– general equation planes in space
Normal plane vector
A normal vector of a plane is a nonzero vector orthogonal to each vector lying in the plane.
Equation of a plane passing through a point with a given normal vector
is the equation of the plane passing through the point M0 with a given normal vector
Plane direction vectors
Two non-collinear vectors parallel to the plane are called direction vectors of the plane
Parametric plane equations
![]() – parametric equation of the plane in vector form
– parametric equation of the plane in vector form
 is the parametric equation of the plane in coordinates
is the parametric equation of the plane in coordinates
Equation of a plane through a given point and two direction vectors
-fixed point
just a dot lol
are coplanar, which means they mixed product equals 0.

Equation of a plane passing through three given points
 – plane equation through three points
– plane equation through three points
Equation of a plane in segments
- plane equation in segments
Proof
To prove it, we use the fact that our plane passes through A, B, C, and the normal vector

Let us substitute the coordinates of the point and the vector n into the equation of the plane with the normal vector
Divide everything by and get
So it goes.
Normal plane equation
is the angle between ox and the normal vector to the plane, coming out of O.
is the angle between oy and the normal vector to the plane, outgoing from O.
is the angle between oz and the normal vector to the plane, outgoing from O.
is the distance from the origin of coordinates to the plane.
Evidence or some such bullshit
![]()
The sign is opposite D.
Similarly for other cosines. End.
Distance from point to plane
Point S, plane
is the oriented distance from the point S to the plane
If , then S and O lie on opposite sides of the plane
If , then S and O lie on the same side
Multiply by n 
![]()
Mutual arrangement of two lines in space
Angle between planes
At the intersection, two pairs of vertical dihedral angles are formed, the smallest is called the angle between the planes
Straight line in space
A line in space can be given as
Intersection of two planes:
![]()
![]()
Parametric equations of a straight line
- parametric equation of a straight line in vector form
is the parametric equation of a straight line in coordinates
Canonical Equation
![]() is the canonical equation of a straight line.
is the canonical equation of a straight line.
Equation of a straight line passing through two given points
![]()
![]() – canonical equation of a straight line in vector form;
– canonical equation of a straight line in vector form;
Mutual arrangement of two lines in space
Mutual arrangement of a straight line and a plane in space
Angle between line and plane
Distance from a point to a line in space
a is the direction vector of our straight line.
is an arbitrary point belonging to a given line
- the point to which we are looking for the distance.
Distance between two intersecting lines
Distance between two parallel lines
M1 - point belonging to the first line
M2 is a point belonging to the second line
![]()
Curves and surfaces of the second order
An ellipse is a set of points in a plane, the sum of the distances from which to two given points(foci) is a constant value.
Canonical equation of an ellipse



Let's replace it with
![]()
Divide by
Ellipse Properties
Intersection with coordinate axes
Origins
Symmetry about
An ellipse is a curve lying in a limited part of a plane
An ellipse can be obtained from a circle by stretching or squeezing it
Parametric equation of an ellipse:
- directors
Hyperbola
A hyperbola is a set of points in a plane for which the modulus of the difference in distances to 2 given points (foci) is a constant value (2a)

We do everything the same as with the ellipse, we get
Replace with
Divide by
Properties of a hyperbola
;
![]()
- directors
Asymptote
An asymptote is a straight line to which the curve approaches indefinitely, receding to infinity.
Parabola

parabot properties
Relationship between ellipse, hyperbola and parabola.
The relationship between these curves has an algebraic explanation: they are all given by equations of the second degree. In any coordinate system, the equations of these curves have the form: ax 2 +bxy+cy 2 +dx+ey+f=0, where a, b, c, d, e, f are numbers
Transforming Rectangular Cartesian Coordinate Systems
Parallel translation of the coordinate system
![]()
–O’ in the old coordinate system
– coordinates of the point in the old coordinate system
– coordinates of the point in the new coordinate system
Point coordinates in the new coordinate system.
Rotate in a Cartesian Coordinate System
– new coordinate system
![]()
Transition matrix from the old basis to the new one
![]() - (under the first column I’
, under the second j’
) the transition matrix from the basis I,j to basis I’
,j’
- (under the first column I’
, under the second j’
) the transition matrix from the basis I,j to basis I’
,j’
![]()
![]()
General case
Coordinate system rotation
Coordinate system rotation
Parallel translation of the origin
1 option
Option 2
General equation of second order lines and its reduction to canonical form
– general form second order curve equations
Classification of curves of the second order
Ellipsoid
![]()
Cross sections of an ellipsoid
- ellipse
- ellipse
![]()
![]()
Ellipsoids of revolution
Ellipsoids of revolution are either oblate or prolate spheroids, depending on what we are rotating around.
One-band hyperboloid
![]()

Sections of a one-strip hyperboloid
– hyperbola with real axis oy
is a hyperbola with a real x-axis
![]()
It turns out an ellipse for any h. So it goes.
Single-strip hyperboloids of revolution
A one-sheeted hyperboloid of revolution can be obtained by rotating a hyperbola around its imaginary axis.
Two-sheeted hyperboloid
![]()
Sections of a two-sheeted hyperboloid 
- hyperbole with action. axisoz
is a hyperbola with real axis oz
![]()
Cone 
![]()
- a pair of intersecting lines
- a pair of intersecting lines
Elliptical paraboloid 
![]() - parabola
- parabola
- parabola
Rotations
If , then the elliptic paraboloid is a surface of revolution formed by the rotation of the parabola about its axis of symmetry.
Hyperbolic paraboloid

Parabola
- parabola
h>0 hyperbola with real axis parallel to x
h<0 гипербола с действительной осью паралльной оу и мнимой ох
Under the cylinder we mean the surface that will be obtained when a straight line moves in space, which does not change its direction, if the straight line moves relative to oz, then the equation of the cylinder is the equation of a section by the plane xoy.
Elliptical cylinder

hyperbolic cylinder

parabolic cylinder

Rectilinear generators of surfaces of the second order
Lines lying completely on the surface are called rectilinear generators of the surface.
![]()
![]()


Surfaces of revolution
Fuck you lol
Display
by displaying Let's call the rule according to which each element of set A is associated with one or more elements of set B. If each is assigned a single element of the set B, then the mapping is called unambiguous, otherwise ambiguous.
Transformation set is called a one-to-one mapping of a set onto itself
Injection
Injection or one-to-one mapping of set A to set B
(different elements of a correspond to different elements of B) for example y=x^2

surjection
Surjection or mapping of a set A onto a set B
For every B, there is at least one A (for example, a sine)

Each element of set B corresponds to only one element of set A. (for example, y=x)
Any equation of the first degree with respect to coordinates x, y, z
Ax + By + Cz +D = 0 (3.1)
defines a plane, and vice versa: any plane can be represented by equation (3.1), which is called plane equation.
Vector n(A, B, C) orthogonal to the plane is called normal vector planes. In equation (3.1), the coefficients A, B, C are not equal to 0 at the same time.
Special cases of equation (3.1):
1. D = 0, Ax+By+Cz = 0 - the plane passes through the origin.
2. C = 0, Ax+By+D = 0 - the plane is parallel to the Oz axis.
3. C = D = 0, Ax + By = 0 - the plane passes through the Oz axis.
4. B = C = 0, Ax + D = 0 - the plane is parallel to the Oyz plane.
Coordinate plane equations: x = 0, y = 0, z = 0.
A straight line in space can be given:
1) as a line of intersection of two planes, i.e. system of equations:
A 1 x + B 1 y + C 1 z + D 1 = 0, A 2 x + B 2 y + C 2 z + D 2 = 0; (3.2)
2) its two points M 1 (x 1, y 1, z 1) and M 2 (x 2, y 2, z 2), then the straight line passing through them is given by the equations:
3) the point M 1 (x 1 , y 1 , z 1) belonging to it, and the vector a(m, n, p), s collinear. Then the straight line is determined by the equations:
Equations (3.4) are called canonical equations of the line.
Vector a called guide vector straight.
Parametric equations of a straight line we obtain by equating each of the relations (3.4) with the parameter t:
x \u003d x 1 + mt, y \u003d y 1 + nt, z \u003d z 1 + p t. (3.5)
Solving system (3.2) as a system of linear equations in unknowns x and y, we arrive at the equations of the straight line in projections or to reduced straight line equations :
x = mz + a, y = nz + b. (3.6)
From equations (3.6) one can pass to the canonical equations, finding z from each equation and equating the resulting values:
One can pass from general equations (3.2) to canonical equations in another way, if one finds any point of this line and its direction vector n= [n 1 , n 2], where n 1 (A 1 , B 1 , C 1) and n 2 (A 2 , B 2 , C 2) - normal vectors of the given planes. If one of the denominators m,n or R in equations (3.4) turns out to be equal to zero, then the numerator of the corresponding fraction must be set equal to zero, i.e. system
is equivalent to the system ; such a line is perpendicular to the x-axis.
The system is equivalent to the system x = x 1 , y = y 1 ; the straight line is parallel to the Oz axis.
Example 1.15. Write the equation of the plane, knowing that the point A (1, -1,3) serves as the base of the perpendicular drawn from the origin to this plane.
Decision. By the condition of the problem, the vector OA(1,-1,3) is a normal vector of the plane, then its equation can be written as
x-y+3z+D=0. Substituting the coordinates of the point A(1,-1,3) belonging to the plane, we find D: 1-(-1)+3 × 3+D = 0 Þ D = -11. So x-y+3z-11=0.
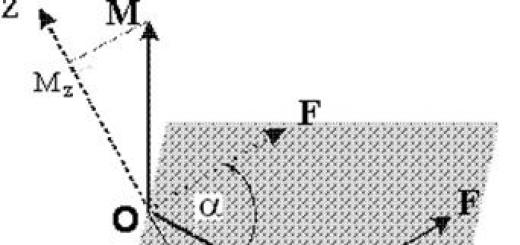
Example 1.16. Write an equation for a plane passing through the Oz axis and forming an angle of 60 degrees with the 2x+y-z-7=0 plane.
Decision. The plane passing through the Oz axis is given by the equation Ax+By=0, where A and B do not vanish at the same time. Let B not
is 0, A/Bx+y=0. According to the formula for the cosine of the angle between two planes
Solving the quadratic equation 3m 2 + 8m - 3 = 0, we find its roots
m 1 = 1/3, m 2 = -3, from which we get two planes 1/3x+y = 0 and -3x+y = 0.
Example 1.17. Write the canonical equations of the straight line:
5x + y + z = 0, 2x + 3y - 2z + 5 = 0.
Decision. The canonical equations of the straight line have the form:
where m, n, p- coordinates of the directing vector of the straight line, x1, y1, z1- coordinates of any point belonging to the line. The straight line is defined as the line of intersection of two planes. To find a point belonging to a straight line, one of the coordinates is fixed (the easiest way is to put, for example, x=0) and the resulting system is solved as a system of linear equations with two unknowns. So, let x=0, then y + z = 0, 3y - 2z+ 5 = 0, whence y=-1, z=1. We found the coordinates of the point M (x 1, y 1, z 1) belonging to this line: M (0,-1,1). The directing vector of a straight line is easy to find, knowing the normal vectors of the original planes n 1 (5,1,1) and n 2(2,3,-2). Then
The canonical equations of the line are: x/(-5) = (y + 1)/12 =
= (z - 1)/13.
One of the sub-items of the topic “The equation of a straight line on a plane” is the issue of compiling parametric equations of a straight line on a plane in a rectangular coordinate system. The article below discusses the principle of compiling such equations for certain known data. Let us show how to pass from parametric equations to equations of a different form; Let's analyze the solution of typical problems.
A particular line can be defined by specifying a point that belongs to that line and a direction vector for the line.
Suppose we are given a rectangular coordinate system O x y . And also the straight line a is given, indicating the point M 1 lying on it (x 1, y 1) and the direction vector of the given straight line a → = (a x , a y) . We give a description of the given line a using equations.
We use an arbitrary point M (x, y) and get a vector M 1 M →; calculate its coordinates from the coordinates of the start and end points: M 1 M → = (x - x 1 , y - y 1) . Let's describe the result: the line is given by a set of points M (x, y), passes through the point M 1 (x 1, y 1) and has a direction vector a → = (a x , a y) . The specified set defines a straight line only when the vectors M 1 M → = (x - x 1 , y - y 1) and a → = (a x , a y) are collinear.
There is a necessary and sufficient condition for the collinearity of vectors, which in this case for the vectors M 1 M → = (x - x 1 , y - y 1) and a → = (a x , a y) can be written as an equation:
M 1 M → = λ · a → , where λ is some real number.
Definition 1
The equation M 1 M → = λ · a → is called the vector-parametric equation of the line.
In coordinate form, it looks like:
M 1 M → = λ a → ⇔ x - x 1 = λ a x y - y 1 = λ a y ⇔ x = x 1 + a x λ y = y 1 + a y λ
The equations of the resulting system x = x 1 + a x · λ y = y 1 + a y · λ are called parametric equations of a straight line on a plane in a rectangular coordinate system. The essence of the name is as follows: the coordinates of all points of the line can be determined by parametric equations on the plane of the form x = x 1 + a x λ y = y 1 + a y λ when iterating over all real values of the parameter λ
According to the above, the parametric equations of a straight line on the plane x \u003d x 1 + a x λ y \u003d y 1 + a y λ determine a straight line that is given in a rectangular coordinate system, passes through the point M 1 (x 1, y 1) and has a guide vector a → = (a x , a y) . Therefore, if the coordinates of a certain point of the straight line and the coordinates of its directing vector are given, then it is possible to immediately write down the parametric equations of the given straight line.
Example 1
It is necessary to compose parametric equations of a straight line on a plane in a rectangular coordinate system, if the point M 1 (2, 3) belonging to it and its direction vector are given a → = (3 , 1) .
Decision
Based on the initial data, we get: x 1 \u003d 2, y 1 \u003d 3, a x \u003d 3, a y \u003d 1. The parametric equations will look like:
x = x 1 + a x λ y = y 1 + a y λ ⇔ x = 2 + 3 λ y = 3 + 1 λ ⇔ x = 2 + 3 λ y = 3 + λ
Let's clearly illustrate:

Answer: x = 2 + 3 λ y = 3 + λ
It should be noted: if the vector a → = (a x , a y) serves as a directing vector of the line a, and the points M 1 (x 1, y 1) and M 2 (x 2, y 2) belong to this line, then it can be determined by setting parametric equations of the form: x = x 1 + a x λ y = y 1 + a y λ , as well as this option: x = x 2 + a x λ y = y 2 + a y λ .
For example, we are given a directing vector of a straight line a → \u003d (2, - 1), as well as points M 1 (1, - 2) and M 2 (3, - 3) belonging to this line. Then the straight line is determined by parametric equations: x = 1 + 2 · λ y = - 2 - λ or x = 3 + 2 · λ y = - 3 - λ .
Attention should also be paid to the following fact: if a → = (a x , a y) is the directing vector of the straight line a , then any of the vectors will also be its directing vector μ a → = (μ a x , μ a y) , where μ ϵ R , μ ≠ 0 .
Thus, a straight line a on a plane in a rectangular coordinate system can be defined by parametric equations: x = x 1 + μ a x λ y = y 1 + μ a y λ for any value of μ that is different from zero.
Suppose the line a is given by the parametric equations x = 3 + 2 λ y = - 2 - 5 λ . Then a → = (2 , - 5) - direction vector of this line. And also any of the vectors μ · a → = (μ · 2 , μ · - 5) = 2 μ , - 5 μ , μ ∈ R , μ ≠ 0 will become the direction vector for the given straight line. For clarity, consider a specific vector - 2 · a → = (- 4 , 10) , it corresponds to the value μ = - 2 . In this case, the given straight line can also be determined by the parametric equations x = 3 - 4 · λ y = - 2 + 10 · λ .
Transition from parametric equations of a straight line on a plane to other equations of a given straight line and vice versa
In solving some problems, the use of parametric equations is not the most optimal option, then it becomes necessary to translate the parametric equations of a straight line into equations of a straight line of a different type. Let's see how to do it.
Parametric equations of the straight line x = x 1 + a x · λ y = y 1 + a y · λ will correspond to the canonical equation of the straight line on the plane x - x 1 a x = y - y 1 a y .
We solve each of the parametric equations with respect to the parameter λ, equate the right parts of the obtained equalities and obtain the canonical equation of the given straight line:
x = x 1 + a x λ y = y 1 + a y λ ⇔ λ = x - x 1 a x λ = y - y 1 a y ⇔ x - x 1 a x = y - y 1 a y
In this case, it should not be embarrassing if a x or a y will be equal to zero.
Example 2
It is necessary to carry out the transition from the parametric equations of the straight line x = 3 y = - 2 - 4 · λ to the canonical equation.
Decision
We write the given parametric equations in the following form: x = 3 + 0 λ y = - 2 - 4 λ
We express the parameter λ in each of the equations: x = 3 + 0 λ y = - 2 - 4 λ ⇔ λ = x - 3 0 λ = y + 2 - 4
We equate the right parts of the system of equations and obtain the required canonical equation of a straight line in the plane:
x - 3 0 = y + 2 - 4
Answer: x - 3 0 = y + 2 - 4
In the case when it is necessary to write down the equation of the straight line of the form A x + B y + C = 0 , while the parametric equations of the straight line on the plane are given, it is necessary first to make the transition to the canonical equation, and then to the general equation of the straight line. Let's write down the whole sequence of actions:
x = x 1 + a x λ y = y 1 + a y λ ⇔ λ = x - x 1 a x λ = y - y 1 a y ⇔ x - x 1 a x = y - y 1 a y ⇔ ⇔ a y (x - x 1) = a x (y - y 1) ⇔ A x + B y + C = 0
Example 3
It is necessary to write down the general equation of a straight line if the parametric equations defining it are given: x = - 1 + 2 λ y = - 3 λ
Decision
First, let's make the transition to the canonical equation:
x = - 1 + 2 λ y = - 3 λ ⇔ λ = x + 1 2 λ = y - 3 ⇔ x + 1 2 = y - 3
The resulting proportion is identical to the equality - 3 · (x + 1) = 2 · y. Let's open the brackets and get the general equation of the straight line: - 3 x + 1 = 2 y ⇔ 3 x + 2 y + 3 = 0 .
Answer: 3x + 2y + 3 = 0
Following the above logic of actions, in order to obtain an equation of a straight line with a slope, an equation of a straight line in segments or a normal equation of a straight line, it is necessary to obtain the general equation of a straight line, and from it to carry out a further transition.
Now consider the reverse action: writing the parametric equations of a straight line for a different given form of the equations of this straight line.
The easiest transition: from the canonical equation to the parametric ones. Let the canonical equation of the form be given: x - x 1 a x = y - y 1 a y . We take each of the relations of this equality equal to the parameter λ:
x - x 1 a x = y - y 1 a y = λ ⇔ λ = x - x 1 a x λ = y - y 1 a y
Let us solve the resulting equations for the variables x and y:
x = x 1 + a x λ y = y 1 + a y λ
Example 4
It is necessary to write down the parametric equations of the straight line if the canonical equation of the straight line on the plane is known: x - 2 5 = y - 2 2
Decision
Let's equate the parts of the known equation to the parameter λ: x - 2 5 = y - 2 2 = λ . From the obtained equality we obtain the parametric equations of the straight line: x - 2 5 = y - 2 2 = λ ⇔ λ = x - 2 5 λ = y - 2 5 ⇔ x = 2 + 5 λ y = 2 + 2 λ
Answer: x = 2 + 5 λ y = 2 + 2 λ
When it is necessary to make a transition to parametric equations from a given general equation of a straight line, an equation of a straight line with a slope or an equation of a straight line in segments, it is necessary to bring the original equation to the canonical one, and then make the transition to parametric equations.
Example 5
It is necessary to write down the parametric equations of the straight line with the known general equation of this straight line: 4 x - 3 y - 3 = 0 .
Decision
We transform the given general equation into an equation of the canonical form:
4 x - 3 y - 3 = 0 ⇔ 4 x = 3 y + 3 ⇔ ⇔ 4 x = 3 y + 1 3 ⇔ x 3 = y + 1 3 4
We equate both parts of the equality to the parameter λ and obtain the required parametric equations of the straight line:
x 3 = y + 1 3 4 = λ ⇔ x 3 = λ y + 1 3 4 = λ ⇔ x = 3 λ y = - 1 3 + 4 λ
Answer: x = 3 λ y = - 1 3 + 4 λ
Examples and problems with parametric equations of a straight line on a plane
Let us consider the most common types of problems using parametric equations of a straight line on a plane in a rectangular coordinate system.
- In problems of the first type, the coordinates of points are given, whether or not they belong to a straight line described by parametric equations.
The solution of such problems is based on the following fact: the numbers (x, y) determined from the parametric equations x \u003d x 1 + a x λ y \u003d y 1 + a y λ for some real value λ are the coordinates of a point belonging to the straight line, which is described these parametric equations.
Example 6
It is necessary to determine the coordinates of a point that lies on a straight line given by the parametric equations x = 2 - 1 6 · λ y = - 1 + 2 · λ for λ = 3 .
Decision
We substitute the known value λ = 3 into the given parametric equations and calculate the desired coordinates: x = 2 - 1 6 3 y = - 1 + 2 3 ⇔ x = 1 1 2 y = 5
Answer: 1 1 2 , 5
The following problem is also possible: let some point M 0 (x 0, y 0) be given on a plane in a rectangular coordinate system and it is necessary to determine whether this point belongs to the line described by the parametric equations x = x 1 + a x λ y = y 1 + a y λ .
To solve such a problem, it is necessary to substitute the coordinates of a given point into the known parametric equations of a straight line. If it is determined that such a value of the parameter λ = λ 0 is possible, in which both parametric equations are true, then the given point belongs to the given straight line.
Example 7
Points M 0 (4, - 2) and N 0 (- 2, 1) are given. It is necessary to determine whether they belong to the straight line defined by the parametric equations x = 2 · λ y = - 1 - 1 2 · λ .
Decision
We substitute the coordinates of the point M 0 (4, - 2) into the given parametric equations:
4 = 2 λ - 2 = - 1 - 1 2 λ ⇔ λ = 2 λ = 2 ⇔ λ = 2
We conclude that the point M 0 belongs to a given line, because corresponds to the value λ = 2 .
2 = 2 λ 1 = - 1 - 1 2 λ ⇔ λ = - 1 λ = - 4
It is obvious that there is no such parameter λ to which the point N 0 will correspond. In other words, the given line does not pass through the point N 0 (- 2 , 1) .
Answer: point M 0 belongs to a given line; the point N 0 does not belong to the given line.
- In problems of the second type, it is required to compose parametric equations of a straight line on a plane in a rectangular coordinate system. The simplest example of such a problem (with known coordinates of the point of the line and direction vector) was considered above. Now let's look at examples in which you first need to find the coordinates of the direction vector, and then write down the parametric equations.
Point M 1 1 2 , 2 3 is given. It is necessary to compose parametric equations of a straight line passing through this point and a parallel straight line x 2 \u003d y - 3 - 1.
Decision
According to the condition of the problem, the straight line, the equation of which we have to get ahead of, is parallel to the straight line x 2 \u003d y - 3 - 1. Then, as a directing vector of a straight line passing through a given point, it is possible to use the directing vector of a straight line x 2 = y - 3 - 1, which we write in the form: a → = (2, - 1) . Now all the necessary data are known in order to compose the desired parametric equations:
x = x 1 + a x λ y = y 1 + a y λ ⇔ x = 1 2 + 2 λ y = 2 3 + (- 1) λ ⇔ x = 1 2 + x λ y = 2 3 - λ
Answer: x = 1 2 + x λ y = 2 3 - λ .
Example 9
Point M 1 (0, - 7) is given. It is necessary to write the parametric equations of a straight line passing through this point perpendicular to the straight line 3 x – 2 y – 5 = 0 .
Decision
As the directing vector of the straight line, the equation of which must be composed, it is possible to take the normal vector of the straight line 3 x - 2 y - 5 = 0 . Its coordinates are (3 , - 2) . We write the required parametric equations of the straight line:
x = x 1 + a x λ y = y 1 + a y λ ⇔ x = 0 + 3 λ y = - 7 + (- 2) λ ⇔ x = 3 λ y = - 7 - 2 λ
Answer: x = 3 λ y = - 7 - 2 λ
- In problems of the third type, it is required to make a transition from parametric equations of a given straight line to other types of equations that determine it. We considered the solution of such examples above, we will give one more.
Given a straight line on a plane in a rectangular coordinate system, defined by the parametric equations x = 1 - 3 4 · λ y = - 1 + λ . It is necessary to find the coordinates of some normal vector of this line.
Decision
To determine the desired coordinates of the normal vector, we will make the transition from parametric equations to the general equation:
x = 1 - 3 4 λ y = - 1 + λ ⇔ λ = x - 1 - 3 4 λ = y + 1 1 ⇔ x - 1 - 3 4 = y + 1 1 ⇔ ⇔ 1 x - 1 = - 3 4 y + 1 ⇔ x + 3 4 y - 1 4 = 0
The coefficients of the variables x and y give us the required coordinates of the normal vector. Thus, the normal vector of the line x = 1 - 3 4 · λ y = - 1 + λ has coordinates 1 , 3 4 .
Answer: 1 , 3 4 .
If you notice a mistake in the text, please highlight it and press Ctrl+Enter
So far, we have considered the equation of a surface in space with coordinate axes X, Y, Z in an explicit form or in an implicit form
![]()
One can write the surface equations in parametric form, expressing the coordinates of its points as functions of two independent variable parameters and
We will assume that these functions are single-valued, continuous, and have continuous derivatives up to the second order in a certain range of parameters
If we substitute these coordinate expressions in terms of u and v into the left side of equation (37), then we should obtain an identity with respect to u and V. Differentiating this identity with respect to the independent variables u and v, we have

Considering these equations as two homogeneous equations with respect to and applying the algebraic lemma mentioned in , we obtain

where k is some coefficient of proportionality.
We assume that the factor k and at least one of the differences on the right-hand sides of the last formulas are nonzero.
Let us denote for brevity the written three differences as follows:

As you know, the equation of the tangent plane to our surface at some point (x, y, z) can be written as
or, replacing with proportional quantities, we can rewrite the equation of the tangent plane as follows:
The coefficients in this equation are known to be proportional to the direction cosines of the normal to the surface.
The position of the variable point M on the surface is characterized by the values of the parameters u and v, and these parameters are usually called the coordinates of the surface points or the coordinate parameters.
By giving the parameters u and v constant values, we obtain two families of lines on the surface, which we will call the coordinate lines of the surface: coordinate lines along which only v changes, and coordinate lines along which only u changes. These two families of coordinate lines give a coordinate grid on the surface.
As an example, consider a sphere centered at the origin and radius R. The parametric equations of such a sphere can be written as
The coordinate lines in this case are, obviously, the parallels and meridians of our sphere.
Abstracting from the coordinate axes, we can characterize the surface by a variable radius-vector going from a constant point O to a variable point M of our surface. The partial derivatives of this radius-vector with respect to the parameters will obviously give vectors directed along tangents to the coordinate lines. The components of these vectors along the axes
it will be, according to and hence, that the coefficients in the equation of the tangent plane (39) are the components of the vector product. This vector product is a vector perpendicular to the tangents, i.e., a vector directed along the normal of the surface. The square of the length of this vector is obviously expressed by the scalar product of the vector and itself, that is, in other words, by the square of this vector 1). In what follows, a significant role will be played by the unit normal vector to the surface, which we can obviously write in the form

By changing the order of the factors in the written vector product, we get the opposite direction for the vector (40). In what follows, we will fix the order of the factors in a certain way, i.e., we will fix the direction of the normal to the surface in a certain way.
Let us take some point M on the surface and draw through this point some curve (L) lying on the surface. This curve, generally speaking, is not a coordinate line, and both H and v will vary along it. The direction of the tangent to this curve will be determined by the vector if we assume that along (L) in the vicinity of the point, the parameter v is a function of which has a derivative. From this it can be seen that the direction of the tangent to a curve drawn on a surface at some point M of this curve is fully characterized by the value at that point. When defining the Tangent Plane and deriving its equation (39), we assumed that functions (38) at the considered point and its neighborhood have continuous partial derivatives and that at least one of the coefficients of equation (39) is different from zero at the considered point.
Vector and parametric equations of the plane. Let r 0 and r be the radius vectors of the points M 0 and M, respectively. Then M 0 M = r - r 0 , and the condition (5.1) that the point M belongs to the plane passing through the point M 0 perpendicularly non-zero vector n (Fig. 5.2, a), can be written using dot product as a ratio
n(r - r 0) = 0, (5.4)
which is called vector equation of the plane.
A fixed plane in space corresponds to a set of vectors parallel to it, i.e. space V2. Let's choose in this space basis e 1 , e 2 , i.e. a pair of non-collinear vectors parallel to the considered plane, and a point M 0 on the plane. If the point M belongs to the plane, then this is equivalent to the fact that the vector M 0 M is parallel to it (Fig. 5.2, b), i.e. it belongs to the indicated space V 2 . This means that there is decomposition of the vector M 0 M in the basis e 1 , e 2 , i.e. there are numbers t 1 and t 2 for which M 0 M = t 1 e 1 + t 2 e 2 . Writing the left side of this equation in terms of the radius vectors r 0 and r of the points M 0 and M, respectively, we obtain vector parametric equation of the plane
r = r 0 + t 1 e 1 + t 2 e 2 , t 1 , t 1 ∈ R. (5.5)
To pass from the equality of vectors in (5.5) to their equality coordinates, denoted by (x 0 ; y 0 ; z 0), (x; y; z) point coordinates M 0 , M and through (e 1x ; e 1y ; e 1z ), (e 2x ; e 2y ; e 2z ) the coordinates of the vectors e 1 , e 2 . Equating the same-named coordinates of the vectors r and r 0 + t 1 e 1 + t 2 e 2 , we obtain parametric plane equations

A plane passing through three points. Let's assume that three points M 1 , M 2 and M 3 do not lie on one straight line. Then there is a unique plane π to which these points belong. Let us find the equation of this plane by formulating the criterion for an arbitrary point M to belong to the given plane π. Then we write this criterion in terms of the coordinates of the points. The indicated criterion is the description of the plane π as the set of those points M for which the vectors M 1 M 2 , M 1 M 3 and M 1 M coplanar. The criterion for the complanarity of three vectors is the equality to zero of their mixed product(see 3.2). The mixed product is calculated using third order determinant, whose strings are the coordinates of the vectors in orthonormal basis. Therefore, if (x i; yx i; Zx i) are the coordinates of the points Mx i, i = 1, 2, 3, and (x; y; z) are the coordinates of the point M, then M 1 M = (x-x 1; y-y 1 ; z-z 1 ), M 1 M 2 = (x 2 -x 1 ; y 2 -y 1 ; z 2 -z 1 ), M 1 M 3 = (x 3 -x 1 ; y 3 -y 1 ; z 3 -z 1 ) and the condition of equality to zero of the mixed product of these vectors has the form
Calculating the determinant, we get linear relative to x, y, z the equation, which is the general equation of the desired plane. For example, if expand the determinant along the 1st row, then we get
This equality, after calculating the determinants and opening the brackets, is converted to the general equation of the plane.
Note that the coefficients of the variables in the last equation coincide with the coordinates vector product M 1 M 2 × M 1 M 3 . This vector product, being the product of two non-collinear vectors parallel to the π plane, gives a non-zero vector perpendicular to π, i.e. her normal vector. So the appearance of the coordinates of the vector product as coefficients of the general equation of the plane is quite natural.
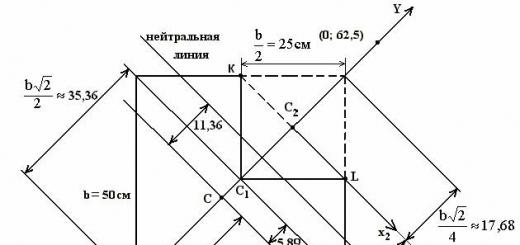
Consider the following particular case of a plane passing through three points. Points M 1 (a; 0; 0), M 2 (0; b; 0), M 3 (0; 0; c), abc ≠ 0, do not lie on one straight line and define a plane that cuts off segments on the coordinate axes non-zero length (Fig. 5.3). Here, the "lengths of segments" mean the value of non-zero coordinates of the radius vectors of the points M i , i = 1,2,3.

Since M 1 M 2 = (-a; b; 0), M 1 M 3 = (-a; 0; c), M 1 M = (x-a; y; z), equation (5.7) takes the form

Having calculated the determinant, we find bc(x - a) + acy + abz = 0, divide the resulting equation by abc and move the free term to the right side,
x/a + y/b + z/c = 1.
This equation is called plane equation in segments.
Example 5.2. Let's find the general equation of a plane that passes through a point with coordinates (1; 1; 2) and cuts off segments of the same length from the coordinate axes.
The equation of a plane in segments, provided that it cuts off segments of equal length from the coordinate axes, say a ≠ 0, has the form x/a + y/b + z/c = 1. This equation must satisfy the coordinates (1; 1; 2) known point on the plane, i.e. the equality 4/a = 1 holds. Therefore, a = 4 and the desired equation is x + y + z - 4 = 0.
Normal equation of the plane. Consider some plane π in space. We fix for her unit normal vector n directed from origin"toward the plane", and denote by p the distance from the origin O of the coordinate system to the plane π (Fig. 5.4). If the plane passes through the origin of the coordinate system, then p = 0, and any of the two possible directions can be chosen as the direction for the normal vector n.
If the point M belongs to the plane π, then this is equivalent to the fact that vector orthogonal projection OM to direction vector n is equal to p, i.e. the condition nOM = pr n OM = p is satisfied, since vector length n is equal to one.
Denote the coordinates of the point M by (x; y; z) and let n = (cosα; cosβ; cosγ) (recall that for the unit vector n its direction cosines cosα, cosβ, cosγ are also its coordinates). Writing the scalar product in the equality nOM = p in coordinate form, we obtain normal equation of the plane
xcosα + ycosbeta; + zcosγ - p = 0.

Similarly to the case of a straight line in a plane, the general equation of a plane in space can be transformed into its normal equation by dividing by a normalizing factor.
For the plane equation Ax + By + Cz + D = 0, the normalizing factor is the number ±√(A 2 + B 2 + C 2), the sign of which is chosen opposite to the sign of D. In absolute value, the normalizing factor is the length of the normal vector (A; B ; C) of the plane, and the sign corresponds to the desired direction of the unit normal vector of the plane. If the plane passes through the origin of the coordinate system, i.e. D = 0, then the sign of the normalizing factor can be chosen by any sign.