The International Naval Show held at the end of June gave a lot of interesting news. Among them were reports on the developments of Russian specialists in the field of building deep-sea vehicles. The website of the Zvezda TV channel has collected five of the most interesting research and rescue deep-sea vehicles that are used Navy RF. Deep-sea vehicle "Rus" and its upgraded version "Consul" The first deep-sea submersible of the third generation built in Russia was the Rus submersible. For a long time he held the diving record among Russian vehicles. He was able to descend to 6180 meters. The device belongs to the Russian Navy and is designed for research and underwater work. It can perform underwater technical work using a manipulator device, inspect underwater structures and objects, deliver to the ground or lift objects weighing up to 200 kg to the surface. In addition, it can move not only vertically, but also horizontally at a speed of up to 3 knots. on board are: a hydroacoustic complex with antenna devices, a specialized manipulator complex, an outboard television camera in a durable box, and a sound underwater communication station. The device is equipped with a reliable security system. For the first time in the world, shooting of the lower part of the apparatus is envisaged in case of its emergency sticking to the silt or bottom soil. Russian specialists have developed a modernized version of the apparatus, which received the name "Consul" from the words "sulfide nodules". Although the apparatus is similar to the bathyscaphe of the Rus project in terms of its main characteristics, it is intended for conducting geological and geophysical studies of the sea shelf. "Consul" May 14, 2011 was able to sink to a depth of 6270 m. Bathyscaphes "Mir-1" and "Mir-2" Two Russian research deep-sea manned vehicles have made a huge contribution to the study of the world's oceans and Lake Baikal. Bathyscaphes can dive up to 6 km. Currently, the Mir-1 apparatus is on display at the Kaliningrad Museum of the World Ocean, and Mir-2 is based on board the research vessel Akademik Mstislav Keldysh.  "Worlds" were used during the expedition to the sunken nuclear submarine "Komsomolets". Then the submersibles sank 70 times to a depth of 1,700 m. Atlantic, Pacific and Indian oceans, and on August 2, 2007, for the first time in the world, the bottom of the Arctic Ocean at the North Pole was reached, where the Russian flag and a capsule with a message to future generations were placed. AS-30 The Russian Navy uses Project 1855 deep-sea submersibles code "Priz". One of the most modern submersibles in this series is the AS-30 submersible. It recently underwent modernization, during which obsolete special equipment was completely replaced with digital generation systems. Unlike the Mirs, this apparatus does not include scientific and oceanographic research, it is designed to rescue crews from emergency submarines by docking submarine emergency exits.
"Worlds" were used during the expedition to the sunken nuclear submarine "Komsomolets". Then the submersibles sank 70 times to a depth of 1,700 m. Atlantic, Pacific and Indian oceans, and on August 2, 2007, for the first time in the world, the bottom of the Arctic Ocean at the North Pole was reached, where the Russian flag and a capsule with a message to future generations were placed. AS-30 The Russian Navy uses Project 1855 deep-sea submersibles code "Priz". One of the most modern submersibles in this series is the AS-30 submersible. It recently underwent modernization, during which obsolete special equipment was completely replaced with digital generation systems. Unlike the Mirs, this apparatus does not include scientific and oceanographic research, it is designed to rescue crews from emergency submarines by docking submarine emergency exits.  Experts consider the devices of this project to be the most effective rescue devices in the Russian fleet. The device was equipped with cameras, manipulators capable of cutting metal cables with a diameter of up to 10 mm, conducting underwater welding, tightening and unscrewing nuts. It has a special device for docking with the submarine's coaming platform, through which submariners leave the emergency submarine. AS-34 Another unit of this series AS-34 is in the ranks of the Russian Navy. It is located on board the rescue vessel Georgy Titov. The modernization, which the AC-34 has recently undergone, has made it possible to extend the service life of the bathyscaphe until 2032.
Experts consider the devices of this project to be the most effective rescue devices in the Russian fleet. The device was equipped with cameras, manipulators capable of cutting metal cables with a diameter of up to 10 mm, conducting underwater welding, tightening and unscrewing nuts. It has a special device for docking with the submarine's coaming platform, through which submariners leave the emergency submarine. AS-34 Another unit of this series AS-34 is in the ranks of the Russian Navy. It is located on board the rescue vessel Georgy Titov. The modernization, which the AC-34 has recently undergone, has made it possible to extend the service life of the bathyscaphe until 2032.  The hull of the rescue vessel is made of titanium. And although the working depth of the SGA is 500 meters, but if necessary, the device can descend to a depth of 1000 meters and evacuate submariners from an emergency boat with increased smoke and high pressure. The second compartment AS-34 is used as a pressure chamber. This unit can take on board up to 20 divers. Usually the crew of a bathyscaphe is three people. The supply of oxygen for the work of three people is designed for 120 hours. On the situation with rescued people - for 10 hours. Bester-1 Another newest deep-sea rescue vehicle is the AS-40 Bester-1. Last year, he took up combat duty in Vladivostok. The unique submersible, superior to foreign analogues, is capable of dry evacuating the crew of a submarine in distress from a depth of more than 700 meters. It is on board the Igor Belousov, the lead rescue vessel of the Pacific Fleet, which has no seaworthiness restrictions.
The hull of the rescue vessel is made of titanium. And although the working depth of the SGA is 500 meters, but if necessary, the device can descend to a depth of 1000 meters and evacuate submariners from an emergency boat with increased smoke and high pressure. The second compartment AS-34 is used as a pressure chamber. This unit can take on board up to 20 divers. Usually the crew of a bathyscaphe is three people. The supply of oxygen for the work of three people is designed for 120 hours. On the situation with rescued people - for 10 hours. Bester-1 Another newest deep-sea rescue vehicle is the AS-40 Bester-1. Last year, he took up combat duty in Vladivostok. The unique submersible, superior to foreign analogues, is capable of dry evacuating the crew of a submarine in distress from a depth of more than 700 meters. It is on board the Igor Belousov, the lead rescue vessel of the Pacific Fleet, which has no seaworthiness restrictions.  A distinctive feature of "Bester" is also that it can quickly become mobile. According to experts, the device can be used not only from the board of the Igor Belousov, but also from other rescue ships, after it is promptly transferred by a cargo plane to any of the fleets.
A distinctive feature of "Bester" is also that it can quickly become mobile. According to experts, the device can be used not only from the board of the Igor Belousov, but also from other rescue ships, after it is promptly transferred by a cargo plane to any of the fleets.
(GOA) for ocean research and rescue operations.
The fleet of the Institute of Oceanology of the Russian Academy of Sciences named after Pyotr Shirshov includes two deep-sea manned submersibles of the Mir type: GOA Mir 1 and Mir 2. They were built in Finland by Rauma Repola in 1987. The devices were created under the scientific and technical guidance of scientists and engineers of the Institute of Oceanology of the Russian Academy of Sciences. The creation of the devices was started in May 1985 and completed in November 1987. In December 1987, deep-sea tests of vehicles were carried out in the Atlantic at a depth of 6170 meters ("Mir 1") and 6120 meters ("Mir 2"). The devices were installed on the support vessel "Akademik Mstislav Keldysh", built in 1981 in Finland and re-equipped in 1987 to carry out work with deep-sea testing devices.
GOA "Mir 1" and "Mir 2" are identical in design and designed for an operating depth of immersion of 6000 m. Total capacity batteries one apparatus is 100 kW / h, which allows you to perform underwater operations for 17 20 hours of continuous underwater cycle. In addition, this makes it possible to install a large complex of scientific and navigational equipment on both vehicles.
Deep-sea manned submersibles "Mir-1" and "Mir-2"
The Mir-1 and Mir-2 deep-sea manned submersibles were built in Finland by the Rauma Repola company according to a joint Soviet-Finnish project. The construction of the vehicles began in May 1985 and ended in November 1987. In December 1987, the vehicles were tested in the Atlantic Ocean at depths of 6170 m and 6120 m, respectively. During 20 years of operation, Mir submersibles performed a wide range of deep-water operations. There has been a large amount of scientific research in various regions of the oceans. The main direction of research was the study of hydrothermal fields at the bottom of the ocean. The devices worked in 20 areas with hydrothermal fields in the Pacific, Atlantic and Arctic oceans. A large amount of archaeological research has been carried out on sunken objects such as the Titanic (3500 m), Bismarck (4700 m), the Japanese submarine of the Second World War I-52 (5400 m) and others. With the help of the devices, deep-sea film and video recordings were made for feature and popular science films. More than 10 films were released, the most famous of which is the famous "Titanic" by James Cameron.
A special place in the history of the Mirs is occupied by work on the sunken nuclear submarines Komsomolets and Kursk, during the examination of which a wide range of scientific and underwater technical problems were solved. To date, each of the Mir submersibles has made more than 400 dives, 70% of which were made to depths between 3000 and 6000 m. The submersibles have proven to be highly reliable technical means capable of solving almost any problem in the depths of the ocean. However, to date, the Mir spacecraft have never operated under a continuous ice cover. Of course, the solution of this problem required both some modernization of the apparatus and the development of new equipment that would allow such dives to be carried out successfully. Before proceeding to the presentation of the material on diving at the North Pole, it is advisable to consider issues related to the design features of the Mirs and those innovations that were introduced to perform the very difficult task of descending to the bottom North Pole. Many foreign experts call deep-sea manned submersibles minisubmarines. Obviously, this is due to some of their similarities with large submarines both in design and in the method of operation - in the mode of free navigation under water without rigid or flexible connections (such as cables or cables) with the surface or with the support vessel. The safety of a person's stay at great depths is ensured primarily by a strong body; the remaining elements and systems of the apparatus are designed to deliver a durable body to a given depth, move under water and return back to the surface. Batteries are used as an energy source in most modern GOA. The rugged body, individual structural elements and basic components of the systems are combined by a connecting frame into a single structure, which is closed on top with a light body, which is usually made of fiberglass and gives the device a streamlined shape. This is the general design scheme of the habitable vehicle.
The design of the deep-sea manned submersible "Mir"
immersion depth 6000 m
crew 3 people
speed 5 knots
weight 18.6 t
dimensions 7.8 x 3.2 x 3.0 m

1 habitable sphere
2 light body
3 ballast spheres
4 manipulators
5 retractable instrument rods
6 powerful lamps
7 television, photo cameras on a rotary device
8 supporting skis
9 nickel shot bin (emergency ballast)
10 side engine
11 high pressure ballast water pump
12 hydraulic station with electric drive
13 boxes with 120 volt batteries
14 boxes with 24 volt batteries
15 main engine
16 main engine nozzle
17 wing
18 emergency buoy
From the book of A.M.Sagalevich "Depth". " scientific world", 2002
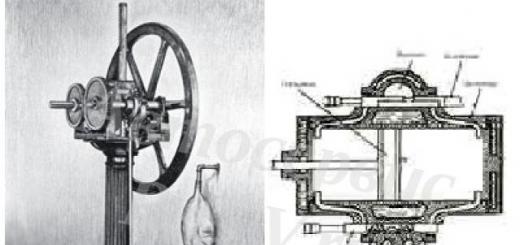
It should be noted that very often deep-sea manned vehicles are called bathyscaphes. However, this is not true. Bathyscaphes were the first generation of autonomous habitable vehicles. On bathyscaphes, a light liquid, gasoline, was used as a floating material. The bathyscaphe had a huge float, into which up to 200 tons of gasoline was pumped before diving, which was replaced by water during the dive and the bathyscaphe acquired negative buoyancy. At the end of the work at the bottom, solid ballast (usually steel shot) was dropped from the bathyscaphe, and it began to float. In deep-sea habitable submersibles, a solid floating material syntactic is used as a floating material, the basis of which is glass microballoons, connected by epoxy resin into a single whole. Syntactic is made in the form of blocks, they can be given a different shape during casting. Thanks to the use of GOA syntactics, they are small in size and weight and can be transported to the dive site on board research vessels. To date, there are only four GOAs in the world that can dive to a depth of 6000 m: one in France (Nautilus), one in Japan (Shinkai-6.5) and two in Russia - Mir-1 and " Mir-2". Let us briefly consider the design of the Mir devices. The robust housing of the Mir submersible is made of steel with a high nickel content. Two hemispheres, made by casting and machined, are connected with bolts. The sphere has three portholes: a central one, with an inner diameter of 200 mm, and two side windows, with a diameter of 120 mm. Portholes provide good review when working underwater. Nickel-cadmium batteries are used as an energy source, which replaced the originally used iron-nickel batteries. The total energy reserve of the Mir apparatus is 100 kW/h. The device has three ballast systems.

The main ballast system consists of two tanks made of fiberglass. Their total capacity is 1500 liters. When the apparatus is immersed, the containers are filled with water, due to which its buoyancy becomes close to neutral. Further ballasting is carried out using a thin ballast system, which allows you to adjust buoyancy over a wide range, making it possible to sink and emerge at a speed of up to 35–40 m/min and hover at any horizon in the water column. When surfacing, the tanks of the main ballast system are purged with air, giving the vehicle a buoyancy of +1500 kg and ensuring a normal waterline on the wave. The fine ballasting system consists of three solid spheres - two fore and one aft - with a total capacity of 999 liters. During the immersion of the apparatus in these spheres, water is taken in, which allows you to adjust its buoyancy. To give the apparatus positive buoyancy, water is pumped out of the solid spheres using special high-pressure pumps.

Thus, the Mir submersibles operate entirely on water ballast, in contrast to foreign deep-sea submersibles, which continue to partially use the principles of bathyscaphes, i.e., the discharge of solid ballast in the form of cast iron ingots or sandbags. The high pressure pumps are hydraulically driven. The devices have three hydraulic systems. The first one, with a power of 15 kW, controls the main high-pressure pump and the vehicle's propulsion system. The energy of the batteries is converted using a special inverter into AC energy, which feeds the electric motor - the drive of the hydraulic pump. The high-pressure pump and the propulsion system are controlled through a system of valves located outside in an oil box and controlled by the pilot from inside the habitable sphere. The second hydraulic system is arranged in a similar way, but has a lower power - 5 kW. It controls all external retractable devices: manipulators, rods, bunkers, etc., a trim pump that pumps water ballast from the bow to the stern and back, thereby providing the desired trim angle of the apparatus. In addition, the second hydraulic system controls the second high-pressure pump, which is used as an emergency: in the event of a failure of the main pump or the first hydraulic system, the second pump allows you to pump out the ballast water and ensure the ascent of the vehicle to the surface. The third hydraulic system is emergency, it makes it possible to reset some parts of the apparatus in case of an emergency. The hydraulic pump in this system is driven by a DC electric motor, which is powered directly from the main batteries of the device or from an emergency battery. It should be noted that the discharge of individual elements of the apparatus in the event of an emergency can also be carried out from the second hydraulic system. The following items can be dropped from the Mir device.

First of all, these are the protruding parts of the structure (with which the apparatus can catch on the bottom of cables, cables, etc.): the main and side movers; wing; manipulator brushes (in case something is taken into the brush, and the mechanism of its unclenching does not work); an emergency buoy that, after recoil from the device, comes to the surface on a thin nylon cable 8000 meters long; in addition, the bottom battery box of the main battery weighing about 1000 kg can be dropped. The Mir vehicles also have an emergency ballast system (mentioned above as the third ballast system). Two rigid fiberglass containers contain 300 kg of nickel shot held by electromagnets, the removal of voltage from which allows the shot to be partially or completely released and give the device positive buoyancy. An important part of the vehicles is the propulsion system. The main stern thruster with a power of 12 kW controls the movement in the horizontal plane, providing turns of the vehicle within ±60°. Two side thrusters with a power of 3.5 kW each have a rotary device that allows them to be rotated in a vertical plane within 180 °; due to this, it is possible to carry out the vertical movement of the apparatus during its forward movement on the main mover, as well as in the horizontal plane in case of failure of the main mover. Such a device of the complex provides flexible control of the vehicle, giving it good maneuverability, which is very important when working near the bottom in difficult terrain or on bottom objects of complex configuration. Inside the habitable sphere during the dive, normal Atmosphere pressure and gas composition of the air. The life support system includes oxygen cylinders with dispensers through which the atmosphere inside the sphere is replenished with oxygen, and a collection carbon dioxide with replaceable cassettes filled with a CO 2 absorber (usually lithium or potassium oxide hydrate). Fans constantly drive air through a carbon dioxide absorber, as well as through a special filter of harmful impurities filled with activated carbon and palladium. Thus, the atmosphere in the cabin is cleaned. Control over the content of various components in it is carried out using special indicators showing the percentage of oxygen, dioxide and carbon monoxide in the atmosphere. There are also pressure, temperature and humidity monitors inside the cabin. GOA "Mir" are equipped with modern means underwater navigation. It allows you to determine the exact position of the device under water relative to bottom hydroacoustic beacons, the setting and calibration of which is carried out on board the vessel according to the data of the satellite navigation system. The pilot can observe the trajectory of the submersible movement under water on the display, which creates undoubted convenience in controlling it during search operations, reaching bottom objects, etc. The underwater hydroacoustic communication system provides wireless voice communication with the vessel at a distance of up to 10 miles. Sonar means allow you to search at the bottom of small objects up to a few tens of centimeters in size. The devices are equipped with hydrophysical and hydrochemical sensors, special sampling devices and other scientific equipment. Two identical manipulators (right and left) with seven degrees of freedom make it possible to take various samples - from very fragile to large and heavy weighing about 80 kg. The Mir submersibles are equipped with modern video equipment for underwater video filming, as well as underwater photo systems. The devices are equipped with external light and radio beacons, which allow them to be detected on the surface after surfacing: the radio search system on the support vessel receives signals from the radio beacon and indicates the direction to the surface point of the device. Diving at the North Pole under a continuous ice cover required special training"Mir" vehicles: modernization of some systems, development of new equipment that would ensure the exit of the GOA from under the ice roof to a small opening on the surface of the ocean.
"Mir" is a series of Russian research underwater deep-sea manned vehicles (GOA) for oceanographic research and rescue operations.
They have a diving depth of up to 6 km. based on board research vessel "Akademik Mstislav Keldysh".
History As of 2008, the fleet of the Institute of Oceanology of the Russian Academy of Sciences has two Mir-type deep-sea manned submersibles: MIR-1 and MIR-2 submersibles.
They were built in Finland at the company "Rauma-Repola" in 1987, under the scientific and technical guidance of scientists and engineers of the IORAN named after. P. P. Shirshova.
The design of the GOA was started in May 1985 and completed with the construction of the vehicles in November 1987, and already in December 1987 factory deep-sea tests of the vehicles were carried out in the Atlantic Ocean.
The immersion depth was 6170 m for MIR-1 and 6120 m for MIR-2. The carrier ship of the GOA is the Akademik Mstislav Keldysh, built in 1981 in Finland and converted in 1987 into a support vessel. Between 1987 and 1991, 35 expeditions to the Atlantic, Pacific and Indian Oceans were carried out using the Mir-1 and Mir-2 submersibles.
The devices were used in the filming of James Cameron's films "Titanic", "Ghosts of the Abyss: Titanic" in 1997 and The Bismarck Expedition in 2002.
With the help of Mir submersibles, hydrothermal springs were explored in the areas of the Mid-Atlantic Ridge, and the sunken submarine Komsomolets was also examined. Seven expeditions were carried out in the area of the death of the nuclear submarine "Komsomolets" in the Norwegian Sea in the period 1989-1998. At the end of September 2000, the devices were used to survey the Kursk nuclear submarine.
Both the ship "Akademik Mstislav Keldysh" and the underwater vehicles belong to the Institute of Oceanology named after A.I. P. P. Shirshov RAS.
The idea of apparatuses and initial project were worked out in the Academy of Sciences of the USSR and KB "Lazurit". Deep-sea submersibles were manufactured in 1987 by the Finnish company Rauma Repola. The ship "Akademik Mstislav Keldysh" was built in 1981 at the Finnish shipyard Hollming in the city of Rauma.
On August 2, 2007, these devices reached the bottom of the Arctic Ocean at the North Pole for the first time in the world, where the Russian flag and a capsule with a message to future generations were placed. The devices withstood a pressure of 430 atmospheres.
Design
The body of the devices is made of martensitic, highly alloyed steel, with 18% nickel. The alloy has a yield strength of 150 kg per square mm (titanium has about 79 kg / sq. mm). Producer: Finnish company Lokomo, which is part of the Rauma Repola concern. Crew accommodation The crew of the Mir submersible consists of three people - a pilot, an engineer and a scientist-observer.
rescue system
The emergency rescue system of the apparatus consists of a syntactic buoy, released by the crew, with a Kevlar cable attached to it, 7000 m long, along which half of the coupler is lowered (the same as a railway automatic coupler).
It reaches the device, then an automatic hitch occurs, and the device is lifted on a long power cable, 6500 m long, with a breaking force of about ten tons.
Comparative evaluation
As of 2008, in addition to the Russian Mir-1 and Mir-2, there are two more devices in the world (three were built). The American Sea Cliff (eng. DSV Sea Cliff), which is currently being converted, the French Nautile (fr. Nautile), both with a diving depth of 6000 meters, and the Japanese Shinkai 6500 (Shinkai 6500), which set a dive record for existing devices at 6527 meters.
Baikal exploration
Since July 2008, both devices have been on Lake Baikal. On this lake they made their first deep dives in fresh water. It is planned that the expedition will continue in 2009, during which 100 dives will be completed.
On July 30, 2008, the Mir-2 submersible collided with a floating platform and suffered damage to the left propeller.
In 2008, 53 dives were made in the middle and southern basins of the lake, in which 72 hydronauts took part. The nature of the appearance of oil slicks on the surface of the lake was investigated, animal world.
Four levels of ancient "beaches" have been discovered, which means that Baikal was filled gradually. At a depth of 800 meters, three boxes with cartridges from the times civil war, 7 rounds were raised.
Russian Prime Minister Vladimir Putin made a dive to the bottom of Lake Baikal on the Mir submersible on August 1, 2009.
Notable commanders
Anatoly Sagalevich
Chernyaev Evgeny Sergeevich
Carriage sphere inner diameter =2.1 m
General
The idea of the devices and the initial design were worked out in the Academy of Sciences of the USSR and KB "Lazurit". Deep-sea submersibles were manufactured in 1987 by the Finnish company Rauma Repola. The base ship, the ship " Akademik Mstislav Keldysh" was built in 1981 at the Finnish shipyard Hollming in the city of Rauma. In 1987, the Mir-1 and Mir-2 GOA were installed on the base ship and put into operation. Thus, a unique research complex was created, equipped with modern precision scientific and navigational equipment and instruments for conducting a wide range of oceanological research. Both the ship "Akademik Mstislav Keldysh" and the underwater vehicles belong.
"Worlds" gave rise to a new direction in scientific study ocean. The research complex that combines the vessel and the Mir submersible has no analogues in the world. The integrated data acquisition system, which combines a variety of measuring equipment and computing facilities of 15 laboratories, makes it possible to automatically collect, process and record atmospheric data, aquatic environment and bottom soil. Great value for scientific research has a unique working depth of "Worlds" - 6000 meters.
History
The history of the Mirs begins in the early 1980s, when the USSR Academy of Sciences decided to get at its disposal devices for deep-sea research. The first attempts to order underwater vehicles were unsuccessful: joint work with a Canadian company in 1980 faced a number of technical problems - it was not possible to create a chamber for the crew that can withstand 600 bar of titanium, and above all political obstacles: the United States saw in such an order a violation of the ban treaty by COCOM export of advanced technologies to the USSR. In 1982, the USSR Academy of Sciences offered an order to three other possible manufacturers. When the Swedish and French enterprises refused the offer, the company remained Rauma-Repola with its subsidiary oceanics- Finland did not sign an agreement banning the export of advanced technologies to the USSR. The peace treaty prohibited the ownership and construction of submarines, but this paragraph only applied to military equipment, and the ordered devices were research. According to Pekka Laxella, then head of the Finnish company, permission to export to the USSR was obtained only because KOCOM officials did not believe that anything would come of such an undertaking. When it became clear that the engineering problems had been solved, there was a fuss about how such technologies could be sold to the USSR, and Laksell had to visit the Pentagon several times.
Diplomatic crisis with the USA
The US Embassy in Helsinki has been aware of the development of the Rauma Repola deep-sea chambers from the very beginning. “They still had a technically illiterate group that could not evaluate the project correctly. The project was allowed to continue - the Americans were absolutely sure that casting a sphere from steel would fail. All previous spheres were welded from titanium,” said the former CEO in 2003 Rauma-Repola Tauno Matomyaki. "We created an enterprise Rauma-Repola Oceanics Oy Tauno Matomyaki said at the same time, “only in order to sacrifice this subsidiary, and not endanger the entire company if things go wrong.” And so it happened. The subsidiary was created in 1983, and dissolved shortly after the creation of Worlds in 1987. Having gained wide popularity, the firm Rauma-Repola did not receive the expected orders. The entrance ticket to the new area turned out to be too expensive - the CIA and the Pentagon insisted that all enterprises that do not adhere to American recommendations are subject to bankruptcy without exception.
The United States tried to secretly prevent the export of ready-made devices to the USSR. The CIA suspected that the devices could be used in US territorial waters for reconnaissance.
President Mauno Koivisto recounts in a memoir that the US embassy said threateningly that Finnish firms might not get approval for dozens of licenses if Soviet Union get the devices. Then-Vice President George W. Bush wrote a letter to Koivisto in which he suspected Rauma-Repol's activities of endangering world security. In his response, Koivisto stated that, according to the laws of the country, he had no opportunity to interfere in the affairs of a private company if it did not violate the laws. In addition, he stressed that trade with the USSR is monitored especially carefully.
Under pressure from the CIA and the Pentagon Rauma-Repola was forced to abandon the creation of deep-sea vehicles and the promising development of marine technology. Such devices are needed in the construction and maintenance of oil platforms. One abandoned project was the development of fuel cells. Firm Rauma-Repola abandoned the manufacture of oil platforms and is now mainly engaged in wood processing. Rauma-Repola was then the sixth largest concern in Finland and employed 18,000 people. Now her business in the field of metalworking is continued by the concern Metso .
Design and manufacture
Manufacturing of apparatus spheres that can withstand high pressure, was the merit of the company's engineers Repola and applications new technology. This was possible thanks to the hard work of the entire design team and the high level of metallurgy. The firm signed the contract before the final technology was known and took the risk from both a technical and commercial standpoint. A German patent has been applied for the processing technology, but has not yet been approved.
Two-meter spheres of the crew for deep-sea vehicles should be as light as possible so that the density of the entire apparatus is close to unity - the density of water. Then the device can be controlled autonomously at any depth. In practice, this means that the sphere must be made of a particularly strong and light metal. Titanium is good for its low density, but its fracture strength is still less than that of steel. Therefore, titanium walls should be twice as thick as steel. Titanium also cannot be cast in such large pieces to assemble a sphere without the use of welding.
Rauma-Repola immediately took the path of creating a steel sphere - the company had suitable foundry equipment at the Lokomo enterprise. The material chosen was maragen steel (maragen), developed in the 1960s by the US Navy, whose strength/density ratio is 10% better than that of titanium. The alloy contains almost a third of cobalt, nickel, chromium and titanium additives. The proportion of titanium is decisive for the impact strength. This steel is commonly used to build vehicle shafts.
By connecting the two hemispheres with bolts, welding and the related problems of the effect of heat on strength were completely avoided. The American export ban could not prevent the manufacture of devices, but it caused various obstacles and extra costs to the project. For example, the electronics of the devices was designed and built by Hollming, although it could be bought off-the-shelf from abroad. Synthetic foam for weight compensation of batteries was produced in Finland by Exel Oyj, as 3M, a leading manufacturer, refused to supply its products, directly citing the embargo. Unlike bathyscaphe floats, such as the gasoline-filled Trieste float, the foam compresses less and there is no risk of leakage. Pressure-resistant at a depth of 6 kilometers, the foam consists of hollow glass beads with a diameter of 0.3 mm, bonded with epoxy resin. 8 cubic meters of foam were used for the Mir sphere.
Deal
The 200 million mark "Worlds" project was a lucrative deal for both the manufacturer and the customer, and was more successful than anyone could have imagined. The project did not attract the attention of the media and practically remained a secret until the delivery of the finished devices to the customer. Only after that Rauma-Repola published technical data. The reputation of the company as a manufacturer of "Worlds" is still on top. According to Tauno Matomaki, international concerns are interested in deep-sea submersibles capable of diving to 12,000 meters, and this is technically possible. Such an apparatus is technically possible, politically not. It can be bought, but it is problematic to sell - the United States, after a puncture with the Worlds, carefully monitors this area, and all American deep-sea vehicles belong to the military department.
Design
Frame
The spherical gondola of the devices is made of martensitic, highly alloyed steel, with 18% nickel. The alloy has a yield strength of 150 kg/mm2 (titanium has about 79 kg/mm2). Producer: Finnish company Lokomo, which is part of the Rauma Repola concern.
Power point
Nickel-cadmium batteries 100 kWh.
Crew accommodation
The Mir submersible crew consists of three people: a pilot, an engineer and a scientist-observer. The observer and engineer lie on the side benches, the pilot sits or kneels in a niche in front of the dashboard.
rescue system
The emergency rescue system of the apparatus consists of a syntactic buoy, released by the crew, with a Kevlar cable attached to it, 7000 m long, along which half of the coupler is lowered (the same as a railway automatic coupler). It reaches the device, then an automatic hitch occurs, and the device is lifted on a long power cable, 6500 m long, with a breaking force of about ten tons.
Comparative evaluation
With the help of Mir submersibles, hydrothermal springs were explored in the areas of the Mid-Atlantic Ridge. On August 2, 2007, these devices reached the bottom of the Arctic Ocean at the North Pole for the first time in the world, where the Russian flag and a capsule with a message to future generations were placed. The devices withstood a pressure of 430 atmospheres.
Baikal exploration
Since July 2008, both devices have been working on Lake Baikal for two years. On this lake they made their first deep-sea dives in fresh water.
On July 30, 2008, the Mir-2 submersible collided with a floating platform and suffered damage to the left propeller. In 2008, 53 dives were made in the middle and southern basins of the lake, in which 72 hydronauts took part. The nature of the appearance of oil slicks on the surface of the lake, as well as the fauna of Baikal, were studied. Four levels of ancient "beaches" have been discovered, which means that Baikal was filled gradually. At a depth of 800 meters, three boxes of cartridges from the Civil War were found, 7 cartridges were recovered. Russian Prime Minister Vladimir Putin made a dive to the bottom of Lake Baikal on the Mir submersible on August 1, 2009.
Current state
After an expedition to the Shtokman field in 2011, the vessel providing support for the Mir submersibles, R/V Akademik Mstislav Keldysh, was chartered. This was one of the reasons for the impossibility of the participation of the Mir complex in the work on the occasion of the centennial anniversary of the Titanic accident - the Mir vehicles were left without a support vessel.
In the summer of 2011, the Mir spacecraft operated in Switzerland, researched undersea world Lake Geneva. Shortly after this assignment, deep-sea submersibles, created specifically for the Institute of Oceanology of the Russian Academy of Sciences, were transferred under the control of the State Property Committee, their legal fate has not yet been determined.