де r- радіус-вектор, проведений з точки О в точку А, розташування матеріальної точки, p=m v- Імпульс матеріальної точки. Модуль вектора моменту імпульсу:
де a – кут між векторами rі p, l – плече вектора p щодо точки О. Вектор L,згідно з визначенням векторного твору перпендикулярний до площини, в якій лежать вектори. rі p(або v), його напрямок збігається з напрямком поступального руху правого гвинта при його обертанні від rдо p
Моментом імпульсу щодо осіназивається скалярна величина, що дорівнює проекції на цю вісь вектора моменту імпульсу, визначеного щодо довільної точки на цій осі.
Моментом сили M матеріальної точки щодо точкиназивається векторна величина, що визначається векторним твором радіуса-вектора r, проведеного з точки Про в точку докладання сили, на силу F: .
 |
| Рис.2. |
Модуль вектора моменту сили:
де a – кут між векторами rі F, d = r*sina – плече сили – найкоротша відстань між лінією дії сили та точкою О. Вектор M(так само як L) - перпендикулярний до площини, в якій лежать вектори. rі F, його напрямок збігається з напрямком поступального руху правого гвинта при його обертанні від rдо Fпо найкоротшому відстані, як показано малюнку.
Моментом сили щодо осіназивається скалярна величина, що дорівнює проекції на цю вісь вектора моменту сили Mпевного щодо довільної точки на цій осі.
Основний закон динаміки обертального руху
Для з'ясування призначення наведених вище понять розглянемо систему двох матеріальних точок (часток) і потім узагальним результат на систему з довільного числа частинок (тобто. на тверде тіло). Нехай на частинки з масами m 1 , m 2 імпульси яких p 1і p 2, діють зовнішні сили F 1і F 2. Частинки також взаємодіють між собою внутрішніми силами f 12і f 21 .
 |
| Рис.3. |
Запишемо другий закон Ньютона для кожної з частинок, а також зв'язок між внутрішніми силами, що випливає з третього закону Ньютона:
Помножимо векторне рівняння (1) на r 1, а рівняння (2) – на r 2і складемо отримані вирази:
Перетворимо ліві частини рівняння (4), враховуючи що
 .
.
Вектори і паралельні та їх векторний добуток дорівнює нулю, тому можна записати
 . (5)
. (5)
Перші два доданки праворуч (4) рівні нулю, тобто.
оскільки f 21 =-f 12, а вектор r 1-r 2спрямований по одній і тій же прямій, що вектор f 12.
Враховуючи (5)і (6) з (4) отримаємо
![]() або
або
де L=L 1 +L 2; M=M 1 +M 2. Узагальнюючи результат на систему з n частинок, ми можемо записати L=L 1 +L 2 +…+L n = M=M1+M2+Mn=
Рівняння (7) є математичним записом основного закону динаміки обертального руху: швидкість зміни моменту імпульсу системи дорівнює сумі діючих на неї моментів зовнішніх сил. Цей закон справедливий щодо будь-якої нерухомої або такої, що рухається з постійною швидкістю точки в інерційній системі відліку. Звідси ж випливає закон збереження моменту імпульсу: якщо момент зовнішніх сил M дорівнює нулю, момент імпульсу системи зберігається (L= Const).
Момент імпульсу абсолютно твердого тіла щодо нерухомої осі.
Розглянемо обертання абсолютно твердого тіла довкола нерухомої осі z. Тверде тіло можна як систему з n матеріальних точок (частинок). При обертанні деяка точка тіла, що розглядається (позначимо її індексом i, причому i=1…n) рухається по колу постійного радіусу R i з лінійною швидкістю v i навколо осі z (рис.4). Її швидкість v iта імпульс m i v iперпендикулярні радіусу R i. Тому модуль моменту імпульсу частинки тіла щодо точки, розташованої на осі обертання:
де r i - радіус-вектор, проведений від точки Про до частинки.
Використовуючи зв'язок між лінійною та кутовою швидкістю v i = wR i , де R i – відстань частинки від осі обертання, отримаємо
Проекція цього вектора вісь обертання z, тобто. момент імпульсу частинки тіла щодо осі z дорівнюватиме:
Момент імпульсу твердого тіла щодо осі є сума моментів імпульсів всіх частин тіла:
![]()
Величина I z , що дорівнює сумі творів мас частинок тіла на квадрати їх відстаней до осі z, називається моментом інерції тіла щодо цієї осі:
З виразу (8) випливає, що момент імпульсу тіла не залежить від положення точки О на осі обертання, тому говорять про момент імпульсу тіла щодо деякої осі обертання, а не щодо точки
Між формулюваннями основного закону обертального руху, визначеннями моменту імпульсу, сили існує схожість із формулюваннями другого закону Ньютона та визначенням імпульсу для поступального руху.
Вільні осі та головні осі інерції тіла
Щоб зберегти фіксоване положення у просторі осі обертання твердого тіла, її механічно закріплюють, використовуючи зазвичай підшипники, тобто. впливають зовнішніми силами. Проте існують такі осі обертання тіл, які змінюють своєї орієнтації у просторі без на них зовнішніх сил. Ці осі називаються вільнимиосями. Можна довести, що будь-яке тіло має три взаємно перпендикулярні осі, що проходять через його центр мас, які є вільними. Ці осі називаються також головними осями інерції тіла.
Гіроскопи
В даний час гіроскопами називають дуже широкий клас приладів, в яких використовуються більше ста різних явищ і фізичних принципів. У цій лабораторній роботі вивчається класичний гіроскоп, надалі просто гіроскоп.
Гіроскопом (або дзиґом) називається масивне симетричне тіло, що обертається з великою кутовою швидкістю навколо своєї осі симетрії. Цю вісь ми називатимемо віссю гіроскопа. Вісь гіроскопа є однією з головних осей інерції (вільною віссю). Момент імпульсу гіроскопа в такому випадку спрямований уздовж осі та дорівнює L=I w.
Розглянемо горизонтально орієнтований врівноважений гіроскоп (центр тяжкості якого знаходиться над точкою опори). Оскільки момент сили тяжкості для нього дорівнює нулю, то згідно із законом збереження моменту імпульсу L=I w= const, тобто. напрям його осі обертання не змінює становища у просторі.
При спробі викликати поворот осі гіроскопа спостерігається явище гіроскопічним ефектом. Суть ефекту: під дією сили F, прикладеної до осі гіроскопа, що обертається, вісь гіроскопа повертається в площині, перпендикулярній цій силі . Наприклад, при дії вертикальної сили вісь гіроскопа повертається в горизонтальній площині. На погляд це здається протиприродним.
Гіроскопічний ефект пояснюється так (рис.5). Момент Mсили Fспрямований перпендикулярно до його осі, т.к. M=, r-радіус-вектор з центру мас гіроскопа в точку застосування сили.
 |
| Рис.5. |
За час dt момент імпульсу гіроскопу Lотримає приріст d L=M*dt (відповідно до основного закону обертального руху), і направлене в тому ж напрямку, що і Mі стане рівним L+d L. Напрямок L+d Lзбігається з новим напрямом осі обертання гіроскопа. Таким чином, вісь гіроскопа повернеться в площині перпендикулярної силі Fна деякий кут dφ=|dL|/L=M*dt/L, з кутовою швидкістю
Кутова швидкість повороту осі гіроскопа W називається кутовою швидкістю прецесії, а такий обертальний рух осі гіроскопа прецесією.
З (9) слід
Вектори M, L, Wвзаємно перпендикулярні, тому можна записати
M=.
Ця формула отримана, коли вектори M, L, Wвзаємно перпендикулярні, проте можна довести, що справедлива у випадку.
Зазначимо, що дані міркування та виведення формул справедливе у тому випадку, коли кутова швидкість обертання гіроскопа w>>W.
З формули (9) випливає, що швидкість прецесії W прямо пропорційна M і обернено пропорційна моменту імпульсу гіроскопа L. Якщо час дії сили мало, момент імпульсу L досить великий, то швидкість прецесії W буде мала. Тому короткочасна дія сил практично не призводить до зміни орієнтації осі обертання гіроскопа у просторі. Для її зміни слід прикладати сили протягом тривалого часу.
Практичне застосування гіроскопів
Описані вище властивості гіроскопа знайшли різноманітні практичні застосування. Одне з перших застосування властивостей гіроскопів знайшли в нарізній зброї. Після вильоту зі ствола зброї на снаряд діє сила опору повітря, момент якої може перекинути снаряд і змінити його орієнтацію щодо траєкторії безладним чином, що негативно впливає на дальність польоту та точність попадання в ціль. Гвинтові нарізи в стовбурі зброї повідомляють снаряду, що вилітає, швидке обертання навколо його осі. Снаряд перетворюється на гіроскоп і зовнішній момент сили опору повітря викликає лише прецесію його осі навколо напряму, що стосується траєкторії снаряда. У цьому зберігається певна орієнтація снаряда у просторі.
Іншим важливим застосуванням гіроскопів є різні гіроскопічні прилади: гіророрізонт, гірокомпас тощо. Врівноважені гіроскопи також використовуються для підтримки заданого напрямку руху літака (автопілот). Для цього кріплення гіроскопа здійснюють на карданній підвісці, яка зменшує дію зовнішніх моментів сил, що виникають при маневрі літака. Завдяки цьому вісь гіроскопа зберігає свій напрямок у просторі незалежно від руху літака. При відхиленні напрямку руху літака від напрямку, заданого віссю гіроскопа, виникають автоматичні команди, що повертають заданий напрямок.
Описане поведінка гіроскопа також покладено основою приладу, званого гіроскопічним компасом (гирокомпасом). Цей прилад є гіроскопом, вісь якого може вільно повертатися в горизонтальній площині. Якщо вісь гіроскопа не збігається з напрямком меридіана, то завдяки обертанню Землі виникає сила, що прагне повернути вісь у напрямку перпендикулярному горизонту. Однак, завдяки гіроскопічному ефекту вона повертається в горизонтальному напрямку до тих пір, поки не встановиться напрямок, що збігається з меридіаном, що вказує точно на північ. Гіроскопічний компас вигідно відрізняється від компаса з магнітною стрілкою тим, що в його показання не треба вносити поправки на так зване магнітне відмінювання (пов'язане з розбіжністю географічного та магнітного полюсів Землі), а також не треба вживати заходів для компенсації впливу магнітних наведень від корпусу та обладнання судна.
Опис експериментальної установки
Експериментальне встановлення (рис. 6) складається з наступних основних вузлів:
1. Диск гіроскопа.
2. Важіль із метричною шкалою.
3. Вантаж, переміщенням якого по важелю 2 визначається величина моменту сили.
4. Диск із кутовою шкалою для визначення кута повороту осі гіроскопа у горизонтальній площині при прецесії.
5. Блок вимірювань та управління.

1. Визначити модуль моменту сили тяжіння для кількох положень вантажу z на важелі гіроскопа:
![]() ,
,
де m – маса вантажу, z р – координата вантажу за метричною шкалою важеля, коли гіроскоп врівноважений.
2. Для кожного положення вантажу визначити час повороту осі гіроскопа Δ tна заданий кут Δ φ та обчислити кутову швидкість прецесії:
3. Обчислити величину моменту імпульсу гіроскопа кожного з вимірів:
4. Обчислити середнє значення моменту імпульсу гіроскопа:
Де N – число вимірів.
5. Обчислити момент інерції гіроскопа за формулою I = L/w (w -кутова швидкість обертання гіроскопа, w = 2pn, n – число оборотів двигуна в одиницю часу) та визначити абсолютну та відносну помилки у визначенні моменту інерції гіроскопа.
Контрольні питання
1. Що таке момент імпульсу матеріальної точки щодо точки?
2. Основний закон динаміки обертального руху.
3. Що таке момент сили щодо точки?
4. Момент імпульсу абсолютно твердого тіла.
5. Момент інерції твердого тіла щодо цієї осі.
6. Сформулюйте закон збереження моменту імпульсу.
7. Що таке гіроскоп?
8. Що таке гіроскопічний ефект?
9. Що називається прецесією гіроскопа та за яких умов вона спостерігається?
10. Чому дорівнює кутова швидкість прецесії?
Література
1. Савельєв І.В. Курс загальної фізики. Навч. посібник. У 3-х т. т.1 механіка. Молекулярна фізика М: Наука. гл.ред. фіз.мат. літ., 19873. -432 с.
2. Трофімова Т.І. Курс фізики Навч. посібник для вузів. М: Вища. Шк., 2003. –541 с.
ГІРОСКОП(від грец. gyreuо - кружляю, обертаюся і skopeo - дивлюся, спостерігаю) - симетричне тверде тіло, що швидко обертається, вісь обертання (вісь симетрії) якого може змінювати свій напрямок у просторі. Властивістю Р. володіють небесні тіла, що обертаються, артилерійські снаряди, ротори турбін, що встановлюються на судах, гвинти літаків і т. п. У совр. техніці Г.- осн. елемент всіляких гіроскопіч. пристроїв або приладів, що широко застосовуються для автоматич. управління рухом літаків, суден, торпед, ракет та ряді ін. систем гіроскопич. стабілізації, з метою навігації (покажчики курсу, повороту, горизонту, країн світу та інших.), для виміру кутових чи поступать. швидкостей об'єктів, що рухаються (напр., ракет) і в мн. ін (напр., при проходженні стовбурів штоль, будівництві метрополітенів, при бурінні свердловин).
Щоб вісь Р. могла вільно повертатися в просторі, Р. зазвичай закріплюють у кільцях т.з. карданова підвісу (рис. 1), в якому осі внутр. і зовніш. кілець та вісь Р. перетинаються в одній точці, зв. центром підвісу. Закріплений у такому підвісі Р. має 3 ступені свободи і може здійснювати будь-який поворот біля центру підвісу. Якщо центр тяжкості Р. збігається з центром підвісу, Р. зв. врівноваженим, або астатичним. Вивчення законів руху Г. – завдання динаміки твердого тіла.
Рис. 1. Класичний карданів підвіс, а- зовнішнє кільце, б- внутрішнє кільце, в- Ротор.

Рис. 2. Прецесія гіроскопа. Кутова швидкість прецесії спрямована так, що вектор власного кінетичного моменту Н
прагне суміщення з вектором моменту М
пари, що діє на гіроскоп.
Основні властивості гіроскопу. Якщо до осі вільного, що швидко обертається, Г. докласти пару сил ( P - F) з моментом ( h- плече сили) (рис. 2), то (проти очікування) Р. почне додатково повертатися не навколо осі х, перпендикулярної до площини пари, а навколо осі у, що лежить у цій площині і перпендикулярна до прив. осі тіла z. Це доповнить. рух зв. прецесією. Прецесія Р. відбуватиметься щодо інерціальної системи відліку(до осей, спрямованих на нерухомі зірки) з кутовою швидкістю

Рис 13. Гіроскоп напряму.
У ряді приладів використовується також властивість Р. поступово прецесувати під дією постійно доданих сил. Так, якщо у вигляді доповнить. вантажу викликати прецесію Р. з кутовою швидкістю, чисельно рівною та протилежно спрямованою вертикальною складовою кутової швидкості обертання Землі (де U- кутова швидкість Землі, - широта місця), то ось такого Р. з тим чи іншим ступенем точності зберігатиме незмінний напрямок щодо країн світу. Протягом дек. годин, поки не накопичиться помилка в 1-2°, такий Р., що називається гіроазимутом, або Р. напрямку (рис. 13), може замінити компас (напр., на літаках, зокрема в полярній авіації, де показання магн. компасу ненадійні). Аналогічним Р., але зі значно більшим усуненням центру тяжкості від осі прецесії, можна визначати надійдуть. швидкість об'єкта, що рухається у напрямку осі bb 1, з будь-яким прискоренням (рис. 14). Якщо відволіктися від впливу сили тяжіння, можна вважати, що у Г. діє момент переносної сили інерції Q, де т- Маса Р., l– плече. Тоді, за ф-ле (1), Г. прецесуватиме навколо осі bb 1 з кутовою швидкістю. Після інтегрування останнього рівності отримуємо , де - поч. швидкість об'єкта. T. о., можна визначити швидкість об'єкта vв будь-який момент часу по куту , на який Р. повернеться до цього моменту навколо осі bb 1 . Для цього прилад повинен бути забезпечений лічильником оборотів і пристроєм, що віднімає з повного кута повороту кут, на який Р. повернеться внаслідок дії на нього моменту сили тяжіння. Таким приладом (інтегратором поздовжніх прискорень, що здаються) визначають швидкості вертик. зльоту ракети; при цьому ракета має бути стабілізована так, щоб вона не мала обертання навколо осі симетрії.

Рис. 14. Гіроскопічний вимірник швидкості підйому ракети. - прискорення підйому; g- прискорення вільного падіння; P - сила тяжіння, Q- Сила інерції, - Власний кінетичний момент.
У ряді суч. конструкцій застосовують т.з. поплавковий, або інтегруючий, Р. Ротор такого Р. поміщений у кожух - поплавець, занурений у рідину (рис. 15). При обертанні поплавця навколо його осі хна Р. діятиме момент M xв'язкого тертя, пропорційний кутовий швидкості обертання. Завдяки цьому виявляється, що якщо Р. повідомити змусить. обертання навколо осі у, то кутова швидкість цього обертання відповідно до рівності (1) буде пропорційна . В результаті кут повороту поплавця навколо осі хбуде, своєю чергою, пропорційний інтегралу за часом (тому Р. і зв. інтегруючим). Доповнить. електрич. та електромеханіч. пристрої дозволяють або вимірювати цим Р. кутову швидкість, або зробити елементом стабілізуючого пристрою. У першому випадку спец. електромагнітами створюється момент щодо осі х, Спрямований проти обертання поплавця; величина цього моменту регулюється так, щоб поплавець зупинився. Тоді момент M 1як би замінить момент M xсил в'язкого тертя і, отже, по ф-ле (1), кутова швидкість буде пропорційна величині М 1 , яка визначається за силою струму, що протікає по обмотках електромагніту. У другому випадку, при стабілізації, наприклад, навколо нерухомої осі у, корпус інтегруючого Г. розміщується на платформі, до-рую може обертати навколо осі успец. електродвигун (рис. 16). Для пояснення принципу стабілізації припустимо, що основа, на якій розташовані підшипники платформи, сама повернеться навколо осі уна деякий кут. При непрацюючому двигуні платформа повернеться в цьому випадку разом з основою на той же кут, а поплавець здійснить поворот навколо осі. хна кут, пропорційний куту. Якщо тепер двигун буде обертати платформу у зворотному напрямку, доки поплавок не повернеться у вихідне положення, то одночасно у вихідне положення повернеться і платформа. Можна безперервно керувати двигуном так, щоб кут повороту поплавця зводився до нуля, тоді платформа виявиться стабілізованою. Поєднання двох поплавкових Р. у загальному підвісі з аналогічно керованими електродвигунами призводить до стабілізації фіксованого напрямку, а трьох - до просторів. стабілізації, що використовується, зокрема, у схемах інерційної навігації.

Рис. 15. Поплавковий інтегруючий гіроскоп: а- ротор гіроскопа; б- поплавець, в тілі якого розташований підшипник осі ротора; в- підтримуюча рідина; г- Корпус; д- Сталеві цапфи в кам'яних опорах; е- датчик кута повороту поплавця щодо корпусу; ж- електромагнітний пристрій, що додає момент навколо осі поплавця.

Рис. 16. Стабілізація навколо нерухомої осі у вигляді поплавкового гіроскопа а- гіроскоп-поплавець; б- підсилювач, в- електродвигун; г- платформа, д- підставу.

Рис. 17. Силова гіроскопічна рама: а- Власне рама; б- гіроскоп; в- спарник; г- датчик кута повороту гіроскопа щодо рами; д- підсилювач сигналу датчика; е- стабілізуючий двигун; ж- Датчик моменту.
У розглянутій системі стабілізації Р. грає роль. елемента, що виявляє відхилення об'єкта від заданого положення, а повернення в це положення проводиться електродвигуном, що отримує відповідний сигнал. Подібні системи гіроскопічні. стабілізації зв. індикаторними (стабілізатори непрямої дії). Поруч із у техніці застосовуються системи т. зв. силовий гіроскопіч. стабілізації (стабілізатори прямої дії), в яких брало Г. безпосередньо сприймають на себе зусилля, що заважають здійсненню стабілізації, а двигуни грають допоможуть. роль, розвантажуючи частково чи повністю Р. і обмежуючи цим кути їхньої прецесії. Конструктивно такі системи простіші за індикаторні. Прикладом може бути одновісна двухгироскопич. рама (рис. 17); ротори що у рамі Р. обертаються у різні боки. Допустимо, що на раму подіє сила, що прагне повернути її навколо осі хта повідомити кутову швидкість. Тоді, за правилом Жуковського, на кожух 1 почне діяти пара, що прагне поєднати вісь ротора з віссю х. В результаті Р. почне прецесувати навколо осі y 2 з деякою кутовою швидкістю . Кожух 2
з тієї ж причини прецесуватиме навколо осі y 2 у протилежний бік. Кути поворотів кожухів будуть при цьому однакові, тому що кожухи пов'язані зубчастим зчепленням. Внаслідок цієї прецесії на підшипники кожуха 1
подіє нова пара, що прагне поєднати вісь ротора з віссю y 1 . Така сама пара діятиме на підшипники кожуха 2
. Моменти цих пар спрямовані протилежно (що випливає з правила Жуковського) та стабілізують раму, тобто утримують її від повороту навколо осі х. Однак якщо прецесії Р. не будуть обмежені, то, як видно з ф-ли (3), при повороті кожухів навколо осей y 1 ,
у 2на кут 90 ° стабілізація припиниться. Тому на осі одного з кожухів є датчик, що реєструє кут повороту кожуха щодо рами та управляє двигуном стабілізації. Повертаючий момент, що виникає у двигуна, спрямований протилежно моменту, що прагне повернути раму навколо осі. х;внаслідок цього прецесія Р. припиняється. Розглянута рама стабілізована по відношенню до поворотів навколо осі х. Повернути раму навколо будь-якої осі, перпендикулярної х, можна безперешкодно, але що виникає при цьому гіроскопіч. момент може викликати значить. тиску на підшипники Г. та їх кожухів. Поєднання трьох таких рам із взаємно перпендикулярними осями призводить до просторів. стабілізації (напр., мистецтв. супутника).
У силових гіроскопії. системах, на відміну від вільних Р., через великі моменти інерції стабілізованих мас виникають досить помітні коливання. рухи типу нутацій. Мають бути прийняті спец. заходи для того, щоб ці коливання були загасаючими, інакше в системі виникають автоколивання. У техніці застосовуються та ін гіроскопіч. прилади, принципи дії яких грунтуються на властивостях Г.
Літ.:Булгаков Би. Ст, Прикладна теорія гіроскопів, 3 видавництва, M., 1976; Ніколаї E. Л., Гіроскоп у кардановому підвісі, 2 видавництва, M., 1964; Малєєв П. І., Нові типи гіроскопів, Л., 1971; Магнус До., Гіроскоп. Теорія та застосування, пров. з ньому., M., 1974; Ішлінський А. Ю, Орієнтація, гіроскопи та інерційна навігація, M., 1976; його ж, Механіка відносного руху та сили інерції, M., 1981; Клімов Д. M., Харламов С. А., Динаміка гіроскопа в кардановому підвісі, M., 1978; Журавльов Ст Ф., Клімов Д. M., Хвильовий твердотільний гіроскоп, M., 1985; Новіков Л. 3., Шаталов M. Ю., Механіка динамічно настроюваних гіроскопів, M., 1985.
А. Ю. Ішлінський.
Рис.91
90
Рис.89
Гіроскопи. Вільний гіроскоп.
Вивчення цих питань необхідно у дисципліні «Деталі машин».
Гіроскоп - це масивне аксіально-симетричне тіло, що обертається з великою кутовою швидкістю навколо осі симетрії.
У цьому випадку моменти всіх зовнішніх сил, включаючи силу тяжіння, щодо центру мас гіроскопа дорівнюють нулю. Це можна реалізувати, наприклад, помістивши гіроскоп у карданів підвіс, зображений на рис.89.
і момент імпульсу зберігається:
Гіроскоп поводиться так само, як і вільніше тіло обертання. Залежно від початкових умов можливі два варіанти поведінки гіроскопа:
1. Якщо гіроскоп розкручений навколо осі симетрії, то напрямки моменту імпульсу та кутової швидкості збігаються:
і напрямок осі симетрії гіроскопа залишається незмінним. У цьому можна переконатися, повертаючи підставку, де розташований карданів підвіс - при довільних поворотах підставки вісь гіроскопа зберігає постійний напрямок у просторі. З цієї ж причини дзига, "запущений" на аркуші картону і підкинутий вгору (рис.90), зберігає напрямок своєї осі під час польоту, і, падаючи вістрям на картон, продовжує стійко обертатися, доки не витрачено запас його кінетичної енергії.
Вільний гіроскоп, розкручений навколо осі симетрії, має досить значну стійкість. З основного рівняння моментів випливає, що зміна моменту імпульсу
Якщо інтервал часу малий, те й мало, тобто при короткочасних впливах навіть дуже великих сил рух гіроскопа незначно змінюється. Гіроскоп ніби пручається спробам змінити його момент імпульсу і здається "затверділим".
Візьмемо гіроскоп конусоподібної форми, що спирається на стрижень підставки у своєму центрі мас О (рис. 91). Якщо тіло гіроскопа не обертається, воно перебуває у стані байдужої рівноваги, і найменший поштовх зрушує його з місця. Якщо ж це тіло привести в швидке обертання навколо своєї осі, то навіть сильні удари дерев'яним молотком не зможуть значно змінити напрямок осі гіроскопа в просторі. Стійкість вільного гіроскопа використовується в різних технічних пристроях, наприклад автопілоті.
2. Якщо вільний гіроскоп розкручений так, що вектор миттєвої кутової швидкості та вісь симетрії гіроскопа не збігаються (як правило, це розбіжність при швидкому обертанні буває незначним), то спостерігається рух, описаний як "вільна регулярна прецесія". Щодо гіроскопу його називають нутацією. При цьому вісь симетрії гіроскопа, вектори і лежать в одній площині, яка обертається навколо напрямку з кутовою швидкістю, що дорівнює - момент інерції гіроскопа щодо головної центральної осі, перпендикулярної осі симетрії. Ця кутова швидкість (назвемо її швидкістю нутації) при швидкому власному обертанні гіроскопа виявляється досить великою, і нутація сприймається оком як дрібне тремтіння осі симетрії гіроскопа.
Нутаційний рух легко продемонструвати за допомогою гіроскопа, показаного на рис. 91 - воно виникає при ударах молотком по стрижню гіроскопа, що обертається навколо своєї осі. При цьому чим сильніше розкручений гіроскоп, тим більше його момент імпульсу - тим більша швидкість нутації і тим "дрібніше" тремтіння осі фігури. Цей досвід демонструє ще одну характерну особливість нутації – з часом вона поступово зменшується та зникає. Це наслідок неминучого тертя в опорі гіроскопа.
Наша Земля - свого роду гіроскоп, і їй також властивий нутаційний рух. Це пов'язано з тим, що Земля дещо приплюснута з полюсів, внаслідок чого моменти інерції щодо осі симетрії та щодо осі, що лежить в екваторіальній площині різняться. У цьому а . У системі відліку, пов'язаної із Землею, вісь обертання рухається поверхнею конуса навколо осі симетрії Землі з кутовою швидкістю , тобто вона здійснює один оборот приблизно за 300 днів. Насправді через, як передбачається, неабсолютну жорсткість Землі, цей час виявляється більше - воно становить близько 440 діб. У цьому відстань точки земної поверхні, якою проходить вісь обертанні, від точки, якою проходить вісь симетрії (Північний полюс), дорівнює всього кількох метрів. Нутаційний рух Землі не згасає - мабуть, його підтримують сезонні зміни, що відбуваються на поверхні
Розглянемо тепер ситуацію, коли до осі гіроскопа прикладено силу, лінія дії якої не проходить через точку закріплення. Досліди показують, що в цьому випадку гіроскоп поводиться дуже незвичайним чином.
Якщо до осі шарнірно закріпленого в точці О гіроскопа (рис. 92) прикріпити пружину і тягнути за неї вгору з силою, то вісь гіроскопа переміщатиметься не в напрямку сили, а перпендикулярно до неї, вбік. Цей рух називається прецесією гіроскопа під впливом зовнішньої сили.
Мета роботи: вивчення особливостей руху гіроскопа під дією моменту зовнішніх сил, вимірювання кутової швидкості прецесії та моменту імпульсу гіроскопа
Гіроскопом називається симетричне тверде тіло, що швидко обертається навколо осі симетрії, яка може змінювати свій напрямок у просторі.
Для демонстраційних цілей зазвичай користуються гіроскопами конструкції, схематично зображена на рис. 6.1. Колесо гіроскопа До(Ротор) насаджено на вісь, яка може повертатися як навколо горизонтальної осі, так і навколо вертикальної осі, тобто. може приймати будь-яке становище у просторі. (Відхилення осі по вертикалі у цій конструкції обмежені невеликими кутами). Для того, щоб момент сил тяжіння щодо трьох осей гіроскопа дорівнював нулю, центр тяжіння гіроскопа повинен збігатися з точкою перетину трьох осей обертання. Ротор гіроскопа приводиться в швидке обертання електромотором.
Рис. 6.1. Схема досвіду
Оскільки момент сили тяжіння щодо точки Про дорівнює нулю, то вісь гіроскопа, що обертається, без будь-яких інших зовнішніх сил залишається нерухомою. Гіроскоп має постійний момент імпульсу, спрямованим уздовж нерухомої осі обертання гіроскопа. Якщо гіроскоп починають діяти зовнішні сили, то вісь гіроскопа починає рухатися – з'являється обертання навколо інших осей. Тоді вже не збігається із віссю гіроскопа, але завжди залишається близьким до неї. Тому, знаючи, як змінюється вектор, ми зможемо сказати, як рухається вісь гіроскопа.
Обертання твердого тіла визначається рівнянням
Тут - момент зовнішніх сил, = I, де I– момент інерції гіроскопа, а – його кутова швидкість. З рівняння (6.1) видно, що векторизменяется лише тоді, коли діє момент. Отже, вісь гіроскопа може помітно переміщатися тільки доти, доки діє момент, що змінює напрямок. Зміни жеза короткі проміжки часу відповідно до рівняння (6.1) визначаються співвідношенням
При короткочасній дії зовнішніх сил (різкий удар) мало, тому і мало - майже не змінюється. Отже, дуже мало має змінюватись і напрямок осі гіроскопа. Справді, при різкому ударі вісь гіроскопа не йде далеко, а тремтить, залишаючись майже дома. після удару перестає змінюватись. Але вісь гіроскопа не повинна співпадати з напрямком, а має бути лише близькою до нього. Вона може здійснювати малі рухи біля напрямку. Такі рухи осі гіроскопа біля напрямку називають нутацій . Тремтіння осі гіроскопа після удару і є одним з видів нутацій.
Якщо гіроскоп обертається навколо осі з дуже великою швидкістю, то й за наявності нешвидких обертань навколо інших осей вектор моменту імпульсу практично збігається з віссю гіроскопа. Надалі ми вважатимемо, що напрямок збігається з віссю гіроскопа.
При тривалому впливі зовнішніх сил вектор змінюватиме свій напрямок у просторі. Разом з ним змінюватиме свій напрямок і вісь гіроскопа. Напрямок? збігається з напрямком, тобто. не з напрямком сили, а з напрямком моменту сили щодо осі О. Якщо збоку натиснути на гіроскоп з деякою силою (рис. 6.1), то вісь його рухатиметься не в напрямку сили, а в напрямку моменту сили.
Якщо на гіроскоп діє сила, що створює постійний момент , то напрямок змінюватиметься за однакові проміжки часу на однакову величину? = ?t. Якщо при цьому весь час лежить у площині руху осі гіроскопа, то? лежить у тій же площині; вектор залишатиметься в цій же площині і обертатиметься з постійною швидкістю. Разом із ним обертатиметься і вісь гіроскопа. Такий рух осі зветься прецесією.
Прецесію гіроскопа можна продемонструвати, повісивши на вісь гіроскопа невеликий вантаж масою m(Рис. 6.1) на відстані r. Сила тяжкості створюватиме момент, що весь час лежить у горизонтальній площині. У присутності вантажу вісь гіроскопа обертається у горизонтальній площині із постійною швидкістю.
Обчислимо кутову швидкість обертання осі гіроскопа.
За час? tвісь гіроскопа повертається на кут
Враховуючи співвідношення (6.2), для кутової швидкості обертання осі (швидкості прецесії) отримаємо
Оскільки, а, співвідношення (6.3) перепишемо як
З отриманого виразу випливає, що менше момент зовнішніх сил, що діють на гіроскоп, і чим більше момент імпульсу гіроскопа, тим менше швидкість його прецесії.
Якщо підштовхувати прецесуючий гіроскоп у напрямку прецесії, то кінець осі, на якому висить вантаж, буде підніматися. Навпаки, якщо тиснути на гіроскоп проти напряму прецесії, то кінець осі з вантажем опускатиметься. Зовнішні сили, що перешкоджають прецесії, призводять до того, що вантаж опускається. При прецесії на вертикальну вісь діють сили тертя в підшипнику, що перешкоджають прецесії, тому вісь прецесуючий гіроскоп не залишається в горизонтальній площині - кінець осі, на якому висить вантаж, поступово опускається.
Прецесія гіроскопа відбувається з постійною швидкістю, доки діє зовнішній момент, і припиняється відразу ж, як тільки зникає зовнішній момент. Рух осі гіроскопа не має інерції. Це з тим, що швидкість обертання осі визначається діючими силами. Інерція є проявом того, що прискорення визначаються силами.
У всіх описаних дослідах як зовнішні сили діють на гіроскоп, а й гіроскоп діє ті тіла, які є джерелом цих сил. Коли ми натискаємо рукою на вісь гіроскопа, то гіроскоп із такою самою силою тисне на руку. Якщо гіроскоп жорстко пов'язаний з деяким тілом, то при кожному русі цього тіла, що супроводжується зміною напряму осі гіроскопа, виникають сили, що діють тіло з боку гіроскопа. Ці сили часто відіграють помітну роль.
Наприклад, частини машин корабля, що обертаються, є гіроскопом, що володіє великим моментом імпульсу. При кільовій хитавиці корабля (коли ніс корабля піднімається і опускається) змінюється напрям моменту імпульсу машини. Внаслідок цього виникають сили тиску з боку валу на підшипники. Ці сили лежать у горизонтальній площині та повертають корабель навколо вертикальної осі. Це «орієнтування за курсом» помітно у малих суден із потужними машинами (буксири).
Сили, що виникають при зміні напрямку осі обертання гіроскопа, можуть бути використані для надання стійкості судну (зменшення хитавиці). Для цього застосовуються величезні гіроскопи з великою швидкістю.
Всі описані властивості гіроскопа пояснюються тим, що осі гіроскопа підпорядковується рівнянню (6.1). Рух осі гіроскопа визначається напрямом сили, а напрямом моменту зовнішніх сил. Але це момент визначається силами, діючими ззовні весь прилад загалом, лише тоді, коли гіроскоп цілком вільний, тобто. коли конструкція приладу припускає будь-яке положення осі гіроскопа. Якщо ж гіроскоп не цілком вільний, то треба брати до уваги і моменти тих сил, які можуть діяти на вісь гіроскопа з боку підшипників, у яких він закріплений.
Ці моменти сил можуть цілком змінити поведінку гіроскопа під впливом зовнішніх сил. Наприклад, якщо закріпити вертикальну вісь і уможливити обертання осі гіроскопа тільки в горизонтальній площині, то він стає абсолютно «слухняним». Під дією сили, прикладеної до гіроскопу горизонтальній площині, вісь гіроскопа починає обертатися у бік дії сили. Ця зміна у поведінці гіроскопа пояснюється тим, що поряд з моментом силіна вісь діє момент сил і з боку підставки, в якій він закріплений. Виникнення цієї миті легко пояснити. Спочатку, поки на гіроскоп не діє сила, на нього не діють моменти та з боку підставки. Гіроскоп "не знає", що він закріплений. Тому спочатку він поводиться як цілком вільний гіроскоп: під дією сили, що створює момент, спрямований вертикально вгору, кінець осі гіроскопа починає підніматися.
Вертикальна вісь, з якою жорстко пов'язана вісь гіроскопа, трохи згинається і виникає момент пружних сил, що діють на вісь гіроскопа. Під дією цього моменту вісь гіроскопа переміщатиметься в горизонтальній площині якраз у тому напрямку, в якому діє сила. Тому невільний гіроскоп є «слухняним»: його вісь повертається туди, куди її прагне повернути зовнішня сила . У вільного гіроскопа вісь повертається в площині, перпендикулярній силі.
Якщо до гіроскопа, що обертається, прикласти пару сил, що прагнуть повернути його біля осі, перпендикулярної до осі обертання, то гіроскоп дійсно буде повертатися, але тільки навколо третьої осі, перпендикулярної до перших двох.
Більш детальний аналіз явищ, аналогічних описаним вище, показує, що гіроскоп прагне розташувати вісь свого обертання таким чином, щоб вона утворила можливо менший кут з віссю вимушеного обертання і щоб обидва обертання відбувалися в тому самому напрямку.
Ця властивість гіроскопа використовується в гіроскопічному компасі, що набув широкого поширення, особливо у військовому флоті. Гирокомпас являє собою дзига, що швидко обертається (мотор трифазного струму, що робить 25 000 об./хв), який на особливому поплавці плаває в посудині з ртуттю і вісь якого встановлюється в площині меридіана. У разі джерелом зовнішнього крутного моменту є добове обертання Землі навколо її осі. Під його дією вісь обертання гіроскопа прагне збігтися у напрямку з віссю обертання Землі, бо обертання Землі діє гіроскоп безперервно, то вісь гіроскопа приймає це становище, тобто. встановлюється вздовж меридіана і продовжує в ньому залишатися так само, як звичайна магнітна стрілка. Гіроскопічні компаси мають у порівнянні з магнітним рядом переваг. На їх показання не впливають маси заліза, що знаходяться поблизу, вони не чутливі до магнітних бур і т.д.
Гіроскопи часто застосовують як стабілізатори. Їх встановлюють зменшення качки на океанських пароплавах. Були також сконструйовані стабілізатори для однорейкових залізниць; масивний гіроскоп, що швидко обертається, поміщається всередині вагона однорейкової дороги, перешкоджає перекиданню вагона. Ротори для гіроскопічних стабілізаторів виготовляють від 1 до 100 і більше тонн.
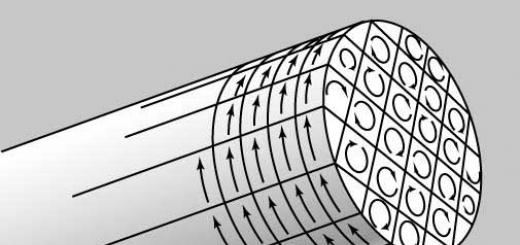
1. Вільні осі обертання. Розглянемо два випадки обертання твердого стрижня щодо осі, що проходить через центр мас.
Якщо розкрутити стрижень щодо осі OOі надати його самому собі, тобто звільнити вісь обертання з підшипників, то у разі рис.71-а орієнтація осі вільного обертання щодо стрижня буде змінюватися, оскільки стрижень під дією пари відцентрових сил інерції розгортатиметься в горизонтальну площину. У разі рис.71-б момент пари відцентрових сил дорівнює нулю, тому розкручений стрижень продовжуватиме обертатися навколо осі. ГОта після її звільнення.
Вісь обертання, положення якої в просторі зберігається без дії будь-яких сил ззовні, називається вільною віссю тіла, що обертається.Отже, вісь перпендикулярна стрижню і проходить через його центр мас є вільна вісь обертання стрижня.
Будь-яке тверде тіло має три взаємно перпендикулярні вільні осі обертання, що перетинаються в центрі мас. Положення вільних осей для однорідних тіл збігається зі становищем їх геометричних осей симетрії (рис.72).
 |
У паралелепіпеда всі три осі фіксовані. У циліндра фіксована лише одна вісь, що збігається з геометричною віссю. У кулі усі три осі не фіксовані.
Вільні осі обертання називаються також головними осями інерції. При вільному обертанні тіл навколо головних осей інерції стійкі лише обертання навколо осей, яким відповідають максимальне і мінімальне значення моменту інерції. Якщо ж тіло діють зовнішні сили, то стійким виявляється обертання лише навколо тієї головної осі, якій відповідає максимальний момент інерції.
2. Гіроскоп(від грецької gyreuo– обертаюся та skopeo– бачу) – однорідне тіло обертання, що швидко обертається навколо осі симетрії, вісь якого може змінювати положення в просторі.
При вивченні руху гіроскопа вважаємо, що:
а. Центр мас гіроскопа збігається з його нерухомою точкою O. Такий гіроскоп називається врівноваженим.
 б. Кутова швидкість wобертання гіроскопа навколо осі набагато більше кутової швидкості Wпереміщення осі в просторі, тобто w >> W.
б. Кутова швидкість wобертання гіроскопа навколо осі набагато більше кутової швидкості Wпереміщення осі в просторі, тобто w >> W.
В. Вектор моменту імпульсу гіроскопу L збігається з вектором кутової швидкості w оскільки гіроскоп обертається навколо головної осі інерції.
Нехай на вісь гіроскопа діє сила F протягом часу D t. За другим законом динаміки для обертального руху, так що зміна моменту імпульсу гіроскопа за цей час, (26.1)
де r - Радіус-вектор, проведений з нерухомої точки Oу точку дії сили (рис.73).
Зміну моменту імпульсу гіроскопа можна розглядати як поворот осі гіроскопа на кут з кутовою швидкістю ![]() . (26.2)
. (26.2)
Тут – нормальна до осі гіроскопа складова сили, що діє на нього.
Під дією сили F , прикладеної до осі гіроскопа, вісь повертається над напрямі дії сили, а напрямку моменту сили M щодо нерухомої точки O. У будь-який момент часу швидкість повороту осі гіроскопа пропорційна за величиною моменту сили, а при постійному плечі сили пропорційна самій силі. Таким чином, рух осі гіроскопа безінерційно. Це єдиний випадок безінерційного руху на механіці.
Рух осі гіроскопа під дією зовнішньої сили називають вимушеною прецесієюгіроскопа (від латинського praecessio – рух попереду).
 3. Ударна дія на вісь гіроскопа. Визначимо кутове зміщення осі гіроскопа внаслідок короткочасного впливу сили на вісь, тобто удару. Нехай протягом малого часу dtна вісь гіроскопа на відстані rвід центру Продіє сила F
. Під впливом імпульсу цієї сили F
dtвісь повертається (рис.74) у напрямі створюваного нею імпульсу моменту сили M
dtна деякий кут
3. Ударна дія на вісь гіроскопа. Визначимо кутове зміщення осі гіроскопа внаслідок короткочасного впливу сили на вісь, тобто удару. Нехай протягом малого часу dtна вісь гіроскопа на відстані rвід центру Продіє сила F
. Під впливом імпульсу цієї сили F
dtвісь повертається (рис.74) у напрямі створюваного нею імпульсу моменту сили M
dtна деякий кут
dq = W dt=(rF/Iw)dt. (26.3)
Якщо точка застосування сили не змінюється, то r= const та при інтегруванні отримуємо. q =.(26.4)
Інтеграл у кожному разі залежить від виду функції ( t). У звичайних умовах кутова швидкість обертання гіроскопа дуже велика, тому чисельник найчастіше набагато менше знаменника, і тому кут q- Мінімальна величина. Гіроскоп, що швидко обертається, володіє стійкістю по відношенню до удару - тим більшою, чим більше його момент імпульсу.
4. Цікаво, що сила, під дією якої вісь гіроскопа прецесує, не робить роботи. Це відбувається тому, що точка гіроскопа, до якої прикладена сила, у будь-який момент зміщується у напрямку, перпендикулярному до напряму дії сили. Тому скалярний добуток сили на вектор малого переміщення завжди дорівнює нулю.
Сили у такому прояві називаються гіроскопічними. Так, завжди гіроскопічною є сила Лоренца, що діє електрично заряджену частинку з боку магнітного поля, в якому вона рухається.
 5. Умова рівноваги ТТ.Щоб ТТ знаходилося в рівновазі, необхідно, щоб сума зовнішніх сил і сума моментів зовнішніх сил дорівнювали нулю:
5. Умова рівноваги ТТ.Щоб ТТ знаходилося в рівновазі, необхідно, щоб сума зовнішніх сил і сума моментів зовнішніх сил дорівнювали нулю:
![]() . (26.5)
. (26.5)
Розрізняють 4 види рівноваги: стійке, нестійке, сідлоподібне та байдуже.
а.Положення рівноваги ТТ є стійким, якщо при невеликих відхиленнях від рівноваги на тіло починають діяти сили, які прагнуть повернути їх у положення рівноваги.
На малюнку 75 показані ситуації стійкої рівноваги тіл у полі сили тяжіння. Сили тяжкості – масові сили, тому рівнодіюча сил тяжіння, що діють на точкові елементи ТТ, прикладена до центру мас. У таких ситуаціях центр мас називають центром тяжкості.
Стійкому положенню рівноваги відповідає мінімум потенційної енергії тіла.
 б. Якщо при невеликих відхиленнях від положення рівноваги на тіло починають діяти сили в напрямку рівноваги, то положення рівноваги є нестійким. Нестійкого стану рівноваги відповідає відносний максимум потенційної енергії тіла (рис.76).
б. Якщо при невеликих відхиленнях від положення рівноваги на тіло починають діяти сили в напрямку рівноваги, то положення рівноваги є нестійким. Нестійкого стану рівноваги відповідає відносний максимум потенційної енергії тіла (рис.76).
в. Сідлоподібною є така рівновага, коли при русі по одному ступені свободи рівновага тіла стійка, а при русі по іншому ступені свободи – нестійка. У ситуації, показаній на малюнку 77, положення тіла по відношенню до координати xє стійким, а стосовно координати y- Нестійким.
р.Якщо при відхиленні тіла від положення рівноваги не виникає жодних сил, які прагнуть змістити тіло в тому чи іншому напрямку, то положення рівноваги називається байдужим. Наприклад, шар у полі сили тяжіння на еквіпотенційній поверхні, тверде тіло, підвішене в точці центру мас (у точці центру тяжіння) (рис.78).
 |
У тих випадках, коли тіло спирається на опору, то чим більша площа опори і чим нижчий центр тяжіння, тим стійкіша рівновага тіла (рис.79).