - his circular (cyclic) frequency.
Rice. 1.8.
They also use frequency hesitation
|
|
Accordingly, the circular frequency is equal to the number of oscillations per seconds.
So, if the system at time t characterized by the value of the variable x(t), then, the same value, the variable will have after a period of time (Fig. 1.9), that is
![]()
The same value, of course, will be repeated after a while. 2T, ZT etc.

Rice. 1.9. Oscillation period
The general solution includes two arbitrary constants ( C 1 , C 2 or A, a), the values of which should be determined by two initial conditions. Usually (though not necessarily) their role is played by initial values variable x(0) and its derivative.
Let's take an example. Let the solution (1.19) of the equation of harmonic oscillations describe the motion of a spring pendulum. The values of arbitrary constants depend on the way in which we brought the pendulum out of equilibrium. For example, we pulled the spring to a distance and released the ball without initial velocity. In this case

Substituting t = 0 in (1.19), we find the value of the constant From 2
![]()
The solution thus looks like:
The speed of the load is found by differentiation with respect to time
![]()
Substituting here t = 0, find the constant From 1:
![]()
Finally
![]()
Comparing with (1.23), we find that is the oscillation amplitude, and its initial phase is equal to zero: .
We now bring the pendulum out of equilibrium in another way. Let's hit the load, so that it acquires an initial speed , but practically does not move during the impact. We then have other initial conditions:

![]()
our solution looks like
![]()
The speed of the load will change according to the law:
![]()
Let's put it here:
![]()
Have mathematical expression. Their properties are characterized by a set trigonometric equations, the complexity of which is determined by the complexity of the oscillatory process itself, the properties of the system and the environment in which they occur, i.e., external factors affecting the oscillatory process.
For example, in mechanics, a harmonic oscillation is a movement that is characterized by:
Rectilinear character;
unevenness;
The movement of a physical body that occurs along a sinusoidal or cosine trajectory, and depends on time.
Based on these properties, we can bring the equation of harmonic oscillations, which has the form:
x \u003d A cos ωt or the form x \u003d A sin ωt, where x is the value of the coordinate, A is the value of the oscillation amplitude, ω is the coefficient.
Such an equation of harmonic oscillations is the main one for all harmonic oscillations that are considered in kinematics and mechanics.
The indicator ωt, which in this formula is under the sign trigonometric function, is called the phase, and it determines the location of the oscillating material point at a given moment in time at a given amplitude. When considering cyclical fluctuations, this indicator is equal to 2l, it shows the amount within the time cycle and is denoted by w. In this case, the equation of harmonic oscillations contains it as an indicator of the magnitude of the cyclic (circular) frequency.
The equation of harmonic oscillations we are considering, as already noted, can take various forms, depending on a number of factors. For example, here is an option. To consider free harmonic oscillations, one should take into account the fact that they are all characterized by damping. This phenomenon manifests itself in different ways: the stopping of a moving body, the cessation of radiation in electrical systems. The simplest example showing a decrease in the vibrational potential is its conversion into thermal energy.
The equation under consideration is: d²s / dt² + 2β x ds / dt + ω²s \u003d 0. In this formula: s is the value of the oscillating quantity that characterizes the properties of a particular system, β is a constant showing the attenuation coefficient, ω is the cyclic frequency.
The use of such a formula allows one to approach the description oscillatory processes in linear systems from a unified point of view, as well as to design and simulate oscillatory processes at the scientific and experimental level.
For example, it is known that final stage their manifestations already cease to be harmonic, that is, the categories of frequency and period for them become simply meaningless and are not reflected in the formula.
The classic way to study harmonic oscillations is In its simplest form, it represents a system that is described by such a differential equation of harmonic oscillations: ds / dt + ω²s = 0. But the variety of oscillatory processes naturally leads to the fact that there is a large number of oscillators. We list their main types:
A spring oscillator is an ordinary load with a certain mass m, which is suspended on an elastic spring. It performs harmonic type, which are described by the formula f = - kx.
Physical oscillator (pendulum) - a rigid body that oscillates around a static axis under the influence of a certain force;
- (almost never occurs in nature). It is an ideal model of a system that includes an oscillating physical body with a certain mass, which is suspended on a rigid weightless thread.