1. Inertial reference systems. Newton's laws. Mass, momentum, force. The equation of motion of a material point.
2. The concept of a closed system. Law of conservation of momentum. The center of mass of a mechanical system, the law of motion of the center of mass.
3. Movement of bodies of variable mass. Meshchersky equation. Tsiolkovsky formula.
Goals:
· introduce the concepts of inertial and non-inertial frames of reference, mass, momentum, force, closed system;
study Newton's laws;
· derive and formulate the law of conservation of momentum;
describe the motion of bodies of variable mass;
· derive the Meshchersky equation and the Tsiolkovsky formula.
Literature:
1. Trofimova T.I. Physics course: textbook for engineering and technical specialties of universities - M .: Academia, 2006, 2007 and 2008.
2. Grabovsky R. I. Course of physics [Electronic resource]: textbook / R. I. Grabovsky - St. Petersburg [and others]: Lan, 2012.
3. Zisman G. A. General physics course [Electronic resource]: [textbook for students of higher educational institutions studying in technical, natural science and pedagogical areas and specialties]: In 3 volumes / G. A. Zisman, O M. Todes - St. Petersburg [and others]: Lan, 2007 - Vol. 2: Electricity and Magnetism.
4. Liventsev N.M. Physics course [Electronic resource]: textbook - St. Petersburg: Lan, 2012.
5. Babaev V.S., Legusha F.F. Corrective course of physics [Electronic resource] - St. Petersburg: Lan, 2011.
6. Kalashnikov N. P. Fundamentals of physics: a textbook for universities: in 2 volumes / N. P. Kalashnikov, M. A. Smondyrev - M .: Bustard, 2007.
7. Rogachev N. M. Physics course [Electronic resource]: [textbook for university students studying in the field of engineering and technology] / N. M. Rogachev - St. Petersburg [and others]: Lan, 2010.
8. Aleksandrov I.V. and others. Modern physics [Electronic resource]: a textbook for students of all forms of education studying in technical and technological areas and specialties - Ufa: USATU, 2008.
Dynamics of a material point and translational motion of a rigid body
Newton's first law. Weight. Force
Dynamics is the main branch of mechanics, it is based on Newton's three laws, formulated by him in 1687. Newton's laws play an exceptional role in mechanics and are (like all physical laws) a generalization of the results of vast human experience. They are considered as system of interconnected laws and not every single law is subjected to experimental verification, but the whole system as a whole.
Newton's first law: any material point (body) retains a state of rest or uniform rectilinear motion until the impact from other bodies makes it change this state. The desire of a body to maintain a state of rest or uniform rectilinear motion is called inertia. Therefore, Newton's first law is also called law of inertia.
Mechanical motion is relative, and its nature depends on the frame of reference. Newton's first law is not valid in any frame of reference, and those systems in relation to which it is performed are called inertial reference systems. An inertial frame of reference is such a frame of reference, relative to which a material point, free from external influences, either at rest or moving uniformly and in a straight line. Newton's first law states the existence of inertial frames of reference.
It has been experimentally established that the heliocentric (stellar) frame of reference can be considered inertial (the origin of coordinates is in the center of the Sun, and the axes are drawn in the direction of certain stars). The reference frame associated with the Earth, strictly speaking, is non-inertial, but the effects due to its non-inertiality (the Earth rotates around its own axis and around the Sun) are negligible in solving many problems, and in these cases it can be considered inertial.
From experience it is known that under the same influences, different bodies change the speed of their movement unequally, i.e., in other words, acquire different accelerations. Acceleration depends not only on the magnitude of the impact, but also on the properties of the body itself (on its mass).
Weight bodies - a physical quantity, which is one of the main characteristics of matter, which determines its inertial ( inertial mass) and gravitational ( gravitational mass) properties. At present, it can be considered proven that the inertial and gravitational masses are equal to each other (with an accuracy not less than 10–12 of their values).
To describe the effects mentioned in Newton's first law, the concept of force is introduced. Under the action of forces, bodies either change their speed of movement, i.e., acquire accelerations (dynamic manifestation of forces), or deform, i.e., change their shape and dimensions (static manifestation of forces). At each moment of time, the force is characterized by a numerical value, a direction in space, and a point of application. So, force- this is a vector quantity, which is a measure of the mechanical impact on the body from other bodies or fields, as a result of which the body acquires acceleration or changes its shape and size.
Newton's second law
Newton's second law - the basic law of the dynamics of translational motion - answers the question of how the mechanical motion of a material point (body) changes under the action of forces applied to it.
If we consider the action of different forces on the same body, it turns out that the acceleration acquired by the body is always directly proportional to the resultant of the applied forces:
a~f(t=const). (6.1)
Under the action of the same force on bodies with different masses, their accelerations turn out to be different, namely
a ~ 1 /t (F= const). (6.2)
Using expressions (6.1) and (6.2) and taking into account that force and acceleration are vector quantities, we can write
a = kF/m. (6.3)
Relation (6.3) expresses Newton's second law: the acceleration acquired by a material point (body), proportional to the force causing it, coincides with it in direction and is inversely proportional to the mass of the material point (body).
In SI, the proportionality factor k= 1. Then
![]() (6.4)
(6.4)
Considering that the mass of a material point (body) in classical mechanics is a constant value, in expression (6.4) it can be brought under the sign of the derivative:
Vector quantity
numerically equal to the product of the mass of a material point and its speed and having the direction of speed, is called momentum (momentum) this material point.
Substituting (6.6) into (6.5), we obtain
This expression - more general formulation of Newton's second law: the rate of change of momentum of a material point is equal to the force acting on it. Expression (6.7) is called the equation of motion of a material point.
Unit of force in SI - newton(N): 1 N is a force that imparts an acceleration of 1 m / s 2 to a mass of 1 kg in the direction of the force:
1 N \u003d 1 kg × m / s 2.
Newton's second law is valid only in inertial frames of reference. Newton's first law can be derived from the second. Indeed, if the resultant force is equal to zero (in the absence of influence on the body from other bodies), the acceleration (see (6.3)) is also equal to zero. However Newton's first law regarded as independent law(and not as a consequence of the second law), since it is he who asserts the existence of inertial frames of reference, in which only equation (6.7) is satisfied.

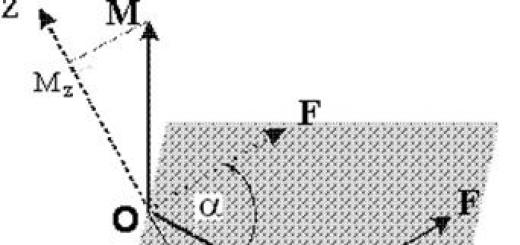
In mechanics, it is of great importance principle of independence of action of forces: if several forces act simultaneously on a material point, then each of these forces imparts an acceleration to the material point according to Newton's second law, as if there were no other forces. According to this principle, forces and accelerations can be decomposed into components, the use of which leads to a significant simplification of problem solving. For example, in fig. 10 acting force F= m a is decomposed into two components: tangential force F t , (directed tangentially to the trajectory) and normal force F n(directed along the normal to the center of curvature). Using expressions and , as well as , you can write:

If several forces act simultaneously on a material point, then, according to the principle of independence of the action of forces, F in Newton's second law is understood as the resulting force.
Newton's third law
The interaction between material points (bodies) is determined by Newton's third law: any action of material points (bodies) on each other has the character of interaction; the forces with which material points act on each other are always equal in absolute value, oppositely directed and act along the straight line connecting these points:
F 12 = - F 21, (7.1)
where F 12 is the force acting on the first material point from the second;
F 21 - force acting on the second material point from the first. These forces are applied to different material points (bodies), always act in pairs and are the forces one nature.
Newton's third law allows the transition from dynamics separate material point to dynamics systems material points. This follows from the fact that for a system of material points, the interaction is reduced to the forces of pair interaction between material points.
Friction forces
In discussing forces up to now, we have not been interested in their origin. However, in mechanics, we will consider various forces: friction, elasticity, gravity.
It is known from experience that any body moving along the horizontal surface of another body, in the absence of other forces acting on it, slows down its movement over time and eventually stops. This can be explained by the existence friction forces, which prevents the sliding of contacting bodies relative to each other. Friction forces depend on the relative velocities of the bodies. Friction forces can be of different nature, but as a result of their action, mechanical energy is always converted into internal energy of the bodies in contact.
There are external (dry) and internal (liquid or viscous) friction. external friction called the friction that occurs in the plane of contact between two bodies in contact with their relative movement. If the contacting bodies are motionless relative to each other, they speak of static friction, but if there is a relative movement of these bodies, then, depending on the nature of their relative motion, they speak of sliding friction, rolling or spinning.
internal friction called friction between parts of the same body, for example, between different layers of a liquid or gas, the speed of which varies from layer to layer. Unlike external friction, there is no static friction here. If the bodies slide relative to each other and are separated by a layer of viscous fluid (lubrication), then friction occurs in the lubricant layer. In this case, one speaks of hydrodynamic friction(the lubricant layer is thick enough) and boundary friction (the thickness of the lubricant layer is 0.1 µm or less).
Let us discuss some regularities of external friction. This friction is due to the roughness of the contacting surfaces; in the case of very smooth surfaces, friction is due to the forces of intermolecular attraction.
Consider a body lying on a plane (Fig. 11), to which a horizontal force F is applied. The body will move only when the applied force F is greater than the friction force F tr. French physicists G. Amonton (1663-1705) and C. Coulomb (1736-1806) empirically established the following law: sliding friction force F tr is proportional to strength N normal pressure with which one body acts on another:
F tr = f N ,
where f- coefficient of sliding friction, depending on the properties of the contacting surfaces.
Find the value of the coefficient of friction. If the body is on an inclined plane with an angle of inclination a (Fig. 12), then it starts to move only when the tangential component F of the gravity P is greater than the friction force F tr. Therefore, in the limiting case (the beginning of the sliding of the body) F=F tr. or P sin a 0 = f N = f P cos a 0 , whence
f = tga 0.
Thus, the coefficient of friction is equal to the tangent of the angle a 0 at which the body begins to slide along the inclined plane.
For smooth surfaces, intermolecular attraction begins to play a certain role. For them apply sliding friction law
F tr = f ist ( N + Sp 0) ,
where R 0 - additional pressure due to the forces of intermolecular attraction, which rapidly decrease with increasing distance between the particles; S- contact area between bodies; f ist - the true coefficient of sliding friction.
Friction plays an important role in nature and technology. Thanks to friction, transport moves, a nail hammered into the wall is held, etc.
In some cases, the friction forces have a harmful effect and therefore they must be reduced. To do this, a lubricant is applied to the rubbing surfaces (the friction force decreases by about 10 times), which fills the irregularities between these surfaces and is located in a thin layer between them so that the surfaces seem to stop touching each other, and separate layers of liquid slide relative to each other. Thus, the external friction of solids is replaced by a much smaller internal friction of the liquid.

A radical way to reduce the friction force is to replace sliding friction with rolling friction (ball and roller bearings, etc.). The rolling friction force is determined according to the law established by Coulomb:
F tr = f to N/r , (8.1)
where r- radius of the rolling body; f k - coefficient of rolling friction, having the dimension dim f to =L. From (8.1) it follows that the rolling friction force is inversely proportional to the radius of the rolling body.
Law of conservation of momentum. Center of mass
To derive the law of conservation of momentum, consider some concepts. The set of material points (bodies) considered as a whole is called mechanical system. The forces of interaction between the material points of a mechanical system are called - internal. The forces with which external bodies act on the material points of the system are called external. A mechanical system of bodies that is not acted upon by external forces is called closed(or isolated). If we have a mechanical system consisting of many bodies, then, according to Newton's third law, the forces acting between these bodies will be equal and oppositely directed, i.e., the geometric sum of internal forces is equal to zero.
Consider a mechanical system consisting of n bodies whose mass and speed are respectively equal m 1 , m 2 , .... m n, and v 1 , v 2 ,..., v n. Let - resultant internal forces acting on each of these bodies, a - resultant external forces. We write down Newton's second law for each of n bodies of the mechanical system:

Adding these equations term by term, we obtain
But since the geometric sum of the internal forces of a mechanical system is equal to zero according to Newton's third law, then
![]() (9.1)
(9.1)
where is the momentum of the system. Thus, the time derivative of the momentum of a mechanical system is equal to the geometric sum of the external forces acting on the system.
In the absence of external forces (we consider a closed system)
The last expression is law of conservation of momentum: the momentum of a closed system is conserved, i.e. does not change over time.
The momentum conservation law is valid not only in classical physics, although it was obtained as a consequence of Newton's laws. Experiments prove that it is also true for closed systems of microparticles (they obey the laws of quantum mechanics). This law is universal, i.e. the law of conservation of momentum - fundamental law of nature.
The law of conservation of momentum is a consequence of a certain property of the symmetry of space - its homogeneity. Homogeneity of space lies in the fact that during parallel transfer in space of a closed system of bodies as a whole, its physical properties and laws of motion do not change, in other words, do not depend on the choice of the position of the origin of the inertial reference frame.
Note that, according to (9.1), the momentum is also conserved for an open system if the geometric sum of all external forces is equal to zero.
In Galileo-Newtonian mechanics, due to the independence of mass from velocity, the momentum of a system can be expressed in terms of the velocity of its center of mass. center of gravity(or center of inertia) system of material points is called an imaginary point With, the position of which characterizes the mass distribution of this system. Its radius vector is
where m i and r i- respectively mass and radius vector i-th material point; n- number of material points in the system; is the mass of the system. Center of mass speed

Given that pi = m i v i, a is the momentum R systems, you can write
i.e., the momentum of the system is equal to the product of the mass of the system and the velocity of its center of mass.
Substituting expression (9.2) into equation (9.1), we obtain
![]() (9.3)
(9.3)
i.e., the center of mass of the system moves as a material point at which the mass of the entire system is concentrated and on which a force acts equal to the geometric sum of all external forces applied to the system. Expression (9.3) is law of motion of the center of mass.
In accordance with (9.2), it follows from the law of conservation of momentum that the center of mass of a closed system either moves in a straight line and uniformly, or remains stationary.
Equation of motion of a body of variable mass
The movement of some bodies is accompanied by a change in their mass, for example, the mass of a rocket decreases due to the outflow of gases formed during the combustion of fuel, etc.
Let us derive the equation of motion of a body of variable mass on the example of the motion of a rocket. If at the time t rocket mass m, and its speed is v, then after time d t its mass will decrease by d m and become equal t - d m, and the speed becomes equal to v + dv. Change in the momentum of the system over a time interval d t
where u is the speed of the outflow of gases relative to the rocket. Then
![]()
(taken into account that d m dv - small of a higher order of smallness in comparison with the rest). If external forces act on the system, then dp=Fd t, That's why
![]() (10.1)
(10.1)
The second term on the right side of (10.1) is called reactive force Fp. If u is opposite to v in direction, then the rocket accelerates, and if it coincides with v, then it slows down.
So we got equation of motion of a body of variable mass
which was first bred by I. V. Meshchersky (1859-1935).
The idea of using reactive force to create aircraft was expressed in 1881 by N. I. Kibalchich (1854-1881). K. E. Tsiolkovsky (1857-1935) in 1903 published an article where he proposed the theory of rocket motion and the foundations of the theory of a liquid-propellant jet engine. Therefore, he is considered the founder of Russian astronautics.
Let us apply equation (10.1) to the motion of a rocket, which is not affected by any external forces. Assuming F=0 and assuming that the speed of the ejected gases relative to the rocket is constant (the rocket moves in a straight line), we get
![]()
![]()
The value of the constant of integration With determine from the initial conditions. If at the initial moment of time the speed of the rocket is zero, and its starting mass m 0 , then With= u ln( m 0). Hence,
v= u log ( m 0 /m). (10.3)
This ratio is called Tsiolkovsky's formula. It shows that: 1) the greater the final mass of the rocket t, the greater should be the launch mass of the rocket m 0; 2) the greater the speed of expiration and gases, the greater the final mass can be for a given launch mass of the rocket.
Expressions (10.2) and (10.3) were obtained for nonrelativistic motions, i.e., for cases where the velocities v and u are small compared to the speed c of light propagation in vacuum.
test questions
LITERATURE
Main
Sotsky N.B. Biomechanics. - Mn: BGUFK, 2005.
Nazarov V.T. Athlete movements. M., Polymya 1976
Donskoy D.D. Zatsiorsky V.M. Biomechanics: Textbook for institutes of physical culture.- M., Physical culture and sport, 1979.
Zagrevskiy V.I. Biomechanics of physical exercises. Tutorial. - Mogilev: Moscow State University named after A.A. Kuleshova, 2002.
Additional
Nazarov V.T. Biomechanical stimulation: reality and hopes.-Mn., Polymya, 1986.
Utkin V.L. Biomechanics of physical exercises. - M., Education, 1989.
Sotsky N.B., Kozlovskaya O.N., Korneeva Zh.V. Course of laboratory work on biomechanics. Minsk: BGUFK, 2007.
Newton's laws for translational and rotational motion.
The formulation of Newton's laws depends on the nature of the motion of bodies, which can be represented as a combination of translational and rotational motions.
When describing the laws of the dynamics of translational motion, it should be taken into account that all points of a physical body move in the same way, and to describe the laws of this movement, one can replace the entire body with one point containing the amount of matter corresponding to the entire body. In this case, the law of motion of the body as a whole in space will not differ from the law of motion of the specified point.
Newton's first law establishes the cause that causes movement or changes its speed. Such a reason is the interaction of the body with other bodies. This is noted in one of the formulations of Newton's first law: "If other bodies do not act on a body, then it retains a state of rest or uniform rectilinear motion."
The measure of the interaction of bodies, as a result of which the nature of their movement changes, is force. Thus, if any physical body, for example, the body of an athlete, has acquired acceleration, then the cause should be sought in the action of a force from another body.
Using the concept of force, one can formulate Newton's first law in a different way: "If no forces act on a body, then it retains a state of rest or uniform rectilinear motion."
Newton's second law establishes a quantitative relationship between the force of interaction of bodies and the acquired acceleration. So, during translational motion, the acceleration acquired by the body is directly proportional to the force acting on the body. The greater the specified force, the greater the acceleration acquires the body.
To take into account the properties of interacting bodies, which manifest themselves when imparting acceleration to them, a coefficient of proportionality between the force and acceleration is introduced, which is called the mass of the body. The introduction of mass allows us to write Newton's second law in the form:
a = -- (2.1)
where a- acceleration vector; F- force vector; m - body weight.
It should be noted that in the above formula, acceleration and force are vectors, therefore, they are not only proportionally related, but also coincide in direction.
The mass of a body, introduced by Newton's second law, is associated with such a property of bodies as inertia. It is a measure of this property. The inertia of a body is its ability to resist a change in speed. So, a body that has a large mass and, accordingly, inertia, is difficult to disperse and no less difficult to stop.
Newton's third law gives an answer to the question of how bodies interact. He argues that in the interaction of bodies, the force of action from one body on another is equal in magnitude and opposite in direction to the force acting from the other body on the first.
For example, a shot putter, dispersing its projectile, acts on it with a certain force F, at the same time the force of the same magnitude, but opposite in direction, acts on the athlete's hand and through it on the whole body as a whole. If this is not taken into account, the athlete may not be kept within the throwing area, and the attempt will not be counted.
If a physical body interacts simultaneously with several bodies, all acting forces are added according to the vector addition rule. In this case, Newton's first and second laws mean the resultant of all forces acting on the body.
Dynamic characteristics of translational motion (force, mass).
The measure of the interaction of bodies, as a result of which the nature of their movement changes, is force. Thus, if any physical body, for example, the body of an athlete, has acquired acceleration, then the cause should be sought in the action of a force from another body. For example, when performing a high jump, the vertical speed of the athlete's body after taking off from the support until reaching the highest position decreases all the time. The reason for this is the force of interaction between the athlete's body and the earth - the force of gravity. In rowing, both the cause of the acceleration of the boat and the cause of its deceleration is the drag force of the water. In one case, by acting on the hull of the boat, it slows down the movement, and in the other, by interacting with the oar, it increases the speed of the vessel. As can be seen from the above examples, forces can act both at a distance and in direct contact of interacting objects.
It is known that the same force, acting on different bodies, leads to different results. For example, if a middleweight wrestler tries to push an opponent in his weight class and then a heavyweight athlete, then the accelerations acquired in both cases will differ markedly. Thus, the body of a middleweight opponent will gain more acceleration than in the case of a heavyweight opponent.
To take into account the properties of interacting bodies, which manifest themselves when imparting acceleration to them, a coefficient of proportionality between the force and acceleration is introduced, which is called the mass of the body.
More strictly speaking, if different bodies are acted upon by the same force, then the most rapid change in velocity over the same period of time will be observed for the least massive body, and the slowest for the most massive.
Dynamic characteristics of rotational motion (moment of force, moment of inertia).
In the case of rotational motion of the body, the formulated laws of dynamics are also valid, but they use somewhat different concepts. In particular, "force" is replaced by "moment of force", and "mass" - by the moment of inertia.
Moment of power is a measure of the interaction of bodies during rotational motion. It is determined by the product of the magnitude of the force by the arm of this force with respect to the axis of rotation. The shoulder of the force is the shortest distance from the axis of rotation to the line of action of the force. So, when performing a large turn on the crossbar in the situation shown in Fig. 13, the athlete performs a rotational movement under the influence of gravity. The magnitude of the moment of force is determined by the force of gravity mg and the shoulder of this force relative to the axis of rotation d. In the process of performing a large revolution, the rotational action of gravity changes in accordance with the change in the magnitude of the arm of the force.
Rice. 13. The moment of gravity when performing a large rotation on the crossbar
So, the minimum value of the moment of force will be observed in the upper and lower positions, and the maximum - when the body is located close to horizontal. The moment of force is a vector. Its direction is perpendicular to the plane of rotation and is determined by the "gimlet" rule. In particular, for the situation shown in Fig., the vector of the moment of force is directed "away from the observer" and has a "minus" sign.
In the case of plane movements, it is convenient to determine the sign of the moment of force from the following considerations: if the force acts on the shoulder, trying to turn it in the "counterclockwise" direction, then this moment of force has a "plus" sign, and if "clockwise" - then the sign "minus".
According to the first law of the dynamics of rotational motion, the body maintains a state of rest (in relation to rotational motion) or uniform rotation in the absence of moments of forces acting on it or if the total moment is equal to zero.
Newton's second law for rotational motion is:
e = --- (2.2)
where e- angular acceleration; M- moment of power; J is the moment of inertia of the body.
According to this law, the angular acceleration of a body is directly proportional to the moment of force acting on it and inversely proportional to its moment of inertia.
Moment of inertia is a measure of the body's inertia during rotational motion. For a material point of mass m located at a distance r from the axis of rotation, the moment of inertia is defined as J = mr 2 . In the case of a rigid body, the total moment of inertia is defined as the sum of the moments of inertia of its constituent points and is found using the mathematical operation of integration.
The main forces that take place when performing physical exercises.
The force of gravity of a body located near the surface of the earth can be determined by the mass of the body m and the free fall acceleration g:
F= m g (2.30)
The force of gravity acting on a physical body from the side of the earth is always directed vertically downwards and is applied in the common center of gravity of the body.
Support reaction force acts on the physical body from the side of the support surface and can be decomposed into two components - vertical and horizontal. Horizontal in most cases is a friction force, the laws of which will be discussed below. The vertical reaction of the support is numerically determined by the following relationship:
R = ma + mg (2.31)
where a is the acceleration of the center of mass of the body in contact with the support.
Friction force. The force of friction can manifest itself in two ways. This may be the friction force that occurs when walking and running, as a horizontal reaction of the support. In this case, as a rule, the link of the body interacting with the support does not move relative to the latter, and the friction force is called the "friction-rest force". In other cases, there is a relative movement of the interacting links, and the resulting force is a friction-sliding force. It should be noted that there is a friction force acting on a rolling object, for example, a ball or a wheel - friction-rolling, however, the numerical relationships that determine the magnitude of such a force are similar to those that occur during friction-sliding, and we will not consider them separately.
The magnitude of friction-rest is equal to the magnitude of the applied force tending to move the body. This situation is most typical for bobsleigh. If the projectile being moved is at rest, then a certain force must be applied to start moving it. In this case, the projectile will begin to move only when this force reaches a certain limit value. The latter depends on the state of the contacting surfaces and on the pressure force of the body on the support.
When the shear force exceeds the limit value, the body begins to move, to slide. Here, the friction-sliding force becomes somewhat less than the limit value of friction-rest, at which the movement begins. In the future, it depends to some extent on the relative speed of the surfaces moving relative to each other, however, for most sports movements, it can be considered approximately constant, determined by the following relationship:
where k is the coefficient of friction and R is the normal (perpendicular to the surface) component of the support reaction.
The forces of friction in sports movements, as a rule, play both a positive and a negative role. On the one hand, without the force of friction it is impossible to ensure the horizontal movement of the athlete's body. For example, in all disciplines related to running, jumping, in sports games and martial arts, they strive to increase the coefficient of friction between sports shoes and the support surface. On the other hand, during competitions in cross-country skiing, ski jumping, luge, bobsleigh, downhill, the first task that ensures high sports performance is to reduce the amount of friction. Here this is achieved by selecting appropriate materials for skis and sleds or by providing appropriate lubrication.
The force of friction is the basis for creating a whole class of training devices for the development of specific qualities of an athlete, such as strength and endurance. For example, in some very common designs of bicycle ergometers, the friction force quite accurately sets the load for the trainee.
Environmental resistance forces. When performing sports exercises, the human body always experiences the action of the environment. This action can manifest itself both in the difficulty of movement, and provide the possibility of the latter.
The force acting from the side of the flow impinging on the moving body can be represented as consisting of two terms. This is - drag force, directed in the direction opposite to the movement of the body, and lifting force acting perpendicular to the direction of motion. When performing sports movements, the resistance forces depend on the density of the medium r, the speed of the body V relative to the medium, the area of the body S (Fig. 24), perpendicular to the incoming flow of the medium, and the coefficient C, depending on the shape of the body:
F resist= СSrV 2 (2.33)
Rice. 24. The area perpendicular to the incident flow, which determines the magnitude of the force
resistance.
elastic forces. Elastic forces arise when changing the shape (deforming) of various physical bodies, restoring the original state after the removal of the deforming factor. An athlete encounters such bodies when performing trampolining, pole vaulting, and when performing exercises with rubber or spring shock absorbers. The elastic force depends on the properties of the deformable body, expressed by the coefficient of elasticity K, and the magnitude of the change in its shape Dl:
F ex.= - KDl (2.35)
The buoyancy force depends on the volume V of the body or part of it immersed in a medium - air, water or any other liquid, the density of the medium r and the free fall acceleration g.
1) Newton's laws. Forces in nature.
2) The main characteristics of the dynamics of rotational motion.
3) work and power. mechanical energy.
4) Laws of conservation of mechanics.
Kinematics considers the movement of bodies, without being interested in the reasons for this movement and its change.
At the core dynamics, which studies the causes of changes in motion, are Newton's laws. These laws are among the fundamental laws of nature and can only be proven or refuted by experience.
Newton's second law is the basic law of dynamics.
This law only applies to inertial frames of reference.
In dynamics, two new physical quantities are introduced - body mass m and force https://pandia.ru/text/78/157/images/image001_74.gif" width="23" height="26 src=">is quantitative measure of the action of one body on another.
Newton's second law is a fundamental law of nature; it is a generalization of empirical facts, which can be divided into two categories:
1. If bodies of different masses are affected by the same force, then the accelerations acquired by the bodies turn out to be inversely proportional to the masses
2. If forces of different magnitudes act on the same body, then the accelerations of the body are directly proportional to the applied forces.
Summarizing such observations, Newton formulated the basic law of dynamics: The force acting on a body is equal to the product of the mass of the body and the acceleration imparted by this force:
https://pandia.ru/text/78/157/images/image001_74.gif" width="23" height="26 src=">:
In the International System of Units (SI), the unit of force is the force that imparts an acceleration of 1 m/s2 to a body with a mass of 1 kg. This unit is called newton (N).
https://pandia.ru/text/78/157/images/image005_17.gif" width="97" height="60">
If the resultant force is zero, then the body will remain in a state of rest or uniform rectilinear motion.
Newton's second law can also be written as:
https://pandia.ru/text/78/157/images/image007_8.gif" width="96" height="36"> (4).
The basic unit of body momentum in SI is kg m/s.
Then Newton's second law finally takes the form:
Thus, the rate of change of momentum of the body is equal to the force acting on it.
Forces in nature.
1) The force of gravity. Gravity. Body weight.
https://pandia.ru/text/78/157/images/image010_6.gif" width="134" height="57 src="> (6)
where  - gravitational constant, numerically equal to the force of interaction of two bodies of unit mass, located at a unit distance from each other.
- gravitational constant, numerically equal to the force of interaction of two bodies of unit mass, located at a unit distance from each other.
The force of universal gravitation is the central force, i.e., directed along the straight line connecting the centers of the bodies.
Under the influence of gravity to the Earth, all bodies fall with the same acceleration equal to the acceleration of free fall ..gif" width="20" height="28 src=">.gif" width="69" height="28 src="> .
The force with which a body acts on a support or suspension, due to attraction to the Earth, is called body weight.
2) Forces of friction.

Friction forces appear when two contacting bodies or body parts move relative to each other.
Friction forces are directed tangentially to the rubbing surfaces, and in such a way that they counteract the relative displacement of these surfaces.
In the case of dry friction, the frictional force arises not only when one surface slides over another, but also when trying to cause such a displacement. In this case, the friction force is called static friction force.
Experience shows that the maximum static friction force https://pandia.ru/text/78/157/images/image019_6.gif" width="105" height="34 src="> (7)
where N is the normal pressure force, is a dimensionless coefficient that depends on the type of contacting bodies and the cleanliness of the surface treatment and is called coefficient
friction.
It should be borne in mind that, in addition to friction forces, when moving in a liquid or gas, environmental resistance forces arise, which can be much greater than the friction forces. A characteristic feature of these forces is their dependence on the speed of the body and its shape.
If two forces act on the shaft with the disk https://pandia.ru/text/78/157/images/image022_6.gif" width="83" height="19">, i.e. when moments of forces equal in magnitude and opposite in direction.
Pseudovector
https://pandia.ru/text/78/157/images/image024_3.gif" width="21" height="33 src="> relative to point O.
The vector modulus is determined by the formula
https://pandia.ru/text/78/157/images/image027_2.gif" width="99" height="23"> - the shoulder of the force, i.e. the shortest distance from point O to the line of action of the force.
the value
https://pandia.ru/text/78/157/images/image029_1.gif" width="105" height="51 src="> (11)
called angular momentum of a rigid body about a point.
physical quantity
![]() (12)
(12)
called moment of inertia of a material point relative to the axis of rotation, and the value
![]() (13)
(13)
moment of inertia of a rigid body.
Any rigid body can be divided into elementary masses https://pandia.ru/text/78/157/images/image033_1.gif" width="20 height=24" height="24"> from the axis of rotation..gif" width ="133" height="38"> (14),
where https://pandia.ru/text/78/157/images/image037_1.gif" width="14" height="25"> is the moment of inertia relative to the new axis, is the distance between the axes, https://pandia. ru/text/78/157/images/image040_1.gif" width="90" height="33 src="> (15).
As  , then you can find another form of writing this law:
, then you can find another form of writing this law:
https://pandia.ru/text/78/157/images/image043_1.gif" width="19" height="29 src=">.gif" width="13" height="25 src=">, then the work of this force is determined by the formula
https://pandia.ru/text/78/157/images/image047_0.gif" width="24" height="20">, so that they can be considered rectilinear, and the acting force at any point of this section is constant Then the elementary work
https://pandia.ru/text/78/157/images/image049_0.gif" width="183" height="42 src="> (19)
If A > 0, if https://pandia.ru/text/78/157/images/image052_0.gif" width="48" height="47"> , then A = 0
To characterize the rate of work, a physical quantity is introduced, called power. If work is done in time https://pandia.ru/text/78/157/images/image055_0.gif" width="74" height="53 src="> (20)
called average power, and the value
https://pandia.ru/text/78/157/images/image057_0.gif" width="100" height="23"> can be obtained
https://pandia.ru/text/78/157/images/image059_0.gif" width="92" height="65 src="> (23)
called the kinetic energy of the body.
The work of the resultant of all forces acting on the body is equal to the change in the kinetic energy of the body.
https://pandia.ru/text/78/157/images/image061.gif" width="84" height="58 src="> (25)
The elementary work of a variable force during rotational motion is:
https://pandia.ru/text/78/157/images/image063.gif" width="116" height="69 src="> (27)
Mechanical power during rotational motion is determined by the expression:
https://pandia.ru/text/78/157/images/image071.gif" width="218" height="33 src="> (33)
is called the momentum of a system of bodies (particles) and then
For a closed system of bodies, the resultant of all external forces is zero, i.e..gif" width="62" height="56">,
is called the total mechanical energy of the system and then
![]() (38),
(38),
the total mechanical energy of the system changes by the value of the work of the external force.
From this equation follows the impossibility of creating a perpetual motion machine of the first kind, i.e., an engine that would do more work than the energy expended.
For a closed system, the work of external forces is zero, and therefore https://pandia.ru/text/78/157/images/image083.gif" width="89 height=24" height="24">
This statement expresses law of energy conservation: total mechanical energy of a closed system
remains constant.
The equation of the dynamics of the translational motion of the body:
where m- body mass,  - its acceleration
- its acceleration  is the sum of all forces acting on the body.
is the sum of all forces acting on the body.
The momentum of a body is the product of the mass of the body and its speed:  .
.
Momentum change law:
 =
=
 .
.
By the work of strength F on the move ds is called the product of the projection of the force on the direction of displacement by this displacement:
dA = F s ds = fds cosα,
where α is the angle between the directions of force and displacement.
The work of a variable force is calculated as:
A
=
 .
.
Power is the work done per unit of time. N
=
 .
.
Instantaneous power is equal to the scalar product of the force acting on the body and its speed:
N
=
 .
.
Kinetic energy of the body in translational motion:
 ,
,
where m- body mass, υ - its speed.
Potential energy of the body
– in a uniform gravitational field:
E P = mgh
(m - body mass, g - acceleration of gravity, h is the height of the body above the point at which the potential energy is assumed to be zero);
– in the field of elastic forces:
E n = 
(k is the stiffness coefficient of the elastic body, x- displacement from the equilibrium position).
In a closed system of particles, the total momentum of the system does not change during its motion:
Σ
 =
const.
=
const.
In a closed conservative system of particles, the total mechanical energy is conserved:
E=E k + E P = const.
The work of resistance forces is equal to the decrease in the total energy of a system of particles or a body: A conp = E 1 – E 2 .
Examples of problem solving
Task 5
The rope lies on the table so that part of it hangs from the table, and begins to slide when the length of the hanging part is 25% of its entire length. What is the coefficient of friction of the rope on the table?
Decision
Let us mentally cut the rope at the bend and connect both parts with a weightless inextensible thread. When the rope just starts to slide, all forces will balance (since it is moving without acceleration yet), and the friction force reaches the magnitude of the sliding friction force, F tr = μ Ν .
Conditions for the balance of forces:
mg
= N

F tr = T
tr = T


mg
=
T
m 

Hence: μ mg= mg,
Task 6
The weightless block is fixed on the top of an inclined plane making an angle α = 30 o with the horizon. body BUT and AT equal mass m 1 = m 2 =1kg connected by thread. Find: 1) the acceleration with which the bodies move, 2) the tension of the thread. Friction in the block and friction of the body AT neglect the inclined plane.

Decision
 x y Let us write down the equations of motion of both bodies:
x y Let us write down the equations of motion of both bodies:

 BUT:m
BUT:m  =
m
=
m  +
+


 x x xAT:m
x x xAT:m  =
m
=
m  +
+
 +
+

In projections for the body BUT:
– ma= T–mg (3)
For body AT along the axis X:
– ma =–T + mg sin (4)
0= N–mg cos (5)
If we add equations (3) and (4), we get:
–2ma =– mg + mg sin, or
a
=
g
Substituting this value, for example, into equation (3) (possibly in (4)), we obtain: T
=
mg
–
ma
=
mg

We substitute numerical values:
a
= 9,8 =
=
 = 2,45
= 2,45

T
= 1
∙
9,8 = 7.35H
= 7.35H
Task 7
A car weighing 20 tons, moving uniformly, under the action of a friction force of 6 kN, stopped after some time. The initial speed of the car is 54 km/h. Find: 1) the work of friction forces; 2) the distance that the car will travel before stopping.
Decision
The work is equal to the increment of the kinetic energy of the body:
A tr = 0 -  = –
= –
 ,
,
The “–” sign means that the work of the friction forces is negative, since the friction forces are directed against the movement.
On the other hand, the work of the friction force can be calculated through the product of the force and the path:
A tr = F tr. S,
from here S=
 =
=

Substituting numerical values:
m = 2 . 10 4 kg, F tr = 6 . 10 3 N, υ = 15 ,
A tr =  = 2.25. 10 6 J = 2.25 MJ,
= 2.25. 10 6 J = 2.25 MJ,
S
=
 = 358 m.
= 358 m.
Task 8
A stone is thrown at an angle α \u003d 60 about to the horizon with speed υ 0 =15 m/s. Find the kinetic, potential and total energy of the stone: 1) one second after the start of motion; 2) at the highest point of the trajectory. Mass of stone m = 0.2 kg. Ignore air resistance.
Decision
Let's choose an axis X- horizontally, and the axis at- vertically.
Speed projections:
υ x = υ 0 cos , (6)
υ about υ y = υ 0 sin - gt (7)
x At the point in time t the speed modulus is determined from the ratio:
υ 2 = υ 0 2 cos 2 + (υ 0 sin – gt) 2 = υ 0 2 – 2 υ 0 gt sin + g 2 t 2 .
The height of the stone above the ground at a time t is determined from the ratio:
h
= υ
0 sin -
 .
(8)
.
(8)
Finding kinetic, potential and total energy at a moment of time t:
E k
=
 =
=
 (
υ
0 2
–
2
υ
0
gt sin +
g 2 t 2),
(
υ
0 2
–
2
υ
0
gt sin +
g 2 t 2),
E P
=mgh=
 (2
υ
0
gt sin -
g 2 t 2),
(2
υ
0
gt sin -
g 2 t 2),
E
=
E k
+
E P =
 .
.
At the highest point of the trajectory υ
y= 0. The stone reaches this point in the time  =
= (from (7)), and the maximum lifting height h max=
(from (7)), and the maximum lifting height h max=  (from (8)).
(from (8)).
E k
=
 =
=
 ,
,
E P
= mgh max
=
 ,
,
E=E k
+E P
=
 .
.
We substitute numerical values. At the point in time t = 1 s.
E k = 17.4 J, E P = 5.1 J E = 22.5 J
At the highest point of the trajectory:
E k = 16.9 J, E n = 5.6 J, E = 22.5 J
Task9
On rails there is a platform of mass m 1 = 10 t, a tool of mass m 2 = 5 t, from which a shot is fired along the rails. Projectile weight m 3 = 100 kg, its initial speed relative to the gun υ 0 = 500 m/s. Determine speed υ x platform at the first moment of time, if: 1) the platform was stationary, 2) the platform was moving at a speed υ 1 = 18km/h, and the shot was fired in the direction of its movement, 3) the platform was moving at a speed υ 1 = 18 km / h, and the shot was fired in the direction opposite to its movement.
Decision
According to the law of conservation of momentum, the momentum of a closed system before any event (in this case, a shot) must be equal to its momentum after the event. For positive, we choose the direction of the projectile velocity. Before the shot, the entire system had momentum ( m 1 +m 2 +m 3)υ 1 , after the shot, the platform with the gun moves at a speed υ x, their momentum ( m 1 +m 2)υ x, and the projectile relative to the ground moves with a speed υ 0 + υ 1 , its momentum m 3 (υ 0 +υ one). The law of conservation of momentum is written as follows:
(m 1 + m 2 + m 3) υ 1 = (m 1 + m 2) υ x + m 3 (υ 0 + υ 1),
from here
υ
x
=
 =υ
1
–
=υ
1
–
 υ
0 .
υ
0 .
Substitute the values of the masses, υ 1 and υ 0:
1) υ 1 = 0
υ x = - 3.33 m/s.
The minus sign means that the platform with the gun is moving opposite to the direction of the projectile;
2) υ 1 = 18 km/h = 5 m/s,
υ x \u003d 5 - 3.33 \u003d 1.67 m / s.
The platform with the gun continues to move in the direction of the shot, but at a slower speed;
3) υ 1 = - 18 km/h = - 5 m/s
υ x = - 5 - 3.33 = - 8.33 m/s.
The speed of the platform moving in the opposite direction to the direction of the shot increases.
Task 10
A bullet flying horizontally hits a ball suspended on a light rigid rod and gets stuck in it. The mass of the bullet is 1000 times less than the mass of the ball. The distance from the suspension point of the rod to the center of the ball is 1 m. Find the speed of the bullet if it is known that the rod with the ball deviated from the impact by an angle of 10 o.
Decision.
E  if the bullet gets stuck in the ball, then the blow
if the bullet gets stuck in the ball, then the blow
absolutely inelastic, and only the law of conservation of momentum is satisfied. Before impact, the bullet had momentum mυ , the ball had no momentum. Immediately after impact, the ball and bullet have a common velocity υ 1 , their momentum ( M+ m) υ 1 .
Law of conservation of momentum:
m υ = (M+ m) υ 1 ,
from here
υ
1
=
 υ.
υ.
The ball, together with the bullet, acquired kinetic energy at the moment of impact:
E k =
 υ
1 2
=
υ
1 2
=

 υ
2
=
υ
2
=
 .
.
Due to this energy, the ball rose to a height h, while its kinetic energy is converted into potential:
E k = E p
 =
(M+
m)
gh.
(9)
=
(M+
m)
gh.
(9)
Height h can be expressed in terms of the distance from the suspension point to the center of the ball and the angle of deviation from the vertical
h = L – L cos = L(1 – cos ).
Substituting the last expression into relation (9), we obtain:
L
 =
gL(1 – cos ),
=
gL(1 – cos ),
h and determine the speed of the bullet:
υ
=
 .
.
Substituting the numerical values, we get:
υ
= 1001 543 m/s.
543 m/s.
Task 11
A stone tied to a rope rotates uniformly in a vertical plane. Find the mass of the stone if it is known that the difference between the maximum and minimum tensions on the rope is 9.8 N.
Decision
At the top of the trajectory, both gravity and 
 rope tension is directed downward.
rope tension is directed downward.
L The equation of motion at the top point is:

 =
mg
+ T 1 .
=
mg
+ T 1 .
At the bottom of the trajectory, the force of gravity is directed downwards, while the tension of the rope and normal acceleration are directed upwards. The equation of motion at the bottom point:
ma n
=
m
 =
T 2
–
mg.
=
T 2
–
mg.
By convention, the stone rotates at a constant speed, so the left-hand sides of both equations are the same. So we can equate the right sides:
mg + T 1 = T 2 – mg,
from here T 2 – T 1 = 2mg,
m
=
 .
.
Plugging in the numbers: m
=
 = 0.5 kg.
= 0.5 kg.
Task 12
The highway has a curve with a slope of 10° with a curvature radius of 100 m. What speed is the curve designed for?
Decision
 The force acting on the car is
The force acting on the car is
from gravity  and normal pressure forces
and normal pressure forces  . The sum of these forces determines the normal acceleration of the car when turning.
. The sum of these forces determines the normal acceleration of the car when turning.
The triangle of forces shows that:  =tg .
=tg .
Calculate a n, reducing the mass
 = tan ,
= tan ,
from here υ
=
 =41.5 m/s.
=41.5 m/s.
Date: __________ Deputy Director for OIA: ___________
Subject; Newton's second law for rotational motion
Target:
Educational: determine and write down in mathematical form Newton's second law; explain the relationship between the quantities included in the formulas of this law;
Developing: develop logical thinking, the ability to explain the manifestations of Newton's second law in nature;
Educational : to form interest in the study of physics, to cultivate diligence, responsibility.
Type of lesson: learning new material.
Demonstrations: the dependence of the acceleration of a body on the force acting on it.
Equipment: trolley with light wheels, rotating disk, set of weights, spring, block, bar.
DURING THE CLASSES
Organizing time
Updating the basic knowledge of students
Formula chain (reproduce formulas):

II. Motivation of educational activity of students
Teacher. With the help of Newton's laws, one can not only explain the observed mechanical phenomena, but also predict their course. Recall that the direct main task of mechanics is to find the position and speed of a body at any moment of time, if its position and speed at the initial moment of time and the forces that act on it are known. This problem is solved with the help of Newton's second law, which we will study today.
III. Learning new material
1. The dependence of the acceleration of a body on the force acting on it
A more inert body has a large mass, a less inert body has a smaller one:
2. Newton's second law
Newton's second law of dynamics establishes a connection between kinematic and dynamic quantities. Most often, it is formulated as follows: the acceleration that a body receives is directly proportional to the mass of the body and has the same direction as the force:
where - acceleration, - resultant of forces acting on the body, N; m - body weight, kg.
If we determine the force from this expression, then we obtain the second law of dynamics in the following formulation: the force acting on the body is equal to the product of the body's mass and the acceleration provided by this force.
Newton formulated the second law of dynamics somewhat differently, using the concept of momentum (body momentum). Impulse - the product of body mass and its speed (the same as the amount of motion) - one of the measures of mechanical movement: Impulse (momentum) is a vector quantity. Since the acceleration

Newton formulated his law as follows: the change in the momentum of a body is proportional to the acting force and occurs in the direction of the straight line along which this force acts.
It is worth considering another of the formulations of the second law of dynamics. In physics, a vector quantity is widely used, which is called the impulse of a force - this is the product of the force and the time of its action: Using this, we get ![]() . The change in momentum of a body is equal to the momentum of the force acting on it.
. The change in momentum of a body is equal to the momentum of the force acting on it.
Newton's second law of dynamics summarized an extremely important fact: the action of forces does not cause actual motion, but only changes it; force causes a change in speed, i.e. acceleration, not speed itself. The direction of the force coincides with the direction of the velocity only in the partial case of rectilinear evenly accelerated (Δ 0) motion. For example, during the movement of a body thrown horizontally, the force of gravity is directed downward, and the velocity forms a certain angle with the force, which changes during the flight of the body. And in the case of uniform motion of the body in a circle, the force is always directed perpendicular to the speed of the body.
The SI unit of force is determined based on Newton's second law. The unit of force is called [H] and is defined as follows: a force of 1 newton imparts an acceleration of 1 m/s2 to a body of mass 1 kg. Thus,
![]()
Application examples of Newton's second law
As an example of the application of Newton's second law, one can consider, in particular, the measurement of body mass by weighing. An example of the manifestation of Newton's second law in nature can be a force that acts on our planet from the Sun, etc.
Limits of application of Newton's second law:
1) the reference system must be inertial;
2) the speed of the body must be much less than the speed of light (for speeds close to the speed of light, Newton's second law is used in impulsive form: ).
IV. Fixing the material
Problem solving
1. A body with a mass of 500 g is simultaneously affected by two forces 12 N and 4 N, directed in the opposite direction along one straight line. Determine the modulus and direction of acceleration.

Given: m = 500 g = 0.5 kg, F1 = 12 N, F2 = 4 N.
Find: a - ?
According to Newton's second law: , where Let's draw the axis Ox, then the projection F = F1 - F2. Thus,

![]()
Answer: 16 m/s2, the acceleration is in the direction of the greater force.
2. The coordinate of the body changes according to the law x = 20 + 5t + 0.5t2 under the action of a force of 100 N. Find the mass of the body.
Given: x = 20 + 5t + 0.5t2, F = 100H
Find: m - ?
Under the action of a force, the body moves with equal acceleration. Therefore, its coordinate changes according to the law:

According to Newton's second law:

Answer: 100 kg.
3. A body with a mass of 1.2 kg acquired a speed of 12 m/s at a distance of 2.4 m under the action of a force of 16 N. Find the initial velocity of the body.
Given: = 12 m/s, s = 2.4m, F = 16H, m = 1.2 kg
Find: 0 - ?
Under the action of a force, the body acquires acceleration according to Newton's second law:
![]()
For evenly accelerated movement:

From (2) we express the time t:
![]()
and substitute for t in (1):

Substitute the expression for acceleration:

Answer: 8.9 m/s.
V. Lesson summary
Frontal conversation for questions
1. How are such physical quantities as acceleration, force and mass of a body related?
2. Or can it be stated by the formula that the force acting on a body depends on its mass and acceleration?
3. What is the momentum of the body (momentum)?
4. What is the impulse of force?
5. What formulations of Newton's second law do you know?
6. What important conclusion can be drawn from Newton's second law?
VI. Homework
Work through the relevant section of the textbook.
Solve problems:
1. Find the acceleration module of a body with a mass of 5 kg under the action of four forces applied to it, if:
a) F1 = F3 = F4 = 20 H, F2 = 16 H;
b) F1 = F4 = 20 H, F2 = 16 H, F3 = 17 H.

2. A body with a mass of 2 kg, moving in a straight line, changed its speed from 1 m/s to 2 m/s in 4 s.
a) What is the acceleration of the body?
b) What force acted on the body in the direction of its motion?
c) How has the momentum of the body (momentum) changed over the time considered?
d) What is the impulse of the force acting on the body?
e) What is the distance traveled by the body during the considered time of motion?