Die Internationale Marineausstellung, die Ende Juni stattfand, brachte viele interessante Neuigkeiten. Darunter waren Berichte über die Entwicklungen russischer Spezialisten auf dem Gebiet des Baus von Tiefseefahrzeugen. Die Website des Fernsehsenders Zvezda hat fünf der interessantesten Forschungs- und Rettungsfahrzeuge für die Tiefsee gesammelt, die verwendet werden Marine Rf. Tiefseefahrzeug "Rus" und seine verbesserte Version "Consul" Das erste in Russland gebaute Tiefsee-Tauchboot der dritten Generation war das Tauchboot Rus. Er hielt lange Zeit den Tauchrekord unter den russischen Fahrzeugen. Er konnte auf 6180 Meter absteigen.Das Gerät gehört der russischen Marine und ist für Forschungs- und Unterwasserarbeiten konzipiert. Er kann mit einem Manipulatorgerät unterwassertechnische Arbeiten ausführen, Unterwasserstrukturen und -objekte inspizieren, bis zu 200 kg schwere Gegenstände zu Boden bringen oder an die Oberfläche heben und sich dabei nicht nur vertikal, sondern auch horizontal mit einer Geschwindigkeit von bis zu 3 Knoten An Bord befinden sich: ein hydroakustischer Komplex mit Antennengeräten, ein spezialisierter Manipulatorkomplex, eine Außenbord-Fernsehkamera in einer robusten Box und eine Sound-Unterwasser-Kommunikationsstation. Das Gerät ist mit einem zuverlässigen Sicherheitssystem ausgestattet. Zum ersten Mal auf der Welt ist vorgesehen, den unteren Teil des Apparats zu schießen, falls er im Notfall am Schlick oder Boden feststeckt.Russische Spezialisten haben eine modernisierte Version des Apparats entwickelt, die den Namen "Consul" erhielt die Worte "Sulfidknollen". Obwohl das Gerät in seinen Hauptmerkmalen dem Bathyscaphe des Rus-Projekts ähnelt, ist es für die Durchführung geologischer und geophysikalischer Untersuchungen des Meeresschelfs bestimmt. "Consul" 14. Mai 2011 konnte bis zu einer Tiefe von 6270 m sinken. Bathyscaphes "Mir-1" und "Mir-2" Zwei russische bemannte Tiefsee-Forschungsfahrzeuge haben einen großen Beitrag zur Erforschung der Weltmeere und des Baikalsees geleistet. Bathyscaphes können bis zu 6 km tauchen.Derzeit ist der Mir-1-Apparat im Kaliningrader Museum des Weltozeans ausgestellt, und Mir-2 basiert an Bord des Forschungsschiffs Akademik Mstislav Keldysh.  "Welten" wurden während der Expedition zum versunkenen Atom-U-Boot "Komsomolets" eingesetzt. Dann tauchten die Tauchboote 70 Mal auf eine Tiefe von 1.700 m. Atlantik, Pazifik und Indische Ozeane, und am 2. August 2007 wurde zum ersten Mal auf der Welt der Grund des Arktischen Ozeans am Nordpol erreicht, wo die russische Flagge und eine Kapsel mit einer Botschaft an zukünftige Generationen platziert wurden. AS-30 Die russische Marine verwendet den Code "Priz" für Tiefsee-Tauchboote des Projekts 1855. Eines der modernsten Tauchboote dieser Serie ist das Tauchboot AS-30. Es wurde kürzlich modernisiert, wobei veraltete Spezialausrüstung vollständig durch digitale Erzeugungssysteme ersetzt wurde.Anders als die Mirs umfasst diese Apparatur keine wissenschaftliche und ozeanographische Forschung, sondern ist darauf ausgelegt, Besatzungen von Notfall-U-Booten zu retten, indem Notausgänge von U-Booten angedockt werden.
"Welten" wurden während der Expedition zum versunkenen Atom-U-Boot "Komsomolets" eingesetzt. Dann tauchten die Tauchboote 70 Mal auf eine Tiefe von 1.700 m. Atlantik, Pazifik und Indische Ozeane, und am 2. August 2007 wurde zum ersten Mal auf der Welt der Grund des Arktischen Ozeans am Nordpol erreicht, wo die russische Flagge und eine Kapsel mit einer Botschaft an zukünftige Generationen platziert wurden. AS-30 Die russische Marine verwendet den Code "Priz" für Tiefsee-Tauchboote des Projekts 1855. Eines der modernsten Tauchboote dieser Serie ist das Tauchboot AS-30. Es wurde kürzlich modernisiert, wobei veraltete Spezialausrüstung vollständig durch digitale Erzeugungssysteme ersetzt wurde.Anders als die Mirs umfasst diese Apparatur keine wissenschaftliche und ozeanographische Forschung, sondern ist darauf ausgelegt, Besatzungen von Notfall-U-Booten zu retten, indem Notausgänge von U-Booten angedockt werden.  Experten halten die Geräte dieses Projekts für die effektivsten Rettungsgeräte in der russischen Flotte.Das Gerät war mit Kameras und Manipulatoren ausgestattet, die Metallkabel mit einem Durchmesser von bis zu 10 mm schneiden, Unterwasserschweißen durchführen, Muttern festziehen und lösen konnten. Es verfügt über eine spezielle Vorrichtung zum Andocken an die Süllplattform des U-Bootes, durch die die U-Bootfahrer das Not-U-Boot verlassen. AS-34 Eine weitere Einheit dieser Serie AS-34 befindet sich in den Reihen der russischen Marine. Es befindet sich an Bord des Rettungsschiffes Georgy Titov. Die Modernisierung, die der AC-34 kürzlich durchlaufen hat, hat es ermöglicht, die Lebensdauer des Bathyscaphe bis 2032 zu verlängern.
Experten halten die Geräte dieses Projekts für die effektivsten Rettungsgeräte in der russischen Flotte.Das Gerät war mit Kameras und Manipulatoren ausgestattet, die Metallkabel mit einem Durchmesser von bis zu 10 mm schneiden, Unterwasserschweißen durchführen, Muttern festziehen und lösen konnten. Es verfügt über eine spezielle Vorrichtung zum Andocken an die Süllplattform des U-Bootes, durch die die U-Bootfahrer das Not-U-Boot verlassen. AS-34 Eine weitere Einheit dieser Serie AS-34 befindet sich in den Reihen der russischen Marine. Es befindet sich an Bord des Rettungsschiffes Georgy Titov. Die Modernisierung, die der AC-34 kürzlich durchlaufen hat, hat es ermöglicht, die Lebensdauer des Bathyscaphe bis 2032 zu verlängern.  Der Rumpf des Rettungsschiffes besteht aus Titan. Und obwohl die Arbeitstiefe des SGA 500 Meter beträgt, kann das Gerät bei Bedarf bis zu einer Tiefe von 1000 Metern absteigen und U-Boote mit erhöhtem Rauch und hohem Druck aus einem Notboot evakuieren. Das zweite Abteil AS-34 dient als Druckkammer. Diese Einheit kann bis zu 20 Taucher an Bord nehmen, normalerweise besteht die Besatzung eines Bathyscaphe aus drei Personen. Die Sauerstoffversorgung für die Arbeit von drei Personen ist auf 120 Stunden ausgelegt. Über die Situation mit geretteten Menschen - für 10 Stunden. Bester-1 Ein weiteres neuestes Tiefseerettungsfahrzeug ist der AS-40 Bester-1. Im vergangenen Jahr trat er den Kampfdienst in Wladiwostok an. Das einzigartige Tauchboot, das ausländischen Analoga überlegen ist, kann die Besatzung eines U-Bootes in Not aus einer Tiefe von mehr als 700 Metern trocken evakuieren und befindet sich an Bord der Igor Belousov, dem führenden Rettungsschiff der Pazifikflotte, das keine hat Einschränkungen der Seetüchtigkeit.
Der Rumpf des Rettungsschiffes besteht aus Titan. Und obwohl die Arbeitstiefe des SGA 500 Meter beträgt, kann das Gerät bei Bedarf bis zu einer Tiefe von 1000 Metern absteigen und U-Boote mit erhöhtem Rauch und hohem Druck aus einem Notboot evakuieren. Das zweite Abteil AS-34 dient als Druckkammer. Diese Einheit kann bis zu 20 Taucher an Bord nehmen, normalerweise besteht die Besatzung eines Bathyscaphe aus drei Personen. Die Sauerstoffversorgung für die Arbeit von drei Personen ist auf 120 Stunden ausgelegt. Über die Situation mit geretteten Menschen - für 10 Stunden. Bester-1 Ein weiteres neuestes Tiefseerettungsfahrzeug ist der AS-40 Bester-1. Im vergangenen Jahr trat er den Kampfdienst in Wladiwostok an. Das einzigartige Tauchboot, das ausländischen Analoga überlegen ist, kann die Besatzung eines U-Bootes in Not aus einer Tiefe von mehr als 700 Metern trocken evakuieren und befindet sich an Bord der Igor Belousov, dem führenden Rettungsschiff der Pazifikflotte, das keine hat Einschränkungen der Seetüchtigkeit.  Eine Besonderheit von „Bester“ ist auch, dass es schnell mobil werden kann. Experten zufolge kann das Gerät nicht nur von der Igor Belousov, sondern auch von anderen Rettungsschiffen verwendet werden, nachdem es umgehend von einem Frachtflugzeug an eine der Flotten übergeben wurde.
Eine Besonderheit von „Bester“ ist auch, dass es schnell mobil werden kann. Experten zufolge kann das Gerät nicht nur von der Igor Belousov, sondern auch von anderen Rettungsschiffen verwendet werden, nachdem es umgehend von einem Frachtflugzeug an eine der Flotten übergeben wurde.
(GOA) für Meeresforschung und Rettungseinsätze.
Die Flotte des nach Pyotr Shirshov benannten Instituts für Ozeanologie der Russischen Akademie der Wissenschaften umfasst zwei bemannte Tiefsee-Tauchboote vom Typ Mir: GOA Mir 1 und Mir 2. Sie wurden 1987 in Finnland von Rauma Repola gebaut. Die Geräte wurden unter der wissenschaftlichen und technischen Leitung von Wissenschaftlern und Ingenieuren des Instituts für Ozeanologie der Russischen Akademie der Wissenschaften entwickelt. Die Erstellung der Geräte begann im Mai 1985 und wurde im November 1987 abgeschlossen. Im Dezember 1987 wurden Tiefseetests von Fahrzeugen im Atlantik in einer Tiefe von 6170 Metern ("Mir 1") und 6120 Metern ("Mir 2") durchgeführt. Die Geräte wurden auf dem Hilfsschiff „Akademik Mstislav Keldysh“ installiert, das 1981 in Finnland gebaut und 1987 für den Betrieb mit Tiefseetestgeräten umgerüstet wurde.
GOA „Mir 1“ und „Mir 2“ sind baugleich und ausgelegt für eine Betriebstauchtiefe von 6000 m. Gesamtkapazität Batterien Ein Gerät hat eine Leistung von 100 kW / h, sodass Sie Unterwasseroperationen für 17 bis 20 Stunden ununterbrochenen Unterwasserzyklus durchführen können. Darüber hinaus ermöglicht dies die Installation eines großen Komplexes an wissenschaftlicher und Navigationsausrüstung auf beiden Fahrzeugen.
Bemannte Tiefsee-Tauchboote „Mir-1“ und „Mir-2“
Die bemannten Tiefsee-Tauchboote Mir-1 und Mir-2 wurden in Finnland von der Firma Rauma Repola im Rahmen eines sowjetisch-finnischen Gemeinschaftsprojekts gebaut. Der Bau der Fahrzeuge begann im Mai 1985 und endete im November 1987. Im Dezember 1987 wurden die Fahrzeuge im Atlantik in Tiefen von 6170 m bzw. 6120 m getestet. Während des 20-jährigen Betriebs führten Mir-Tauchboote eine Vielzahl von Tiefseeoperationen durch. Es gab eine große Menge wissenschaftliche Forschung in verschiedenen Regionen der Ozeane. Die Hauptforschungsrichtung war die Untersuchung hydrothermaler Felder am Meeresgrund. Die Geräte arbeiteten in 20 Gebieten mit hydrothermalen Feldern im pazifischen, atlantischen und arktischen Ozean. An versunkenen Objekten wie der Titanic (3500 m), der Bismarck (4700 m), dem japanischen U-Boot des Zweiten Weltkriegs I-52 (5400 m) und anderen wurden zahlreiche archäologische Untersuchungen durchgeführt. Mit Hilfe der Geräte wurden Tiefseefilm- und Videoaufnahmen für Spiel- und populärwissenschaftliche Filme gemacht. Mehr als 10 Filme wurden veröffentlicht, der bekannteste davon ist der berühmte „Titanic“ von James Cameron.
Einen besonderen Platz in der Geschichte der Mirs nehmen die Arbeiten an den versunkenen Atom-U-Booten Komsomolets und Kursk ein, bei deren Untersuchung eine Vielzahl wissenschaftlicher und unterwassertechnischer Probleme gelöst wurden. Bis heute hat jedes der Mir-Tauchboote mehr als 400 Tauchgänge absolviert, davon 70 % in Tiefen zwischen 3000 und 6000 m. Die Tauchboote haben sich als äußerst zuverlässiges technisches Mittel erwiesen, das in der Lage ist, fast jedes Problem in den Tiefen des Meeres zu lösen Ozean. Allerdings hat die Raumsonde Mir bisher noch nie unter einer durchgehenden Eisdecke operiert. Natürlich erforderte die Lösung dieses Problems sowohl eine gewisse Modernisierung des Geräts als auch die Entwicklung neuer Ausrüstung, die es ermöglichen würde, solche Tauchgänge erfolgreich durchzuführen. Bevor Sie mit der Präsentation des Materials zum Tauchen am Nordpol fortfahren, ist es ratsam, Fragen im Zusammenhang mit den Konstruktionsmerkmalen der Mirs und den Innovationen zu berücksichtigen, die eingeführt wurden, um die sehr schwierige Aufgabe des Abstiegs zum Grund zu erfüllen Nordpol. Viele ausländische Experten nennen bemannte Tiefsee-Tauchboote Mini-U-Boote. Offensichtlich liegt dies an einigen ihrer Ähnlichkeiten mit großen U-Booten, sowohl im Design als auch in der Funktionsweise - im Modus der freien Navigation unter Wasser ohne starre oder flexible Verbindungen (wie Kabel oder Kabel) mit der Oberfläche oder mit der Hilfsschiff. Die Sicherheit des Aufenthalts einer Person in großen Tiefen wird in erster Linie durch einen starken Körper gewährleistet; Die übrigen Elemente und Systeme des Geräts sind so ausgelegt, dass sie einen dauerhaften Körper in eine bestimmte Tiefe bringen, sich unter Wasser bewegen und an die Oberfläche zurückkehren. Batterien werden in den meisten modernen GOA als Energiequelle verwendet. Der robuste Körper, einzelne Strukturelemente und Grundkomponenten der Systeme werden durch einen Verbindungsrahmen zu einer einzigen Struktur kombiniert, die oben mit einem leichten Körper abgeschlossen wird, der normalerweise aus Glasfaser besteht und dem Gerät eine stromlinienförmige Form verleiht. Dies ist das allgemeine Konstruktionsschema des bewohnbaren Fahrzeugs.
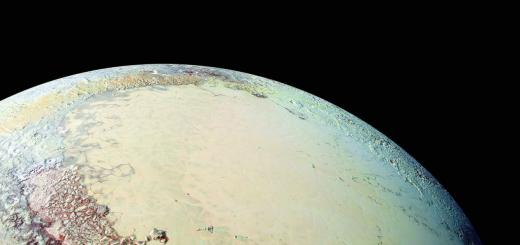
Das Design des bemannten Tiefsee-Tauchboots „Mir“
Eintauchtiefe 6000 m
Besatzung 3 Menschen
Geschwindigkeit 5 Knoten
Gewicht 18,6 t
Maße 7,8 x 3,2 x 3,0 m

1 bewohnbare Sphäre
2 leichter Körper
3 Ballastkugeln
4 Manipulatoren
5 einziehbare Instrumentenstangen
6 leistungsstarke Lampen
7 Fernsehen, Fotokameras auf einem Drehgerät
8 Ski unterstützen
9 Schrotbehälter aus Nickel (Notballast)
10 Seitenmotor
11 Hochdruck-Ballastwasserpumpe
12 Hydraulikstation mit Elektroantrieb
13 Boxen mit 120-Volt-Batterien
14 Boxen mit 24-Volt-Batterien
15 Haupttriebwerk
16 Haupttriebwerksdüse
17 Flügel
18 Notboje
Aus dem Buch von A.M.Sagalevich "Tiefe". " wissenschaftliche Welt“, 2002
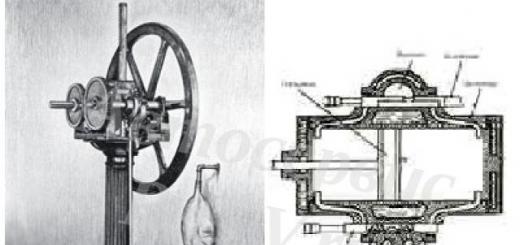
Es sei darauf hingewiesen, dass bemannte Tiefseefahrzeuge sehr oft Bathyscaphes genannt werden. Dies ist jedoch nicht wahr. Bathyscaphes waren die erste Generation autonomer bewohnbarer Fahrzeuge. Auf Bathyscaphes wurde eine leichte Flüssigkeit, Benzin, als Schwimmmaterial verwendet. Das Bathyscaphe hatte einen riesigen Schwimmer, in den vor dem Tauchen bis zu 200 Tonnen Benzin gepumpt wurden, das während des Tauchgangs durch Wasser ersetzt wurde und das Bathyscaphe einen negativen Auftrieb erhielt. Am Ende der Arbeiten am Boden wurde fester Ballast (normalerweise Stahlschrot) von der Bathyscaphe abgeworfen und sie begann zu schwimmen. In bewohnbaren Tiefsee-Tauchbooten wird als Schwimmmaterial ein festes Schwimmmaterial syntaktisch verwendet, dessen Basis Mikroballons aus Glas sind, die durch Epoxidharz zu einem Ganzen verbunden sind. Syntactic wird in Form von Blöcken hergestellt, sie können beim Gießen eine andere Form erhalten. Aufgrund der Verwendung der GOA-Syntax sind sie klein und leicht und können an Bord von Forschungsschiffen zum Tauchplatz transportiert werden. Bis heute gibt es weltweit nur vier GOAs, die bis zu einer Tiefe von 6000 m tauchen können: eines in Frankreich (Nautilus), eines in Japan (Shinkai-6.5) und zwei in Russland - Mir-1 und " Mir-2". . Betrachten wir kurz das Design der Mir-Geräte. Das robuste Gehäuse des Tauchboots Mir besteht aus Stahl mit hohem Nickelanteil. Zwei gegossene und bearbeitete Halbkugeln sind mit Bolzen verbunden. Die Kugel hat drei Bullaugen: ein zentrales mit einem Innendurchmesser von 200 mm und zwei Seitenfenster mit einem Durchmesser von 120 mm. Bullaugen bieten gute Bewertung beim Arbeiten unter Wasser. Als Energiequelle werden Nickel-Cadmium-Akkus verwendet, die die ursprünglich verwendeten Eisen-Nickel-Akkus ersetzten. Die Gesamtenergiereserve des Mir-Apparats beträgt 100 kW/h. Das Gerät verfügt über drei Ballastsysteme.

Das Hauptballastsystem besteht aus zwei Tanks aus Fiberglas. Ihre Gesamtkapazität beträgt 1500 Liter. Wenn die Vorrichtung eingetaucht ist, werden die Behälter mit Wasser gefüllt, wodurch ihr Auftrieb nahezu neutral wird. Die weitere Ballastierung erfolgt über ein dünnes Ballastsystem, mit dem Sie den Auftrieb in einem weiten Bereich einstellen können, sodass Sie mit einer Geschwindigkeit von bis zu 35–40 m/min sinken und auftauchen und an jedem Horizont in der Wassersäule schweben können . Beim Auftauchen werden die Tanks des Hauptballastsystems mit Luft gespült, was dem Fahrzeug einen Auftrieb von +1500 kg verleiht und eine normale Wasserlinie auf der Welle gewährleistet. Das Feinballastsystem besteht aus drei massiven Kugeln – zwei vorn und einer hinten – mit einer Gesamtkapazität von 999 Litern. Während des Eintauchens des Geräts in diese Kugeln wird Wasser aufgenommen, wodurch Sie den Auftrieb einstellen können. Um der Apparatur einen positiven Auftrieb zu verleihen, wird mit speziellen Hochdruckpumpen Wasser aus den festen Kugeln gepumpt.

So arbeiten die Mir-Tauchboote vollständig mit Wasserballast, im Gegensatz zu ausländischen Tiefsee-Tauchbooten, die teilweise weiterhin das Prinzip der Bathyscaphe nutzen, also das Ablassen von festem Ballast in Form von Gusseisenbarren oder Sandsäcken. Die Hochdruckpumpen werden hydraulisch angetrieben. Die Geräte verfügen über drei Hydrauliksysteme. Die erste mit einer Leistung von 15 kW steuert die Haupthochdruckpumpe und den Fahrzeugantrieb. Die Energie der Batterien wird über einen speziellen Wechselrichter in Wechselstrom umgewandelt, der den Elektromotor – den Antrieb der Hydraulikpumpe – speist. Die Hochdruckpumpe und das Antriebssystem werden über ein System von Ventilen gesteuert, die sich außerhalb in einem Ölkasten befinden und vom Piloten aus der bewohnbaren Sphäre gesteuert werden. Das zweite Hydrauliksystem ist ähnlich angeordnet, hat aber eine geringere Leistung - 5 kW. Es steuert alle externen einziehbaren Geräte: Manipulatoren, Stangen, Bunker usw., eine Trimmpumpe, die Wasserballast vom Bug zum Heck und zurück pumpt und dadurch den gewünschten Trimmwinkel des Geräts bereitstellt. Darüber hinaus steuert das zweite Hydrauliksystem die zweite Hochdruckpumpe, die als Notfall eingesetzt wird: Bei einem Ausfall der Hauptpumpe oder des ersten Hydrauliksystems ermöglicht die zweite Pumpe das Abpumpen des Ballastwassers und den Aufstieg des Fahrzeugs an die Oberfläche sicherstellen. Das dritte Hydrauliksystem ist ein Notfallsystem, das es ermöglicht, einige Teile des Geräts im Notfall zurückzusetzen. Die Hydraulikpumpe in diesem System wird von einem Gleichstrom-Elektromotor angetrieben, der direkt von den Hauptbatterien des Geräts oder von einer Notbatterie gespeist wird. Es sei darauf hingewiesen, dass die Entlastung einzelner Elemente der Vorrichtung im Notfall auch aus dem zweiten Hydrauliksystem erfolgen kann. Die folgenden Gegenstände können vom Mir-Gerät fallen gelassen werden.

Dies sind zunächst die hervorstehenden Teile der Struktur (mit denen sich das Gerät an der Unterseite von Kabeln, Kabeln usw. verfangen kann): die Haupt- und Seitenbeweger; Flügel; Manipulatorbürsten (falls etwas in die Bürste aufgenommen wird und der Mechanismus zum Lösen nicht funktioniert); eine Notboje, die nach dem Rückstoß des Geräts an einem dünnen, 8000 Meter langen Nylonkabel an die Oberfläche kommt; zusätzlich kann der untere Batteriekasten der ca. 1000 kg schweren Hauptbatterie abgesenkt werden. Die Mir-Fahrzeuge haben auch ein Notballastsystem (oben als drittes Ballastsystem erwähnt). Zwei starre Glasfaserbehälter enthalten 300 kg Nickelschrot, die von Elektromagneten gehalten werden, deren Spannungsabnahme eine teilweise oder vollständige Freisetzung des Schrots ermöglicht und dem Gerät einen positiven Auftrieb verleiht. Ein wichtiger Bestandteil der Fahrzeuge ist das Antriebssystem. Das Haupt-Heckstrahlruder mit einer Leistung von 12 kW steuert die Bewegung in der horizontalen Ebene und sorgt für Drehungen des Fahrzeugs innerhalb von ±60°. Zwei Seitenstrahlruder mit einer Leistung von jeweils 3,5 kW verfügen über eine Drehvorrichtung, mit der sie in einer vertikalen Ebene innerhalb von 180 ° gedreht werden können; Dadurch ist es möglich, die vertikale Bewegung der Vorrichtung während ihrer Vorwärtsbewegung auf dem Hauptbeweger sowie in der horizontalen Ebene im Falle eines Ausfalls des Hauptbewegers auszuführen. Eine solche Vorrichtung des Komplexes bietet eine flexible Steuerung des Fahrzeugs und verleiht ihm eine gute Manövrierfähigkeit, was sehr wichtig ist, wenn in Bodennähe in schwierigem Gelände oder an Bodenobjekten mit komplexer Konfiguration gearbeitet wird. Innerhalb der bewohnbaren Sphäre während des Tauchgangs normal Atmosphärendruck und Gaszusammensetzung der Luft. Das Lebenserhaltungssystem umfasst Sauerstoffflaschen mit Spendern, durch die die Atmosphäre innerhalb der Kugel mit Sauerstoff aufgefüllt wird, und eine Sammlung Kohlendioxid mit austauschbaren Kassetten gefüllt mit einem CO 2 -Absorber (meist Lithium- oder Kaliumoxidhydrat). Ventilatoren treiben ständig Luft durch einen Kohlendioxidabsorber sowie durch einen speziellen Filter für schädliche Verunreinigungen, der mit Aktivkohle und Palladium gefüllt ist. Dadurch wird die Atmosphäre in der Kabine gereinigt. Die Kontrolle des Gehalts verschiedener Komponenten darin erfolgt mithilfe spezieller Indikatoren, die den Prozentsatz an Sauerstoff, Kohlendioxid und Kohlenmonoxid in der Atmosphäre anzeigen. Es gibt auch Druck-, Temperatur- und Feuchtigkeitsmonitore in der Kabine. GOA "Mir" sind ausgestattet mit moderne Mittel Unterwassernavigation. Damit können Sie die genaue Position des Geräts unter Wasser in Bezug auf hydroakustische Bodenbaken bestimmen, deren Einstellung und Kalibrierung an Bord des Schiffes gemäß den Daten des Satellitennavigationssystems durchgeführt werden. Der Pilot kann die Flugbahn der Tauchbewegung unter Wasser auf dem Display beobachten, was zweifellos Komfort bei der Steuerung bei Suchvorgängen, beim Erreichen von Bodenobjekten usw. schafft. Das hydroakustische Unterwasserkommunikationssystem bietet eine drahtlose Sprachkommunikation mit dem Schiff in einer Entfernung von bis bis 10 Meilen. Sonarmittel ermöglichen es Ihnen, kleine Objekte mit einer Größe von bis zu einigen zehn Zentimetern am Boden zu suchen. Die Geräte sind mit hydrophysikalischen und hydrochemischen Sensoren, speziellen Probenahmegeräten und anderen wissenschaftlichen Geräten ausgestattet. Zwei identische Manipulatoren (rechts und links) mit sieben Freiheitsgraden ermöglichen die Entnahme verschiedenster Proben – von sehr zerbrechlich bis groß und schwer mit ca. 80 kg. Die Mir-Tauchboote sind mit moderner Videoausrüstung für Unterwasser-Videoaufnahmen sowie Unterwasser-Fotosystemen ausgestattet. Die Geräte sind mit externen Licht- und Funkfeuern ausgestattet, die es ermöglichen, sie nach dem Auftauchen an der Oberfläche zu orten: Das Funksuchsystem auf dem Hilfsschiff empfängt Signale des Funkfeuers und zeigt die Richtung zum Oberflächenpunkt des Geräts an. Tauchen am Nordpol unter einer durchgehenden Eisdecke erforderlich Spezielles Training"Mir"-Fahrzeuge: Modernisierung einiger Systeme, Entwicklung neuer Ausrüstung, die den Austritt des Tauchboots unter dem Eisdach in eine kleine Öffnung an der Meeresoberfläche gewährleisten würde.
"Mir" ist eine Serie russischer bemannter Unterwasser-Tiefseefahrzeuge (GOA) für ozeanografische Forschungs- und Rettungseinsätze.
Sie haben eine Tauchtiefe von bis zu 6 km. basierend auf Bord Forschung Schiff "Akademik Mstislav Keldysh".
Geschichte Ab 2008 verfügt die Flotte des Instituts für Ozeanologie der Russischen Akademie der Wissenschaften über zwei bemannte Tiefsee-Tauchboote vom Typ Mir: MIR-1 und MIR-2.
Sie wurden 1987 in Finnland von der Firma „Rauma-Repola“ unter der wissenschaftlichen und technischen Leitung von Wissenschaftlern und Ingenieuren des gleichnamigen IORAN gebaut. P. P. Shirshova.
Die Konstruktion des GOA wurde im Mai 1985 begonnen und mit dem Bau der Fahrzeuge im November 1987 abgeschlossen, und bereits im Dezember 1987 wurden werksseitige Tiefseetests der Fahrzeuge im Atlantik durchgeführt.
Die Eintauchtiefe betrug 6170 m für MIR-1 und 6120 m für MIR-2. Das Trägerschiff der GOA ist die 1981 in Finnland gebaute und 1987 zum Versorgungsschiff umgebaute Akademik Mstislav Keldysh. Zwischen 1987 und 1991 wurden 35 Expeditionen in den Atlantik, Pazifik und Indischen Ozean mit den Tauchbooten Mir-1 und Mir-2 durchgeführt.
Die Geräte wurden bei den Dreharbeiten zu James Camerons Filmen „Titanic“, „Ghosts of the Abyss: Titanic“ im Jahr 1997 und „Die Bismarck-Expedition“ im Jahr 2002 verwendet.
Mit Hilfe von Mir-Tauchbooten wurden in den Gebieten des Mittelatlantischen Rückens hydrothermale Quellen erkundet und auch das gesunkene U-Boot Komsomolets untersucht. Im Zeitraum 1989-1998 wurden sieben Expeditionen im Todesgebiet des Atom-U-Bootes "Komsomolets" in der Norwegischen See durchgeführt. Ende September 2000 wurden die Geräte zur Vermessung des Atom-U-Bootes Kursk eingesetzt.
Sowohl das Schiff „Akademik Mstislav Keldysh“ als auch die Unterwasserfahrzeuge gehören dem nach A.I. P. P. Shirshov RAS.
Die Idee von Apparaten u anfängliches Projekt wurden in der Akademie der Wissenschaften der UdSSR und KB "Lazurit" ausgearbeitet. Tiefsee-Tauchboote wurden 1987 von der finnischen Firma Rauma Repola hergestellt. Das Schiff „Akademik Mstislav Keldysh“ wurde 1981 auf der finnischen Werft Hollming in der Stadt Rauma gebaut.
Am 2. August 2007 erreichten diese Geräte zum ersten Mal weltweit den Grund des Arktischen Ozeans am Nordpol, wo die russische Flagge und eine Kapsel mit einer Botschaft an zukünftige Generationen platziert wurden. Die Geräte hielten einem Druck von 430 Atmosphären stand.
Design
Der Körper der Geräte besteht aus martensitischem, hochlegiertem Stahl mit 18 % Nickel. Die Legierung hat eine Streckgrenze von 150 kg/mm² (Titan hat ca. 79 kg/mm²). Produzent: Finnisches Unternehmen Lokomo, das zum Konzern Rauma Repola gehört. Unterkunft der Besatzung Die Besatzung des Tauchboots Mir besteht aus drei Personen - einem Piloten, einem Ingenieur und einem Wissenschaftler-Beobachter.
Rettungssystem
Das Notrettungssystem des Geräts besteht aus einer syntaktischen Boje, die von der Besatzung freigegeben wird, mit einem daran befestigten Kevlar-Kabel, 7000 m lang, entlang dem die Hälfte der Kupplung abgesenkt wird (wie bei einer automatischen Eisenbahnkupplung).
Es erreicht das Gerät, dann erfolgt eine automatische Kupplung und das Gerät wird an einem 6500 m langen Stromkabel mit einer Bruchkraft von etwa zehn Tonnen angehoben.
Vergleichende Bewertung
Ab 2008 gibt es neben den russischen Mir-1 und Mir-2 zwei weitere Geräte auf der Welt (drei wurden gebaut). Die amerikanische Sea Cliff (eng. DSV Sea Cliff), die derzeit umgebaut wird, die französische Nautile (fr. Nautile), beide mit einer Tauchtiefe von 6000 Metern, und die japanische Shinkai 6500 (Shinkai 6500), die einen Tauchgang einstellte Rekord für vorhandene Geräte bei 6527 Metern.
Erkundung des Baikalsees
Seit Juli 2008 befinden sich beide Geräte am Baikalsee. An diesem See machten sie ihre ersten tiefen Tauchgänge frisches Wasser. Es ist geplant, die Expedition im Jahr 2009 fortzusetzen, während der 100 Tauchgänge absolviert werden.
Am 30. Juli 2008 kollidierte das Tauchboot Mir-2 mit einer schwimmenden Plattform und erlitt Schäden am linken Propeller.
Im Jahr 2008 wurden im mittleren und südlichen Becken des Sees 53 Tauchgänge durchgeführt, an denen 72 Hydronauten teilnahmen. Die Art des Auftretens von Ölteppichen auf der Oberfläche des Sees wurde untersucht, Tierwelt.
Es wurden vier Ebenen alter "Strände" entdeckt, was bedeutet, dass der Baikal allmählich gefüllt wurde. In 800 Metern Tiefe drei Kisten mit Patronen aus der Zeit Bürgerkrieg, 7 Runden wurden angehoben.
Der russische Premierminister Wladimir Putin tauchte am 1. August 2009 mit dem Tauchboot Mir auf den Grund des Baikalsees.
Bemerkenswerte Kommandeure
Anatoly Sagalevich
Chernyaev Evgeny Sergeevich
Innendurchmesser der Wagenkugel = 2,1 m
Allgemein
Die Idee der Geräte und das ursprüngliche Design wurden in der Akademie der Wissenschaften der UdSSR und KB "Lazurit" ausgearbeitet. Tiefsee-Tauchboote wurden 1987 von der finnischen Firma Rauma Repola hergestellt. Das Basisschiff, das Schiff Akademik Mstislav Keldysh, wurde 1981 auf der finnischen Werft Hollming in der Stadt Rauma gebaut, 1987 wurden die Mir-1 und Mir-2 GOA auf dem Basisschiff installiert und in Betrieb genommen. Auf diese Weise wurde ein einzigartiger Forschungskomplex geschaffen, der mit modernen wissenschaftlichen Präzisions- und Navigationsgeräten und -instrumenten für die Durchführung einer breiten Palette ozeanologischer Forschung ausgestattet ist. Sowohl das Schiff „Akademik Mstislav Keldysh“ als auch die Unterwasserfahrzeuge gehören dazu.
"Worlds" gab Anlass zu einer neuen Richtung in wissenschaftliche Studie Ozean. Der Forschungskomplex, der das Schiff und das Tauchboot Mir kombiniert, hat weltweit keine Analoga. Das integrierte Datenerfassungssystem, das eine Vielzahl von Messgeräten und Recheneinrichtungen von 15 Laboren kombiniert, ermöglicht es, atmosphärische Daten automatisch zu sammeln, zu verarbeiten und aufzuzeichnen. aquatische Umgebung und Bodengrund. Toller Wert für die wissenschaftliche Forschung hat eine einzigartige Arbeitstiefe von "Welten" - 6000 Meter.
Geschichte
Die Geschichte der Mirs beginnt in den frühen 1980er Jahren, als die Akademie der Wissenschaften der UdSSR beschloss, ihr Geräte für die Tiefseeforschung zur Verfügung zu stellen. Die ersten Versuche, Unterwasserfahrzeuge zu bestellen, blieben erfolglos: Die gemeinsame Arbeit mit einer kanadischen Firma im Jahr 1980 stieß auf eine Reihe technischer Probleme - es war nicht möglich, eine Kammer für die Besatzung zu schaffen, die 600 Bar Titan standhält, und vor allem politische Hindernisse: Die Vereinigten Staaten sahen in einer solchen Anordnung eine Verletzung des Verbotsvertrags von COCOM für den Export fortschrittlicher Technologien in die UdSSR. 1982 bot die Akademie der Wissenschaften der UdSSR drei anderen möglichen Herstellern einen Auftrag an. Als die schwedischen und französischen Unternehmen das Angebot ablehnten, blieb das Unternehmen bestehen Rauma-Repola mit seiner Tochtergesellschaft Ozeanik- Finnland hat kein Abkommen unterzeichnet, das den Export fortschrittlicher Technologien in die UdSSR verbietet. Der Friedensvertrag verbot den Besitz und Bau von U-Booten, aber dieser Paragraph galt nur für militärische Ausrüstung, und die bestellten Geräte waren Recherchen. Laut Pekka Laxella, dem damaligen Leiter des finnischen Unternehmens, wurde die Genehmigung zum Export in die UdSSR nur eingeholt, weil die KOCOM-Beamten nicht glaubten, dass aus einem solchen Unternehmen etwas werden würde. Als klar wurde, dass die technischen Probleme gelöst waren, wurde viel Aufhebens darüber gemacht, wie solche Technologien an die UdSSR verkauft werden könnten, und Laksell musste das Pentagon mehrmals besuchen.
Diplomatische Krise mit den USA
Die US-Botschaft in Helsinki war von Anfang an über die Entwicklung der Tiefseekammern Rauma Repola informiert. „Sie hatten noch eine technisch ungebildete Gruppe, die das Projekt nicht richtig einschätzen konnte. Das Projekt durfte weitergeführt werden – die Amerikaner waren sich absolut sicher, dass das Gießen einer Kugel aus Stahl scheitern würde. Alle bisherigen Kugeln wurden aus Titan geschweißt“, sagte der damalige CEO im Jahr 2003 Rauma-Repola Tauno Matomyaki. „Wir haben ein Unternehmen gegründet Rauma-Repola Oceanics Oy Gleichzeitig sagte Tauno Matomyaki, „nur um diese Tochtergesellschaft zu opfern und nicht das gesamte Unternehmen zu gefährden, wenn etwas schief geht“. Und so geschah es. Die Tochtergesellschaft wurde 1983 gegründet und kurz nach der Gründung von Worlds im Jahr 1987 aufgelöst Rauma-Repola nicht die erwarteten Bestellungen erhalten. Die Eintrittskarte in das neue Areal erwies sich als zu teuer – CIA und Pentagon pochten darauf, dass alle Unternehmen, die sich nicht an amerikanische Empfehlungen halten, ausnahmslos bankrott gehen.
Die Vereinigten Staaten versuchten, den Export von Fertiggeräten in die UdSSR heimlich zu verhindern. Die CIA vermutete, dass die Geräte in US-Hoheitsgewässern zur Aufklärung eingesetzt werden könnten.
Präsident Mauno Koivisto erzählt in einer Abhandlung, dass die US-Botschaft drohte, finnische Firmen könnten sonst keine Genehmigung für Dutzende von Lizenzen erhalten die Sowjetunion die Geräte bekommen. Der damalige Vizepräsident George W. Bush schrieb einen Brief an Koivisto, in dem er vermutete, dass die Aktivitäten von Rauma-Repol die Weltsicherheit gefährden würden. In seiner Antwort erklärte Koivisto, dass er nach den Gesetzen des Landes keine Möglichkeit habe, sich in die Angelegenheiten eines Privatunternehmens einzumischen, wenn es nicht gegen die Gesetze verstoße. Außerdem betonte er, dass der Handel mit der UdSSR besonders sorgfältig überwacht werde.
Unter dem Druck der CIA und des Pentagon Rauma-Repola war gezwungen, die Schaffung von Tiefseefahrzeugen und die vielversprechende Entwicklung der Meerestechnologie aufzugeben. Solche Vorrichtungen werden beim Bau und der Wartung von Ölplattformen benötigt. Ein aufgegebenes Projekt war die Entwicklung von Brennstoffzellen. Feste Rauma-Repola hat die Herstellung von Ölplattformen aufgegeben und beschäftigt sich heute hauptsächlich mit der Holzverarbeitung. Rauma-Repola war damals der sechstgrößte Konzern in Finnland und beschäftigte 18.000 Mitarbeiter. Nun wird ihr Geschäft im Bereich der Metallbearbeitung vom Konzern weitergeführt Metso .
Design und Herstellung
Herstellung von Apparatekugeln, die standhalten können Hoher Drück, war das Verdienst der Ingenieure des Unternehmens Repola und Anwendungen neue Technologie. Dies war dank der harten Arbeit des gesamten Designteams und des hohen Niveaus der Metallurgie möglich. Die Firma unterzeichnete den Vertrag, bevor die endgültige Technologie bekannt war, und ging das Risiko sowohl in technischer als auch in kaufmännischer Hinsicht ein. Für die Verarbeitungstechnologie ist ein deutsches Patent angemeldet, aber noch nicht genehmigt.
Zwei-Meter-Kugeln der Besatzung für Tiefseefahrzeuge sollten so leicht wie möglich sein, damit die Dichte des gesamten Apparats nahezu eins ist - die Dichte von Wasser. Dann kann das Gerät in jeder Tiefe autonom gesteuert werden. In der Praxis bedeutet dies, dass die Kugel aus einem besonders starken und leichten Metall bestehen muss. Titan ist gut für seine geringe Dichte, aber seine Bruchfestigkeit ist immer noch geringer als die von Stahl. Daher sollten Titanwände doppelt so dick sein wie Stahl. Titan kann auch nicht in so große Stücke gegossen werden, um eine Kugel ohne die Verwendung von Schweißen zusammenzubauen.
Rauma-Repola ging sofort den Weg, eine Stahlkugel herzustellen - das Unternehmen verfügte über eine geeignete Gießereiausrüstung im Unternehmen Lokomo. Als Material wurde Maragenstahl (Maragen) gewählt, der in den 1960er Jahren von der US Navy entwickelt wurde und dessen Festigkeits-Dichte-Verhältnis um 10 % besser ist als das von Titan. Die Legierung enthält fast ein Drittel der Zusätze Kobalt, Nickel, Chrom und Titan. Entscheidend für die Schlagzähigkeit ist der Titananteil. Dieser Stahl wird üblicherweise zum Bau von Fahrzeugwellen verwendet.
Durch die Verbindung der beiden Halbkugeln mit Bolzen wurden das Schweißen und die damit verbundenen Probleme der Wärmeeinwirkung auf die Festigkeit vollständig vermieden. Das amerikanische Exportverbot konnte die Herstellung von Geräten nicht verhindern, verursachte jedoch verschiedene Hindernisse und zusätzliche Kosten für das Projekt. Beispielsweise wurde die Elektronik der Geräte von Hollming entwickelt und gebaut, obwohl sie im Ausland von der Stange gekauft werden konnte. Synthetischer Schaum zum Gewichtsausgleich von Batterien wurde in Finnland von Exel Oyj hergestellt, da 3M, ein führender Hersteller, die Lieferung seiner Produkte unter direkter Berufung auf das Embargo verweigerte. Im Gegensatz zu Bathyscaphe-Schwimmern, wie dem benzingefüllten Trieste-Schwimmer, komprimiert sich der Schaum weniger und es besteht keine Gefahr des Auslaufens. Druckfest in 6 Kilometer Tiefe besteht der Schaum aus Glashohlkugeln mit einem Durchmesser von 0,3 mm, die mit Epoxidharz verbunden sind. Für die Mir-Kugel wurden 8 Kubikmeter Schaumstoff verwendet.
Handeln
Das 200-Millionen-Mark-Projekt „Worlds“ war sowohl für den Hersteller als auch für den Kunden ein lukratives Geschäft und erfolgreicher, als man es sich hätte vorstellen können. Das Projekt erregte keine mediale Aufmerksamkeit und blieb bis zur Auslieferung der fertigen Geräte an den Kunden praktisch ein Geheimnis. Erst danach Rauma-Repola veröffentlichten technischen Daten. Der Ruf des Unternehmens als Hersteller von „Welten“ ist nach wie vor top. Laut Tauno Matomaki sind internationale Konzerne an Tiefsee-Tauchbooten interessiert, die bis zu 12.000 Meter tief tauchen können, und das ist technisch möglich. Ein solcher Apparat ist technisch möglich, politisch nicht. Es kann gekauft werden, aber es ist problematisch zu verkaufen - die Vereinigten Staaten überwachen nach einer Reifenpanne mit den Welten dieses Gebiet sorgfältig, und alle amerikanischen Tiefseefahrzeuge gehören der Militärabteilung.
Design
Rahmen
Die Kugelgondel der Geräte besteht aus martensitischem, hochlegiertem Stahl mit 18 % Nickel. Die Legierung hat eine Streckgrenze von 150 kg/mm2 (Titan hat etwa 79 kg/mm2). Produzent: Finnisches Unternehmen Lokomo, das zum Konzern Rauma Repola gehört.
Powerpoint
Nickel-Cadmium-Batterien 100 kWh.
Unterbringung der Besatzung
Die Besatzung des Mir-Tauchboots besteht aus drei Personen: einem Piloten, einem Ingenieur und einem Wissenschaftler-Beobachter. Beobachter und Ingenieur liegen auf den Seitenbänken, der Pilot sitzt oder kniet in einer Nische vor dem Armaturenbrett.
Rettungssystem
Das Notrettungssystem des Geräts besteht aus einer syntaktischen Boje, die von der Besatzung freigegeben wird, mit einem daran befestigten Kevlar-Kabel, 7000 m lang, entlang dem die Hälfte der Kupplung abgesenkt wird (wie bei einer automatischen Eisenbahnkupplung). Es erreicht das Gerät, dann erfolgt eine automatische Kupplung und das Gerät wird an einem 6500 m langen Stromkabel mit einer Bruchkraft von etwa zehn Tonnen angehoben.
Vergleichende Bewertung
Mit Hilfe von Mir-Tauchbooten wurden hydrothermale Quellen in den Gebieten des Mittelatlantischen Rückens erkundet. Am 2. August 2007 erreichten diese Fahrzeuge zum ersten Mal weltweit den Grund des Arktischen Ozeans am Nordpol, wo die russische Flagge und eine Kapsel mit einer Botschaft an zukünftige Generationen platziert wurden. Die Geräte hielten einem Druck von 430 Atmosphären stand.
Erkundung des Baikalsees
Seit Juli 2008 arbeiten beide Geräte zwei Jahre lang am Baikalsee. An diesem See machten sie ihre ersten Tiefseetauchgänge im Süßwasser.
Am 30. Juli 2008 kollidierte das Tauchboot Mir-2 mit einer schwimmenden Plattform und erlitt Schäden am linken Propeller. Im Jahr 2008 wurden im mittleren und südlichen Becken des Sees 53 Tauchgänge durchgeführt, an denen 72 Hydronauten teilnahmen. Die Art des Auftretens von Ölteppichen auf der Oberfläche des Sees sowie die Fauna des Baikalsees wurden untersucht. Es wurden vier Ebenen alter "Strände" entdeckt, was bedeutet, dass der Baikal allmählich gefüllt wurde. In einer Tiefe von 800 Metern wurden drei Kisten mit Patronen aus dem Bürgerkrieg gefunden, 7 Patronen wurden geborgen. Der russische Premierminister Wladimir Putin tauchte am 1. August 2009 mit dem Tauchboot Mir auf den Grund des Baikalsees.
Aktuellen Zustand
Nach einer Expedition zum Shtokman-Feld im Jahr 2011 wurde das Schiff zur Unterstützung der Mir-Tauchboote, R/V Akademik Mstislav Keldysh, gechartert. Dies war einer der Gründe für die Unmöglichkeit der Teilnahme des Mir-Komplexes an den Arbeiten anlässlich des hundertjährigen Jubiläums des Titanic-Unfalls - die Mir-Fahrzeuge blieben ohne Hilfsschiff.
Im Sommer 2011 wurde die in der Schweiz betriebene Raumsonde Mir erforscht Unterwasserwelt Genfer See. Kurz nach diesem Auftrag wurden die speziell für das Institut für Ozeanologie der Russischen Akademie der Wissenschaften geschaffenen Tiefsee-Tauchboote unter die Kontrolle des Staatlichen Eigentumsausschusses überführt, ihr rechtliches Schicksal ist noch nicht geklärt.