DIFFERENZIALRECHNUNG VON FUNKTIONEN MEHRERER VARIABLEN.
Grundbegriffe und Definitionen.
Bei der Betrachtung von Funktionen mehrerer Veränderlicher beschränken wir uns auf eine ausführliche Beschreibung von Funktionen zweier Veränderlicher, da alle erhaltenen Ergebnisse gelten für Funktionen einer beliebigen Anzahl von Variablen.
Wenn jedem Paar voneinander unabhängiger Zahlen (x, y) aus einer bestimmten Menge nach einer bestimmten Regel ein oder mehrere Werte der Variablen z zugewiesen werden, wird die Variable z aufgerufen Funktion zweier Variablen.
Entspricht ein Zahlenpaar (x, y) einem Wert von z, so wird die Funktion aufgerufen eindeutig, und wenn mehr als eins, dann - zweideutig.
Definitionsbereich die Funktion z ist die Menge der Paare (x, y), für die die Funktion z existiert.
Nachbarschaftspunkt M 0 (x 0, y 0) mit Radius r ist die Menge aller Punkte (x, y), die die Bedingung erfüllen.
Die Nummer A wird gerufen Grenze Funktion f(x, y), da der Punkt M(x, y) zum Punkt M 0 (x 0, y 0) tendiert, wenn es für jede Zahl e > 0 eine solche Zahl r > 0 gibt, die für jeden Punkt M gilt (x, y) für die die Bedingung
die Bedingung ist auch wahr ![]() .
.
Aufschreiben: ![]()
Der Punkt M 0 (x 0, y 0) gehöre zum Definitionsbereich der Funktion f(x, y). Dann wird die Funktion z = f(x, y) aufgerufen kontinuierlich am Punkt M 0 (x 0, y 0), wenn
![]() (1)
(1)
außerdem tendiert der Punkt M(x, y) auf willkürliche Weise zum Punkt M 0 (x 0, y 0).
Ist Bedingung (1) an keiner Stelle erfüllt, so wird diese Stelle aufgerufen Bruchpunkt Funktionen f(x, y). Dies kann in folgenden Fällen der Fall sein:
1) Die Funktion z \u003d f (x, y) ist am Punkt M 0 (x 0, y 0) nicht definiert.
2) Es gibt keine Begrenzung.
3) Diese Grenze existiert, aber sie ist nicht gleich f(x 0 , y 0).
Eigenschaften von Funktionen mehrerer Veränderlicher in Bezug auf ihre Stetigkeit.
Eigentum. Wenn die Funktion f(x, y, …) in einem abgeschlossenen und beschränkten Gebiet D definiert und stetig ist, dann gibt es in diesem Gebiet mindestens einen Punkt
N(x 0 , y 0 , …) so dass die Ungleichung
f(x 0 , y 0 , …) ³ f(x, y, …)
sowie einen Punkt N 1 (x 01 , y 01 , ...), so dass für alle anderen Punkte die Ungleichung wahr ist
f(x 01 , y 01 , …) £ f(x, y, …)
dann f(x 0 , y 0 , …) = M – Höchster Wert Funktionen und f(x 01 , y 01 , ...) = m - kleinster Wert Funktionen f(x, y, …) im Definitionsbereich D.
Eine stetige Funktion in einem abgeschlossenen und beschränkten Gebiet D erreicht mindestens einmal ihren Maximalwert und einmal ihren Minimalwert.
Eigentum. Wenn die Funktion f(x, y, …) in einem geschlossenen begrenzten Bereich D definiert und stetig ist und M und m die größten bzw. kleinsten Werte der Funktion in diesem Bereich sind, dann für jeden Punkt m О dort ist ein Punkt
N 0 (x 0 , y 0 , …) so dass f(x 0 , y 0 , …) = m.
Einfach ausgedrückt nimmt eine stetige Funktion im Definitionsbereich D alle Zwischenwerte zwischen M und m an. Eine Folge dieser Eigenschaft kann der Schluss sein, dass, wenn die Zahlen M und m unterschiedliche Vorzeichen haben, die Funktion im Bereich D mindestens einmal verschwindet.
Eigentum. Funktion f(x, y, …), stetig in einem abgeschlossenen beschränkten Gebiet D, begrenzt in diesem Bereich, wenn es eine solche Zahl K gibt, dass für alle Punkte des Bereichs die Ungleichung gilt ![]() .
.
Eigentum. Wenn eine Funktion f(x, y, …) in einem abgeschlossenen beschränkten Bereich D definiert und stetig ist, dann ist es gleichmäßig kontinuierlich in diesem Bereich, d.h. für jede positive Zahl e gibt es eine solche Zahl D > 0, dass für zwei beliebige Punkte (x 1, y 1) und (x 2, y 2) der Region, die sich in einem Abstand von weniger als D befinden, die Ungleichung gilt
2. Partielle Ableitungen. Partielle Ableitungen höherer Ordnungen.
Sei eine Funktion z = f(x, y) in einem Bereich gegeben. Nimm einen beliebigen Punkt M(x, y) und setze das Inkrement Dx auf die Variable x. Dann wird die Größe D x z = f(x + Dx, y) – f(x, y) aufgerufen Teilinkrement der Funktion in x.
Kann geschrieben werden
![]() .
.
Dann angerufen partielle Ableitung Funktionen z = f(x, y) in x.
Bezeichnung: ![]()
Die partielle Ableitung einer Funktion nach y ist ähnlich definiert.
![]()
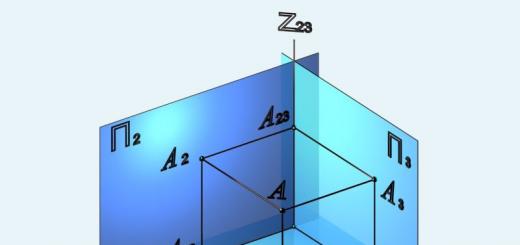
geometrischen Sinn die partielle Ableitung (sagen wir) ist die Tangente der Steigung der Tangente, die am Punkt N 0 (x 0, y 0, z 0) an den Oberflächenabschnitt durch die Ebene y \u003d y 0 gezogen wird.
Wenn die Funktion f(x, y) in einem Bereich D definiert ist, dann werden ihre partiellen Ableitungen und auch in demselben Bereich oder einem Teil davon definiert.
Wir nennen diese Derivate partielle Ableitungen erster Ordnung.
Die Ableitungen dieser Funktionen werden sein partielle Ableitungen zweiter Ordnung.
![]()
![]()
Wenn wir die erhaltenen Gleichheiten weiter differenzieren, erhalten wir partielle Ableitungen höherer Ordnungen.
Partielle Ableitungen der Form ![]() usw. namens gemischte Derivate.
usw. namens gemischte Derivate.
Satz. Wenn die Funktion f(x, y) und ihre partiellen Ableitungen am Punkt M(x, y) und seiner Umgebung definiert und stetig sind, dann gilt die Beziehung:
Jene. partielle Ableitungen höherer Ordnungen hängen nicht von der Reihenfolge der Differentiation ab.
Differentiale höherer Ordnung werden ähnlich definiert.
…………………

Hier ist n die symbolische Potenz der Ableitung, die durch die reale Potenz ersetzt wird, nachdem der eingeklammerte Ausdruck darauf erhoben wurde.
volles Differential. Die geometrische Bedeutung des totalen Differentials. Tangentenebene und Flächennormale.
Der Ausdruck wird aufgerufen volle Steigerung Funktionen f(x, y) an einem Punkt (x, y), wobei a 1 und a 2 infinitesimale Funktionen als Dх ® 0 bzw. Dу ® 0 sind.
volles Differential die Funktion z = f(x, y) ist der lineare Hauptteil in Bezug auf Dx und Dy des Inkrements der Funktion Dz am Punkt (x, y).
Für eine Funktion beliebig vieler Variablen:
Beispiel 3.1. Finden Sie das vollständige Differential der Funktion.
Die geometrische Bedeutung des totalen Differentials einer Funktion zweier Variablen f (x, y) im Punkt (x 0, y 0) ist das Inkrement der Applikate (z-Koordinate) der Tangentialebene an die Oberfläche während des Übergangs vom Punkt (x 0, y 0) zum Punkt (x 0 + Dx, y 0 + Dy).
Partielle Ableitungen höherer Ordnungen. : Wenn die Funktion f(x, y) in einem Bereich D definiert ist, dann werden ihre partiellen Ableitungen und auch in demselben Bereich oder einem Teil davon definiert. Wir nennen diese Ableitungen partielle Ableitungen erster Ordnung.
Die Ableitungen dieser Funktionen sind partielle Ableitungen zweiter Ordnung.
![]() Wenn wir die erhaltenen Gleichheiten weiter differenzieren, erhalten wir partielle Ableitungen höherer Ordnungen. Definition. Partielle Ableitungen der Form
Wenn wir die erhaltenen Gleichheiten weiter differenzieren, erhalten wir partielle Ableitungen höherer Ordnungen. Definition. Partielle Ableitungen der Form ![]() usw. werden als gemischte Derivate bezeichnet. Satz von Schwartz:
usw. werden als gemischte Derivate bezeichnet. Satz von Schwartz:
Wenn partielle Ableitungen höherer Ordnung f.m.s. sind stetige, dann gemischte Ableitungen gleicher Ordnung, die sich nur in der Ordnung der Differentiation = untereinander unterscheiden.
 Hier ist n die symbolische Potenz der Ableitung, die durch die reale Potenz ersetzt wird, nachdem der eingeklammerte Ausdruck darauf erhoben wurde.
Hier ist n die symbolische Potenz der Ableitung, die durch die reale Potenz ersetzt wird, nachdem der eingeklammerte Ausdruck darauf erhoben wurde.
14. Die Gleichung der Tangentialebene und der Normalen zur Oberfläche!
Seien N und N 0 Punkte der gegebenen Fläche. Lassen Sie uns eine gerade Linie NN 0 zeichnen. Die Ebene, die durch den Punkt N 0 geht, wird aufgerufen Tangentialebene zur Oberfläche, wenn der Winkel zwischen der Sekante NN 0 und dieser Ebene gegen Null geht, wenn der Abstand NN 0 gegen Null geht.
Definition. normal zur Oberfläche am Punkt N 0 wird eine gerade Linie genannt, die durch den Punkt N 0 senkrecht zur Tangentialebene an diese Oberfläche verläuft.
Irgendwann hat die Fläche entweder nur noch eine Tangentialebene oder gar keine mehr.
Wenn die Oberfläche durch die Gleichung z \u003d f (x, y) gegeben ist, wobei f (x, y) eine am Punkt M 0 (x 0, y 0) differenzierbare Funktion ist, Tangentialebene am Punkt N 0 (x 0, y 0, (x 0, y 0)) existiert und hat die Gleichung:
Die Gleichung der Normalen zur Oberfläche an diesem Punkt:
![]()
geometrischen Sinn des Gesamtdifferentials einer Funktion zweier Variablen f (x, y) im Punkt (x 0, y 0) ist das Inkrement der Applikate (z-Koordinate) der Tangentialebene an die Oberfläche während des Übergangs vom Punkt (x 0, y 0) zum Punkt (x 0 + Dx, y 0 + Dy).
Wie Sie sehen können, ist die geometrische Bedeutung des totalen Differentials einer Funktion zweier Variablen ein räumliches Analogon der geometrischen Bedeutung des Differentials einer Funktion einer Variablen.
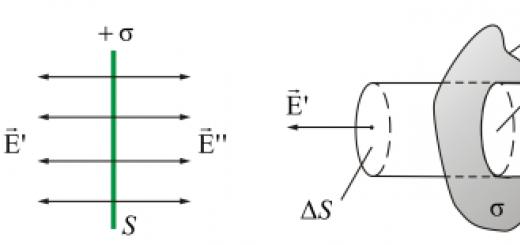
16. Skalarfeld und seine Eigenschaften, Höhenlinien, Richtungsableitungen, Skalarfeldgradient.
Ordnet man jedem Punkt im Raum eine skalare Größe zu, so entsteht ein skalares Feld (z. B. ein Temperaturfeld, ein elektrisches Potentialfeld). Wenn kartesische Koordinaten eingegeben werden, bezeichnen Sie auch oder ![]() Das Feld kann flach sein, wenn es zentral ist
Das Feld kann flach sein, wenn es zentral ist ![]() (kugelförmig) wenn
(kugelförmig) wenn ![]() zylindrisch, wenn
zylindrisch, wenn ![]()
Ebene Flächen und Linien: Die Eigenschaften von Skalarfeldern lassen sich mit Hilfe von Ebene Flächen visualisieren. Das sind Flächen im Raum, auf denen sie einen konstanten Wert annimmt. Ihre Gleichung lautet: ![]() . In einem flachen Skalarfeld sind Niveaulinien Kurven, auf denen das Feld einen konstanten Wert annimmt:
. In einem flachen Skalarfeld sind Niveaulinien Kurven, auf denen das Feld einen konstanten Wert annimmt: ![]() In einigen Fällen können ebene Linien zu Punkten und ebene Oberflächen zu Punkten und Kurven degenerieren.
In einigen Fällen können ebene Linien zu Punkten und ebene Oberflächen zu Punkten und Kurven degenerieren.
Richtungsableitung und Gradient des Skalarfeldes:
Der Einheitsvektor mit Koordinaten sei ein Skalarfeld. Die Richtungsableitung charakterisiert die Änderung des Feldes in einer gegebenen Richtung und berechnet sich nach der Formel Die Richtungsableitung ist das Skalarprodukt eines Vektors und eines Vektors mit Koordinaten  , die als Gradient der Funktion bezeichnet und mit bezeichnet wird
, die als Gradient der Funktion bezeichnet und mit bezeichnet wird  , wobei der Winkel zwischen und , dann zeigt der Vektor die Richtung des schnellsten Feldanstiegs an, und sein Modul ist gleich der Ableitung in dieser Richtung. Da die Komponenten des Gradienten partielle Ableitungen sind, erhält man leicht die folgenden Eigenschaften des Gradienten:
, wobei der Winkel zwischen und , dann zeigt der Vektor die Richtung des schnellsten Feldanstiegs an, und sein Modul ist gleich der Ableitung in dieser Richtung. Da die Komponenten des Gradienten partielle Ableitungen sind, erhält man leicht die folgenden Eigenschaften des Gradienten:
![]()

17. FMP-Extrema Lokales Extremum von fmp, notwendige und hinreichende Bedingungen für seine Existenz. Das größte und kleinste f.m.s. begrenzt geschlossener Bereich.
Die Funktion z = ƒ(x;y) sei in einem Bereich D definiert, dem Punkt N(x0;y0)
Ein Punkt (x0; y0) heißt Maximumpunkt der Funktion z=ƒ(x; y), wenn es eine solche d-Nachbarschaft des Punktes (x0; y0) gibt, dass für jeden Punkt (x; y) außer (xo; yo), erfüllt diese Nachbarschaft die Ungleichung ƒ(х;у)<ƒ(хо;уо). Аналогично определяется точка минимума функции: для всех точек (х; у), отличных от (х0;у0), из d-окрестности точки (хо;уо) выполняется неравенство: ƒ(х;у)>ƒ(х0;y0). Der Wert der Funktion am Punkt des Maximums (Minimum) wird als Maximum (Minimum) der Funktion bezeichnet. Maximum und Minimum einer Funktion werden Extrema genannt. Beachten Sie, dass der Extrempunkt der Funktion aufgrund der Definition innerhalb des Definitionsbereichs der Funktion liegt; Das Maximum und das Minimum haben einen lokalen (lokalen) Charakter: Der Wert der Funktion am Punkt (x0; y0) wird mit seinen Werten an Punkten verglichen, die ausreichend nahe bei (x0; y0) liegen. Im Bereich D kann die Funktion mehrere Extrema oder keine haben.
Notwendige(1) und hinreichende(2) Existenzbedingungen:
(1) Wenn am Punkt N (x0; y0) die differenzierbare Funktion z \u003d ƒ (x; y) ein Extremum hat, sind ihre partiellen Ableitungen an diesem Punkt gleich Null: ƒ "x (x0; y0) \u003d 0, ƒ" y (x0; y0 )=0. Kommentar. Eine Funktion kann an Stellen ein Extremum haben, an denen mindestens eine der partiellen Ableitungen nicht existiert. Der Punkt, an dem die partiellen Ableitungen erster Ordnung der Funktion z ≈ ƒ(x; y) gleich Null sind, also f "x=0, f" y=0, heißt Stationärpunkt der Funktion z.
Stationäre Punkte und Punkte, an denen mindestens eine partielle Ableitung nicht existiert, heißen kritische Punkte.
(2)
Die Funktion ƒ(x; y) habe kontinuierliche partielle Ableitungen bis einschließlich zweiter Ordnung an einem stationären Punkt (xo; yo) und einem Teil seiner Nachbarschaft. Berechnen wir am Punkt (x0;y0) die Werte A=f""xx(x0;y0), B=ƒ""xy(x0;y0), C=ƒ""yy(x0;y0) . Bezeichnen ![]() Dann:
Dann:
1. wenn Δ > 0, dann hat die Funktion ƒ(x; y) im Punkt (x0; y0) ein Extremum: Maximum falls A< 0; минимум, если А > 0;
2. wenn Δ< 0, то функция ƒ(х;у) в точке (х0;у0) экстремума не имеет.
3. Im Fall von Δ = 0 kann es am Punkt (x0; y0) ein Extremum geben oder nicht. Weitere Forschung ist erforderlich.
Tangentenebene und Flächennormale.
Tangentialebene
Seien N und N 0 Punkte der gegebenen Fläche. Lassen Sie uns eine gerade Linie NN 0 zeichnen. Die Ebene, die durch den Punkt N 0 geht, wird aufgerufen Tangentialebene zur Oberfläche, wenn der Winkel zwischen der Sekante NN 0 und dieser Ebene gegen Null geht, wenn der Abstand NN 0 gegen Null geht.
Definition. normal zur Oberfläche am Punkt N 0 wird eine gerade Linie genannt, die durch den Punkt N 0 senkrecht zur Tangentialebene an diese Oberfläche verläuft.
Irgendwann hat die Fläche entweder nur noch eine Tangentialebene oder gar keine mehr.
Wenn die Oberfläche durch die Gleichung z \u003d f (x, y) gegeben ist, wobei f (x, y) eine am Punkt M 0 (x 0, y 0) differenzierbare Funktion ist, ist die Tangentialebene am Punkt N 0 (x 0, y 0, ( x 0 ,y 0)) existiert und hat die Gleichung:
Die Gleichung für die Normale zur Oberfläche an diesem Punkt lautet:
![]()
geometrischen Sinn des Gesamtdifferentials einer Funktion zweier Variablen f (x, y) im Punkt (x 0, y 0) ist das Inkrement der Applikate (z-Koordinate) der Tangentialebene an die Oberfläche während des Übergangs vom Punkt (x 0, y 0) zum Punkt (x 0 +x , y 0 +y).
Wie Sie sehen können, ist die geometrische Bedeutung des totalen Differentials einer Funktion zweier Variablen ein räumliches Analogon der geometrischen Bedeutung des Differentials einer Funktion einer Variablen.
Beispiel. Finden Sie die Gleichungen der Tangentialebene und der Normalen zur Oberfläche
am Punkt M(1, 1, 1).
![]()
Tangentenebenengleichung:
Normale Gleichung:
20.4. Ungefähre Berechnungen unter Verwendung des Gesamtdifferentials.
Die Funktion f(x, y) sei an der Stelle (x, y) differenzierbar. Finden wir das Gesamtinkrement dieser Funktion:
Setzen wir in diese Formel den Ausdruck ein
dann erhalten wir die Näherungsformel:
Beispiel. Berechnen Sie ungefähr den Wert von , basierend auf dem Wert der Funktion bei x = 1, y = 2, z = 1.
Aus dem gegebenen Ausdruck bestimmen wir x = 1,04 - 1 = 0,04, y = 1,99 - 2 = -0,01,
z \u003d 1,02 - 1 \u003d 0,02.
Finde den Wert der Funktion u(x, y, z) =
Wir finden partielle Ableitungen:
![]()
Das totale Differential der Funktion u ist:
Der genaue Wert dieses Ausdrucks ist 1,049275225687319176.
20.5. Partielle Ableitungen höherer Ordnungen.
Wenn die Funktion f(x, y) in einem Bereich D definiert ist, werden ihre partiellen Ableitungen ebenfalls in demselben Bereich oder einem Teil davon definiert.
Wir nennen diese Derivate partielle Ableitungen erster Ordnung.
Die Ableitungen dieser Funktionen werden sein partielle Ableitungen zweiter Ordnung.
![]()
![]()
Wenn wir die erhaltenen Gleichheiten weiter differenzieren, erhalten wir partielle Ableitungen höherer Ordnungen.
Definition.
Partielle Ableitungen der Form ![]() usw. namens gemischte Derivate.
usw. namens gemischte Derivate.
Satz. Wenn die Funktion f(x, y) und ihre partiellen Ableitungen am Punkt M(x, y) und seiner Umgebung definiert und stetig sind, dann gilt die Beziehung:
Jene. partielle Ableitungen höherer Ordnungen hängen nicht von der Reihenfolge der Differentiation ab.
Differentiale höherer Ordnung werden ähnlich definiert.
…………………
![]()
Hier ist n die symbolische Potenz der Ableitung, die durch die reale Potenz ersetzt wird, nachdem der eingeklammerte Ausdruck darauf erhoben wurde.
Für eine Funktion einer Variablen j = f(x) am Punkt x 0 Die geometrische Bedeutung des Differentials bedeutet das Inkrement der Ordinate der Tangente, die an den Graphen der Funktion am Punkt mit der Abszisse gezogen wird x 0 beim Bewegen zu einem Punkt x 0 + x. Und das Differential einer Funktion zweier Variablen ist in dieser Hinsicht ein Inkrement Applikationen Tangente Flugzeug auf die durch die Gleichung gegebene Oberfläche gezogen z = f(x, j) , am Punkt M 0 (x 0 , j 0 ) beim Bewegen zu einem Punkt M(x 0 + x, j 0 + j). Wir geben die Definition einer Tangentialebene an eine Oberfläche:
Df . Ebene, die durch einen Punkt geht R 0 Oberflächen S, wird genannt Tangentialebene an einem gegebenen Punkt, wenn der Winkel zwischen dieser Ebene und einer Sekante durch zwei Punkte geht R 0 und R(Jeder Punkt auf der Oberfläche S) , tendiert gegen Null, wenn der Punkt R tendiert entlang dieser Fläche zu einem Punkt R 0 .
Lassen Sie die Oberfläche S durch die Gleichung gegeben z = f(x, j). Dann kann gezeigt werden, dass diese Fläche einen Punkt hat P 0 (x 0 , j 0 , z 0 ) Tangentenebene genau dann, wenn die Funktion z = f(x, j) ist an dieser Stelle differenzierbar. In diesem Fall ist die Tangentialebene durch die Gleichung gegeben:
z –
z 0
=
+
 (6).
(6).
§5. Richtungsableitung, Funktionsgradient.
Partielle Ableitungsfunktionen j=
f(x 1
,
x 2
..
x n )
durch Variablen x 1
,
x 2
. . .
x n drückt die Änderungsrate der Funktion in Richtung der Koordinatenachsen aus. Zum Beispiel,  ist die Änderungsrate der Funktion X 1
- das heißt, es wird angenommen, dass sich der zum Definitionsbereich der Funktion gehörende Punkt nur parallel zur Achse bewegt OH 1
, und alle anderen Koordinaten bleiben unverändert. Es ist jedoch davon auszugehen, dass sich die Funktion auch in eine andere Richtung ändern kann, die mit der Richtung keiner der Achsen zusammenfällt.
ist die Änderungsrate der Funktion X 1
- das heißt, es wird angenommen, dass sich der zum Definitionsbereich der Funktion gehörende Punkt nur parallel zur Achse bewegt OH 1
, und alle anderen Koordinaten bleiben unverändert. Es ist jedoch davon auszugehen, dass sich die Funktion auch in eine andere Richtung ändern kann, die mit der Richtung keiner der Achsen zusammenfällt.
Betrachten Sie eine Funktion von drei Variablen: u= f(x, j, z).
Fixieren Sie einen Punkt M 0 (x 0 , j 0 , z 0 ) und eine gerichtete Gerade (Achse) l diesen Punkt passieren. Lassen M(x, j, z) - ein beliebiger Punkt dieser Linie und M 0 M - Entfernung von M 0 Vor M.
u = f (x, j, z) – f(x 0 , j 0 , z 0 ) – Funktionsinkrement an einem Punkt M 0 .
Finden Sie das Verhältnis des Inkrements der Funktion zur Länge des Vektors  :
:
Df . Ableitungsfunktion u = f (x, j, z) gegenüber l am Punkt M 0 heißt der Grenzwert des Verhältnisses des Inkrements der Funktion zur Länge des Vektors M 0 Mwenn letztere gegen 0 strebt (oder, was dasselbe ist, mit unbegrenzter Annäherung M zu M 0 ):
 (1)
(1)
Diese Ableitung charakterisiert die Änderungsgeschwindigkeit der Funktion an dem Punkt M 0 in die Richtung l.
Lassen Sie die Achse l
(Vektor M 0
M)
Formen mit Achsen OCHSE,
OY,
oz Ecken  bzw.
bzw.
Bezeichne x-x 0 =  ;
;
y - y 0 =  ;
;
z - z 0 =  .
.
Dann der Vektor M 0
M = (x
-
x 0
,
j
-
j 0
,
z
-
z 0
)=
 und seine Richtungskosinus:
und seine Richtungskosinus:
 ;
;
 ;
;
 .
.
 (4).
(4).
(4) ist eine Formel zur Berechnung der Richtungsableitung.
Betrachten Sie einen Vektor, dessen Koordinaten die partiellen Ableitungen der Funktion sind u= f(x, j, z) am Punkt M 0 :

Grad u - Funktionsgradient u= f(x, j, z) am Punkt M(x, j, z)
Verlaufseigenschaften:

Fazit: Länge des Funktionsgradienten u=
f(x,
j,
z)
- ist der höchstmögliche Wert 
 An diesem Punkt M(x,
j,
z)
, und die Richtung des Vektors Grad
u mit der Richtung des aus dem Punkt kommenden Vektors übereinstimmt M, entlang der sich die Funktion am schnellsten ändert. Das heißt, die Richtung des Funktionsgradienten
Grad
u
ist die Richtung des schnellsten Anstiegs der Funktion.
An diesem Punkt M(x,
j,
z)
, und die Richtung des Vektors Grad
u mit der Richtung des aus dem Punkt kommenden Vektors übereinstimmt M, entlang der sich die Funktion am schnellsten ändert. Das heißt, die Richtung des Funktionsgradienten
Grad
u
ist die Richtung des schnellsten Anstiegs der Funktion.
$E \subset \mathbb(R)^(n)$. Es wird gesagt, dass $f$ hat lokales Maximum am Punkt $x_(0) \in E$ wenn es eine Umgebung $U$ des Punktes $x_(0)$ gibt, so dass für alle $x \in U$ die Ungleichung $f\left(x\right) \leqslant f \left(x_(0)\right)$.
Das lokale Maximum wird aufgerufen strikt , wenn die Nachbarschaft $U$ so gewählt werden kann, dass für alle von $x_(0)$ verschiedenen $x \in U$ $f\left(x\right)< f\left(x_{0}\right)$.
Definition
Sei $f$ eine reelle Funktion auf einer offenen Menge $E \subset \mathbb(R)^(n)$. Es wird gesagt, dass $f$ hat lokales Minimum am Punkt $x_(0) \in E$ wenn es eine Umgebung $U$ des Punktes $x_(0)$ gibt, so dass für alle $x \in U$ die Ungleichung $f\left(x\right) \geqslant f \left(x_(0)\right)$.
Ein lokales Minimum heißt streng, wenn die Nachbarschaft $U$ so gewählt werden kann, dass für alle $x \in U$ verschieden von $x_(0)$ $f\left(x\right) > f\left(x_ ( 0)\richtig)$.
Ein lokales Extremum kombiniert die Konzepte eines lokalen Minimums und eines lokalen Maximums.
Satz (notwendige Bedingung für Extremum einer differenzierbaren Funktion)
Sei $f$ eine reelle Funktion auf einer offenen Menge $E \subset \mathbb(R)^(n)$. Wenn an der Stelle $x_(0) \in E$ die Funktion $f$ auch an dieser Stelle ein lokales Extremum hat, dann ist $$\text(d)f\left(x_(0)\right)=0. $$ Das Gleichheits-Null-Differential ist gleichbedeutend mit der Tatsache, dass alle gleich Null sind, d.h. $$\displaystyle\frac(\partial f)(\partial x_(i))\left(x_(0)\right)=0.$$
Im eindimensionalen Fall ist dies . Es sei $\phi \left(t\right) = f \left(x_(0)+th\right)$, wobei $h$ ein beliebiger Vektor ist. Für hinreichend kleine Modulo-Werte von $t$ ist die Funktion $\phi$ definiert. Außerdem ist sie bezüglich differenzierbar und $(\phi)’ \left(t\right) = \text(d)f \left(x_(0)+th\right)h$.
$f$ habe ein lokales Maximum bei x $0$. Daher hat die Funktion $\phi$ bei $t = 0$ ein lokales Maximum und nach dem Satz von Fermat ist $(\phi)' \left(0\right)=0$.
Wir haben also $df \left(x_(0)\right) = 0$, d.h. Die Funktion $f$ am Punkt $x_(0)$ ist auf jedem Vektor $h$ gleich Null.
Definition
Die Punkte, an denen das Differential gleich Null ist, d.h. solche, bei denen alle partiellen Ableitungen gleich Null sind, heißen stationär. kritische Punkte Funktionen $f$ sind jene Punkte, an denen $f$ nicht differenzierbar oder gleich Null ist. Wenn der Punkt stationär ist, folgt daraus noch nicht, dass die Funktion an diesem Punkt ein Extremum hat.
Beispiel 1
Sei $f \left(x,y\right)=x^(3)+y^(3)$. Dann $\displaystyle\frac(\partial f)(\partial x) = 3 \cdot x^(2)$,$\displaystyle\frac(\partial f)(\partial y) = 3 \cdot y^(2 )$, also ist $\left(0,0\right)$ ein stationärer Punkt, aber die Funktion hat an diesem Punkt kein Extremum. Tatsächlich ist $f \left(0,0\right) = 0$, aber es ist leicht zu erkennen, dass die Funktion in jeder Umgebung des Punktes $\left(0,0\right)$ sowohl positive als auch negative Werte annimmt.
Beispiel 2
Die Funktion $f \left(x,y\right) = x^(2) − y^(2)$ hat den Koordinatenursprung als stationären Punkt, aber es ist klar, dass es an diesem Punkt kein Extremum gibt.
Satz (hinreichende Bedingung für ein Extremum).
Eine Funktion $f$ sei auf einer offenen Menge $E \subset \mathbb(R)^(n)$ zweimal stetig differenzierbar. Sei $x_(0) \in E$ ein stationärer Punkt und $$\displaystyle Q_(x_(0)) \left(h\right) \equiv \sum_(i=1)^n \sum_(j=1 ) ^n \frac(\partial^(2) f)(\partial x_(i) \partial x_(j)) \left(x_(0)\right)h^(i)h^(j).$ $ Dann
- wenn $Q_(x_(0))$ – , dann hat die Funktion $f$ am Punkt $x_(0)$ ein lokales Extremum, nämlich das Minimum, wenn die Form positiv definit ist, und das Maximum, wenn die Form es ist negativ-definit;
- wenn die quadratische Form $Q_(x_(0))$ unbestimmt ist, dann hat die Funktion $f$ an der Stelle $x_(0)$ kein Extremum.
Verwenden wir die Entwicklung nach der Taylor-Formel (12.7 S. 292) . Unter Berücksichtigung, dass die partiellen Ableitungen erster Ordnung am Punkt $x_(0)$ gleich Null sind, erhalten wir $$\displaystyle f \left(x_(0)+h\right)−f \left(x_(0 )\right) = \ frac(1)(2) \sum_(i=1)^n \sum_(j=1)^n \frac(\partial^(2) f)(\partial x_(i) \ teilweise x_(j)) \left(x_(0)+\theta h\right)h^(i)h^(j),$$ wobei $0<\theta<1$. Обозначим $\displaystyle a_{ij}=\frac{\partial^{2} f}{\partial x_{i} \partial x_{j}} \left(x_{0}\right)$. В силу теоремы Шварца (12.6 стр. 289-290) , $a_{ij}=a_{ji}$. Обозначим $$\displaystyle \alpha_{ij} \left(h\right)=\frac{\partial^{2} f}{\partial x_{i} \partial x_{j}} \left(x_{0}+\theta h\right)−\frac{\partial^{2} f}{\partial x_{i} \partial x_{j}} \left(x_{0}\right).$$ По предположению, все непрерывны и поэтому $$\lim_{h \rightarrow 0} \alpha_{ij} \left(h\right)=0. \left(1\right)$$ Получаем $$\displaystyle f \left(x_{0}+h\right)−f \left(x_{0}\right)=\frac{1}{2}\left.$$ Обозначим $$\displaystyle \epsilon \left(h\right)=\frac{1}{|h|^{2}}\sum_{i=1}^n \sum_{j=1}^n \alpha_{ij} \left(h\right)h_{i}h_{j}.$$ Тогда $$|\epsilon \left(h\right)| \leq \sum_{i=1}^n \sum_{j=1}^n |\alpha_{ij} \left(h\right)|$$ и, в силу соотношения $\left(1\right)$, имеем $\epsilon \left(h\right) \rightarrow 0$ при $h \rightarrow 0$. Окончательно получаем $$\displaystyle f \left(x_{0}+h\right)−f \left(x_{0}\right)=\frac{1}{2}\left. \left(2\right)$$ Предположим, что $Q_{x_{0}}$ – положительноопределенная форма. Согласно лемме о положительноопределённой квадратичной форме (12.8.1 стр. 295, Лемма 1) , существует такое положительное число $\lambda$, что $Q_{x_{0}} \left(h\right) \geqslant \lambda|h|^{2}$ при любом $h$. Поэтому $$\displaystyle f \left(x_{0}+h\right)−f \left(x_{0}\right) \geq \frac{1}{2}|h|^{2} \left(λ+\epsilon \left(h\right)\right).$$ Так как $\lambda>0$, und $\epsilon \left(h\right) \rightarrow 0$ für $h \rightarrow 0$, dann ist die rechte Seite positiv für jeden Vektor $h$ hinreichend kleiner Länge.
Wir sind also zu dem Schluss gekommen, dass in irgendeiner Umgebung des Punktes $x_(0)$ die Ungleichung $f \left(x\right) >f \left(x_(0)\right)$ erfüllt ist, wenn nur $ x \neq x_ (0)$ (wir setzen $x=x_(0)+h$\right). Das bedeutet, dass die Funktion an der Stelle $x_(0)$ ein striktes lokales Minimum hat, und damit ist der erste Teil unseres Theorems bewiesen.
Nehmen wir nun an, dass $Q_(x_(0))$ eine unbestimmte Form ist. Dann gibt es Vektoren $h_(1)$, $h_(2)$ so dass $Q_(x_(0)) \left(h_(1)\right)=\lambda_(1)>0$, $Q_ ( x_(0)) \left(h_(2)\right)= \lambda_(2)<0$. В соотношении $\left(2\right)$ $h=th_{1}$ $t>0$. Dann erhalten wir $$f \left(x_(0)+th_(1)\right)−f \left(x_(0)\right) = \frac(1)(2) \left[ t^(2) \ lambda_(1) + t^(2) |h_(1)|^(2) \epsilon \left(th_(1)\right) \right] = \frac(1)(2) t^(2) \ left[ \lambda_(1) + |h_(1)|^(2) \epsilon \left(th_(1)\right) \right].$$ Für hinreichend kleine $t>0$ ist die rechte Seite positiv. Das bedeutet, dass in jeder Umgebung des Punktes $x_(0)$ die Funktion $f$ Werte $f \left(x\right)$ größer als $f \left(x_(0)\right)$ annimmt.
In ähnlicher Weise erhalten wir, dass in jeder Umgebung des Punktes $x_(0)$ die Funktion $f$ Werte kleiner als $f \left(x_(0)\right)$ annimmt. Zusammen mit dem vorigen bedeutet dies, dass die Funktion $f$ an der Stelle $x_(0)$ kein Extremum hat.
Betrachten wir einen Spezialfall dieses Satzes für eine Funktion $f \left(x,y\right)$ von zwei Variablen, die in irgendeiner Umgebung des Punktes $\left(x_(0),y_(0)\right) definiert sind. $ und mit stetigen partiellen Ableitungen erster und zweiter Ordnung. Sei $\left(x_(0),y_(0)\right)$ ein stationärer Punkt und $$\displaystyle a_(11)= \frac(\partial^(2) f)(\partial x ^( 2)) \left(x_(0) ,y_(0)\right), a_(12)=\frac(\partial^(2) f)(\partial x \partial y) \left(x_( 0) , y_(0)\right), a_(22)=\frac(\partial^(2) f)(\partial y^(2)) \left(x_(0), y_(0)\right ). $$ Dann nimmt der vorherige Satz die folgende Form an.
Satz
Sei $\Delta=a_(11) \cdot a_(22) − a_(12)^2$. Dann:
- wenn $\Delta>0$, dann hat die Funktion $f$ an der Stelle $\left(x_(0),y_(0)\right)$ ein lokales Extremum, nämlich ein Minimum, wenn $a_(11)> 0$ , und maximal wenn $a_(11)<0$;
- wenn $\Delta<0$, то экстремума в точке $\left(x_{0},y_{0}\right)$ нет. Как и в одномерном случае, при $\Delta=0$ экстремум может быть, а может и не быть.
Beispiele für Problemlösungen
Algorithmus zum Finden des Extremums einer Funktion vieler Variablen:
- Wir finden stationäre Punkte;
- An allen stationären Punkten finden wir das Differential 2. Ordnung
- Unter Verwendung der hinreichenden Bedingung für das Extremum einer Funktion mehrerer Variablen betrachten wir das Differential zweiter Ordnung an jedem stationären Punkt
- Untersuchen Sie die Funktion zum Extremum $f \left(x,y\right) = x^(3) + 8 \cdot y^(3) + 18 \cdot x — 30 \cdot y$.
EntscheidungFinde partielle Ableitungen 1. Ordnung: $$\displaystyle \frac(\partial f)(\partial x)=3 \cdot x^(2) — 6 \cdot y;$$ $$\displaystyle \frac(\partial f)(\partial y)=24 \cdot y^(2) — 6 \cdot x.$$ Bilden und lösen Sie das System: $$\displaystyle \begin(cases)\frac(\partial f)(\partial x ) = 0\\\frac(\partial f)(\partial y)= 0\end(cases) \Rightarrow \begin(cases)3 \cdot x^(2) - 6 \cdot y= 0\\24 \ cdot y^(2) - 6 \cdot x = 0\end(cases) \Rightarrow \begin(cases)x^(2) - 2 \cdot y= 0\\4 \cdot y^(2) - x = 0 \end(cases)$$ Aus der 2. Gleichung drücken wir $x=4 \cdot y^(2)$ aus — ersetzen Sie in die 1. Gleichung: $$\displaystyle \left(4 \cdot y^(2)\ rechts )^(2)-2 \cdot y=0$$ $$16 \cdot y^(4) — 2 \cdot y = 0$$ $$8 \cdot y^(4) — y = 0$$ $$ y \left(8 \cdot y^(3) -1\right)=0$$ Als Ergebnis erhält man 2 stationäre Punkte:
1) $y=0 \Rightarrow x = 0, M_(1) = \left(0, 0\right)$;
2) $\displaystyle 8 \cdot y^(3) -1=0 \Rightarrow y^(3)=\frac(1)(8) \Rightarrow y = \frac(1)(2) \Rightarrow x=1 , M_(2) = \left(\frac(1)(2), 1\right)$
Prüfen wir die Erfüllung der hinreichenden Extremumsbedingung:
$$\displaystyle \frac(\partial^(2) f)(\partial x^(2))=6 \cdot x; \frac(\partial^(2) f)(\partial x \partial y)=-6; \frac(\partial^(2) f)(\partial y^(2))=48 \cdot y$$
1) Für Punkt $M_(1)= \left(0,0\right)$:
$$\displaystyle A_(1)=\frac(\partial^(2) f)(\partial x^(2)) \left(0,0\right)=0; B_(1)=\frac(\partial^(2) f)(\partial x \partial y) \left(0,0\right)=-6; C_(1)=\frac(\partial^(2) f)(\partial y^(2)) \left(0,0\right)=0;$$
$A_(1) \cdot B_(1) - C_(1)^(2) = -36<0$ , значит, в точке $M_{1}$ нет экстремума.
2) Für Punkt $M_(2)$:
$$\displaystyle A_(2)=\frac(\partial^(2) f)(\partial x^(2)) \left(1,\frac(1)(2)\right)=6; B_(2)=\frac(\partial^(2) f)(\partial x \partial y) \left(1,\frac(1)(2)\right)=-6; C_(2)=\frac(\partial^(2) f)(\partial y^(2)) \left(1,\frac(1)(2)\right)=24;$$
$A_(2) \cdot B_(2) — C_(2)^(2) = 108>0$, also gibt es ein Extremum am Punkt $M_(2)$, und da $A_(2)>0 $, dann ist dies das Minimum.
Antwort: Der Punkt $\displaystyle M_(2) \left(1,\frac(1)(2)\right)$ ist der Minimalpunkt der Funktion $f$. - Untersuchen Sie die Funktion für das Extremum $f=y^(2) + 2 \cdot x \cdot y - 4 \cdot x - 2 \cdot y - 3$.
EntscheidungFinde stationäre Punkte: $$\displaystyle \frac(\partial f)(\partial x)=2 \cdot y - 4;$$ $$\displaystyle \frac(\partial f)(\partial y)=2 \cdot y + 2 \cdot x — 2.$$
Bilde und löse das System: $$\displaystyle \begin(cases)\frac(\partial f)(\partial x)= 0\\\frac(\partial f)(\partial y)= 0\end(cases) \ Rightarrow \begin(cases)2 \cdot y - 4= 0\\2 \cdot y + 2 \cdot x - 2 = 0\end(cases) \Rightarrow \begin(cases) y = 2\\y + x = 1\end(cases) \Rightarrow x = -1$$
$M_(0) \left(-1, 2\right)$ ist ein stationärer Punkt.
Prüfen wir die Erfüllung der hinreichenden Extremumsbedingung: $$\displaystyle A=\frac(\partial^(2) f)(\partial x^(2)) \left(-1,2\right)=0; B=\frac(\partial^(2) f)(\partial x \partial y) \left(-1,2\right)=2; C=\frac(\partial^(2) f)(\partial y^(2)) \left(-1,2\right)=2;$$
$A \cdot B - C^(2) = -4<0$ , значит, в точке $M_{0}$ нет экстремума.
Antwort: Es gibt keine Extrema.
Zeitlimit: 0
Navigation (nur Stellennummern)
0 von 4 Aufgaben abgeschlossen
Information
Nehmen Sie an diesem Quiz teil, um Ihr Wissen über das gerade gelesene Thema Lokale Extrema von Funktionen vieler Variablen zu testen.
Sie haben den Test schon einmal gemacht. Sie können es nicht erneut ausführen.
Test wird geladen...
Sie müssen sich anmelden oder registrieren, um den Test zu starten.
Sie müssen die folgenden Tests absolvieren, um diesen zu starten:
Ergebnisse
Richtige Antworten: 0 von 4
Deine Zeit:
Die Zeit ist um
Sie haben 0 von 0 Punkten erzielt (0 )
Ihre Punktzahl wurde in der Rangliste aufgezeichnet
- Mit einer Antwort
- Geprüft
Aufgabe 2 von 4
2 .
Punktzahl: 1Funktioniert die Funktion $f = 4 + \sqrt((x^(2)+y^(2))^(2))$
Korrekt
Aufgabe 1 von 4
1 .
Punktzahl: 1Untersuchen Sie die Funktion $f$ auf Extrema: $f=e^(x+y)(x^(2)-2 \cdot y^(2))$
Korrekt
Nicht in Ordnung