wo r ist der Radiusvektor, der von Punkt O zu Punkt A, dem Ort des Materialpunkts, gezogen wird, p=m v ist der Impuls des materiellen Punktes. Impulsvektormodul:
wobei a der Winkel zwischen den Vektoren ist r und p, l ist die Schulter des Vektors p in Bezug auf den Punkt O. Der Vektor L das Kreuzprodukt steht definitionsgemäß senkrecht auf der Ebene, in der die Vektoren liegen r und p(oder v), ihre Richtung fällt mit der Richtung der Translationsbewegung der rechten Schraube zusammen, wenn sie sich dreht r zu p
Winkelmoment um die Achse wird eine skalare Größe genannt, die gleich der Projektion des Drehimpulsvektors auf diese Achse ist, der relativ zu einem beliebigen Punkt auf dieser Achse definiert ist.
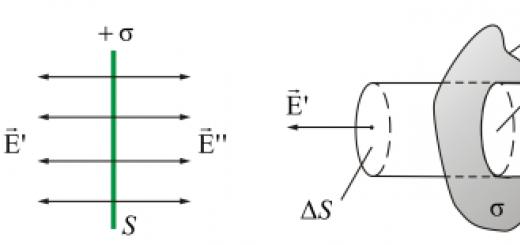
Das Kraftmoment M eines materiellen Punktes relativ zum Punkt O heißt eine Vektorgröße, die durch das Vektorprodukt des Radiusvektors r, der vom Punkt O zum Angriffspunkt der Kraft gezogen wird, durch die Kraft bestimmt wird F: .
 |
| Abb.2. |
Moment des Kraftvektormoduls:
wobei a der Winkel zwischen den Vektoren ist r und F, d \u003d r * sina - die Schulter der Kraft - der kürzeste Abstand zwischen der Wirkungslinie der Kraft und dem Punkt O. Vektor M(ebenso gut wie L) - senkrecht zu der Ebene, in der die Vektoren liegen r und F, ihre Richtung fällt mit der Richtung der Translationsbewegung der rechten Schraube zusammen, wenn sie sich dreht r zu F die kürzeste Distanz, wie in der Abbildung gezeigt.
Kraftmoment um die Achse eine skalare Größe genannt, die der Projektion des Vektors des Kraftmoments auf diese Achse entspricht M in Bezug auf einen beliebigen Punkt auf dieser Achse definiert.
Das Grundgesetz der Dynamik der Rotationsbewegung
Um den Zweck der obigen Konzepte zu verdeutlichen, betrachten wir ein System aus zwei materiellen Punkten (Partikeln) und verallgemeinern dann das Ergebnis auf ein System aus einer beliebigen Anzahl von Partikeln (dh auf einen starren Körper). Angenommen Teilchen mit Massen m 1 , m 2 , deren Impulse p1 und p2, wirken äußere Kräfte F1 und F2. Teilchen interagieren auch untereinander durch innere Kräfte f 12 und f 21 .
 |
| Abb. 3. |
Schreiben wir für jedes der Teilchen das zweite Newtonsche Gesetz auf, sowie den Zusammenhang zwischen den inneren Kräften, die sich aus dem dritten Newtonschen Gesetz ergeben:
Multipliziere die Vektorgleichung (1) mit r1, und Gleichung (2) – an r2 und fügen Sie die resultierenden Ausdrücke hinzu:
Lassen Sie uns die linken Teile von Gleichung (4) umwandeln, wobei wir dies berücksichtigen
 .
.
Die Vektoren und sind parallel und ihr Kreuzprodukt ist Null, also können wir schreiben
 . (5)
. (5)
Die ersten beiden Terme rechts in (4) sind gleich Null, d.h.
soweit f 21 = -f 12, und der Vektor r1-r2 entlang der gleichen geraden Linie wie der Vektor gerichtet f 12.
Unter Berücksichtigung von (5) und (6) aus (4) erhalten wir
![]() oder
oder
wo L = L 1 + L 2; M=M1+M2. Wenn wir das Ergebnis auf ein System von n Teilchen verallgemeinern, können wir schreiben L=L 1 +L 2 +…+L n = M = M 1 + M 2 + M n=
Gleichung (7) ist eine mathematische Aufzeichnung des Grundgesetzes der Dynamik der Rotationsbewegung: Die Änderungsrate des Drehimpulses des Systems ist gleich der Summe der Momente der darauf wirkenden äußeren Kräfte. Dieses Gesetz gilt für jeden festen oder mit konstanter Geschwindigkeit bewegten Punkt in einem Inertialbezugssystem. Daraus folgt das Gesetz Erhaltung des Drehimpulses: wenn das Moment der äußeren Kräfte M gleich Null ist, dann bleibt der Drehimpuls des Systems erhalten (L= konstant).
Der Drehimpuls eines vollkommen starren Körpers um eine feste Achse.
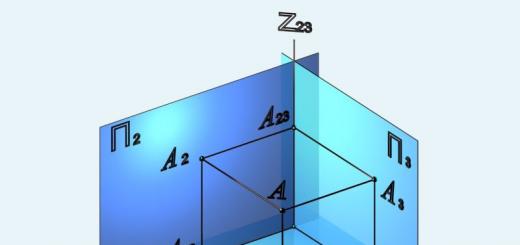
Betrachten Sie die Rotation eines absolut starren Körpers um eine feste Achse z. Ein Festkörper kann als System von n materiellen Punkten (Teilchen) dargestellt werden. Während der Drehung bewegt sich ein betrachteter Punkt des Körpers (wir bezeichnen ihn mit dem Index i und i=1…n) entlang eines Kreises mit konstantem Radius R i mit einer linearen Geschwindigkeit v i um die z-Achse (Abb. 4). Ihre Geschwindigkeit v ich und Impuls m i v ich senkrecht zum Radius R ich. Daher ist der Modul des Drehimpulses eines Teilchens eines Körpers relativ zum Punkt O, der sich auf der Rotationsachse befindet:
wobei r i der Radiusvektor ist, der vom Punkt О zum Partikel gezogen wird.
Aus dem Zusammenhang zwischen Linear- und Winkelgeschwindigkeit v i = wR i , wobei R i der Abstand des Teilchens von der Rotationsachse ist, erhält man
Die Projektion dieses Vektors auf die Rotationsachse z, d.h. Der Drehimpuls eines Körperteilchens relativ zur z-Achse ist gleich:
Der Drehimpuls eines starren Körpers um die Achse ist die Summe der Drehimpulse aller Körperteile:
![]()
Der Wert von I z, gleich der Summe der Produkte der Massen der Teilchen des Körpers und der Quadrate ihrer Abstände zur z-Achse, wird als Trägheitsmoment des Körpers um diese Achse bezeichnet:
Aus Ausdruck (8) folgt, dass der Drehimpuls des Körpers nicht von der Position des Punktes O auf der Rotationsachse abhängt, daher sprechen wir vom Drehimpuls des Körpers relativ zu einer Rotationsachse und nicht relativ zum Punkt
Es besteht eine Ähnlichkeit zwischen den Formulierungen des Grundgesetzes der Rotationsbewegung, den Definitionen des Moments des Impulses und der Kraft mit den Formulierungen des zweiten Newtonschen Gesetzes und den Definitionen des Impulses für die Translationsbewegung.
Freie Achsen und Hauptträgheitsachsen des Körpers
Um eine feste Position der Rotationsachse eines starren Körpers im Raum beizubehalten, wird dieser mechanisch fixiert, üblicherweise unter Verwendung von Lagern, d. h. von äußeren Kräften beeinflusst. Es gibt jedoch solche Rotationsachsen von Körpern, die ihre Orientierung im Raum nicht ändern, ohne dass äußere Kräfte auf sie einwirken. Diese Achsen werden aufgerufen frei Achsen. Es kann bewiesen werden, dass jeder Körper drei zueinander senkrechte Achsen hat, die durch seinen Massenmittelpunkt verlaufen und frei sind. Diese Achsen werden auch genannt Hauptträgheitsachsen des Körpers.
Gyroskope
Gyroskope werden derzeit als eine sehr breite Klasse von Geräten bezeichnet, die mehr als hundert verschiedene Phänomene und physikalische Prinzipien nutzen. In dieser Laborarbeit wird ein klassischer Kreisel untersucht, in Zukunft nur noch ein Kreisel.
Ein Kreisel (oder Kreisel) ist ein massiver symmetrischer Körper, der sich mit hoher Winkelgeschwindigkeit um seine Symmetrieachse dreht. Wir nennen diese Achse die Achse des Kreisels. Die Kreiselachse ist eine der Hauptträgheitsachsen (freie Achse). Der Drehimpuls des Kreisels ist in diesem Fall entlang der Achse gerichtet und gleich L= Ich w.
Stellen Sie sich ein horizontal ausbalanciertes Gyroskop vor (dessen Schwerpunkt über dem Drehpunkt liegt). Da das Gravitationsmoment dafür gleich Null ist, gilt dann nach dem Gesetz der Erhaltung des Drehimpulses L= Ich w= const, d. h. die Richtung seiner Rotationsachse ändert seine Position im Raum nicht.
Beim Versuch, die Kreiselachse zum Rotieren zu bringen, wird ein sogenanntes Phänomen beobachtet Kreiseleffekt. Das Wesentliche des Effekts: Unter der Wirkung einer Kraft F, die auf die Achse eines rotierenden Gyroskops ausgeübt wird, dreht sich die Achse des Gyroskops in einer Ebene senkrecht zu dieser Kraft. Beispielsweise dreht sich die Achse des Kreisels unter Einwirkung einer vertikalen Kraft in der horizontalen Ebene. Auf den ersten Blick erscheint dies kontraintuitiv.
Der Kreiseleffekt wird wie folgt erklärt (Abb. 5). Moment M Stärke F senkrecht zu seiner Achse gerichtet, weil M=, r ist der Radiusvektor vom Schwerpunkt des Kreisels zum Kraftangriffspunkt.
 |
| Abb.5. |
Während der Zeit dt der Drehimpuls des Kreisels L erhält eine Erhöhung d L=M*dt (gemäß dem Grundgesetz der Rotationsbewegung) und in die gleiche Richtung gerichtet wie M und gleich werden L+d L. Richtung L+d L mit der neuen Richtung der Drehachse des Kreisels zusammenfällt. Somit dreht sich die Achse des Gyroskops in einer Ebene senkrecht zur Kraft F bei einem Winkel dφ=|dL|/L=M*dt/L, mit Winkelgeschwindigkeit
Die Rotationswinkelgeschwindigkeit der Gyroskopachse W wird Präzessionswinkelgeschwindigkeit genannt, und eine solche Rotationsbewegung der Gyroskopachse Präzession.
Aus (9) folgt
Vektoren M, L, W zueinander senkrecht, damit wir schreiben können
M=.
Diese Formel wird erhalten, wenn die Vektoren M, L, W stehen senkrecht zueinander, aber es kann bewiesen werden, dass es im allgemeinen Fall gilt.
Beachten Sie, dass diese Argumente und die Ableitung von Formeln in dem Fall gültig sind, in dem die Winkelgeschwindigkeit des Gyroskops w>>W ist.
Aus Formel (9) folgt, dass die Präzessionsgeschwindigkeit W direkt proportional zu M und umgekehrt proportional zum Kreiseldrehimpuls L ist. Ist die Wirkzeit der Kraft kurz, ist der Drehimpuls L groß genug, dann die Präzessionsgeschwindigkeit W wird klein sein. Die kurzzeitige Krafteinwirkung führt daher praktisch nicht zu einer Veränderung der Orientierung der Drehachse des Kreisels im Raum. Um ihn zu ändern, müssen über lange Zeit Kräfte aufgebracht werden.
Praktische Anwendung von Gyroskopen
Die oben beschriebenen Eigenschaften des Kreisels haben verschiedene praktische Anwendungen gefunden. Eine der ersten Anwendungen der Eigenschaften von Gyroskopen wurde in gezogenen Waffen gefunden. Nach dem Verlassen des Waffenrohrs wirkt die Luftwiderstandskraft auf das Projektil, dessen Moment das Projektil umkippen und seine Ausrichtung relativ zur Flugbahn auf zufällige Weise ändern kann, was sich negativ auf die Flugreichweite und die Treffgenauigkeit des Ziels auswirkt. Ein Schraubenzug im Lauf der Waffe verleiht dem austretenden Projektil eine schnelle Drehung um seine Achse. Das Projektil verwandelt sich in einen Kreisel und das äußere Moment der Luftwiderstandskraft bewirkt nur die Präzession seiner Achse um die Richtung der Tangente an die Flugbahn des Projektils. Gleichzeitig bleibt eine bestimmte Ausrichtung des Projektils im Raum erhalten.
Eine weitere wichtige Anwendung von Kreiseln sind verschiedene Kreiselinstrumente: Kreiselhorizon, Kreiselkompass usw. Ausgeglichene Gyroskope werden auch verwendet, um eine bestimmte Richtung der Flugzeugbewegung beizubehalten (Autopilot). Zu diesem Zweck ist das Gyroskop an einer Kardanaufhängung montiert, die die Wirkung externer Kraftmomente verringert, die während des Flugzeugmanövers auftreten. Dadurch behält die Achse des Kreisels ihre Richtung im Raum bei, unabhängig von der Bewegung des Flugzeugs. Wenn die Richtung der Flugzeugbewegung von der durch die Gyroskopachse angegebenen Richtung abweicht, werden automatische Befehle angezeigt, die in die angegebene Richtung zurückkehren.
Das beschriebene Verhalten des Kreisels liegt auch dem als Kreiselkompass (Kreiselkompass) bezeichneten Gerät zugrunde. Dieses Gerät ist ein Gyroskop, dessen Achse sich in einer horizontalen Ebene frei drehen kann. Wenn die Achse des Kreisels nicht mit der Richtung des Meridians übereinstimmt, entsteht aufgrund der Erdrotation eine Kraft, die dazu neigt, die Achse in Richtung senkrecht zum Horizont zu drehen. Aufgrund des Kreiseleffekts dreht es sich jedoch in horizontaler Richtung, bis die Richtung mit dem Meridian übereinstimmt und genau nach Norden zeigt. Ein Kreiselkompass ist im Vergleich zu einem Kompass mit Magnetnadel insofern günstig, als seine Messwerte nicht um die sogenannte magnetische Deklination (verbunden mit der Nichtübereinstimmung der geografischen und magnetischen Pole der Erde) korrigiert werden müssen, und dies auch nicht notwendig, Maßnahmen zu ergreifen, um die Auswirkungen magnetischer Interferenzen vom Körper und Ausrüstungsbehälter zu kompensieren.
Beschreibung des Versuchsaufbaus
Der Versuchsaufbau (Abb. 6) besteht aus folgenden Haupteinheiten:
1. Kreiselscheibe.
2. Hebel mit metrischer Skala.
3. Durch Bewegen der Last entlang des Hebels 2 wird der Wert des Kraftmoments eingestellt.
4. Scheibe mit Winkelskala zur Bestimmung des Drehwinkels der Kreiselachse in der Horizontalebene während der Präzession.
5. Mess- und Kontrollblock.

1. Bestimmen Sie den Gewichtsmodul für mehrere Positionen der Last z am Kreiselhebel:
![]() ,
,
wobei m die Masse der Last ist, z p die Koordinate der Last auf der metrischen Skala des Hebels ist, wenn der Kreisel ausbalanciert ist.
2. Bestimmen Sie für jede Position der Last die Rotationszeit der Kreiselachse Δ t zu einem gegebenen Winkel Δ φ und berechnen Sie die Winkelgeschwindigkeit der Präzession:
3. Berechnen Sie den Impulswert des Kreisels für jede der Messungen:
4. Berechnen Sie den Mittelwert des Impulses des Kreisels:
Wobei N die Anzahl der Messungen ist.
5. Berechnen Sie das Trägheitsmoment des Kreisels mit der Formel I = L/w (w ist die Winkelgeschwindigkeit des Kreisels, w = 2pn, n ist die Anzahl der Motorumdrehungen pro Zeiteinheit) und bestimmen Sie den absoluten und relativen Fehler bei der Bestimmung des Trägheitsmoments des Kreisels.
Testfragen
1. Wie groß ist der Drehimpuls eines materiellen Punktes relativ zu einem Punkt?
2. Das Grundgesetz der Dynamik der Rotationsbewegung.
3. Was ist das Kraftmoment um einen Punkt?
4. Impuls eines absolut starren Körpers.
5. Trägheitsmoment eines starren Körpers um eine gegebene Achse.
6. Formulieren Sie den Drehimpulserhaltungssatz.
7. Was ist ein Gyroskop?
8. Was ist der Kreiseleffekt?
9. Was wird als Kreiselpräzession bezeichnet und unter welchen Bedingungen wird sie beobachtet?
10. Wie groß ist die Winkelgeschwindigkeit der Präzession?
Literatur
1. Saveliev I.V. Lehrgang Allgemeine Physik. Proz. Zuschuss. In 3 Bänden T.1 Mechanik. Molekulare Physik. M.: Wissenschaft. Chefredakteur physik.math. lit., 19873. -432 p.
2. Trofimova T.I. Physikkurs. Proz. Zuschuss für Universitäten. M.: Höher. Shk., 2003. -541 p.
GYROSKOP(aus dem Griechischen gyreuo - ich drehe mich, ich drehe mich und skopeo - ich schaue, ich beobachte) - ein schnell rotierender symmetrischer fester Körper, dessen Rotationsachse (Symmetrieachse) to-rogo seine Richtung im Raum ändern kann. Rotierende Himmelskörper, Artilleriegeschosse, Rotoren von auf Schiffen installierten Turbinen, Flugzeugpropeller usw. haben Schwerkrafteigenschaften. Technik von G. - grundlegend. Element verschiedener Gyroskope. Geräte oder Instrumente weit verbreitet für automatische Steuern Sie die Bewegung von Flugzeugen, Schiffen, Torpedos, Raketen und in einer Reihe anderer Kreiselsysteme. Stabilisierung, für Navigationszwecke (Anzeigen von Kurs, Wende, Horizont, Himmelsrichtungen usw.), zum Messen von Winkeln oder Ankommenden. Geschwindigkeiten von sich bewegenden Objekten (z. B. Raketen) und in vielen anderen. andere Fälle (z. B. beim Passieren von Stollenschächten, beim Bau von U-Bahnen, beim Bohren von Brunnen).
Damit sich die G.-Achse frei im Raum drehen kann, wird G. meist in sogenannten Ringen fixiert. Kardanringe (Abb. 1), in Krom Achse vnutr. und ext. Ringe und G.-Achse schneiden sich in einem Punkt, genannt. Aufhängungszentrum. In einer solchen Aufhängung montiert, hat ein Messgerät drei Freiheitsgrade und kann sich beliebig um den Mittelpunkt der Aufhängung drehen. Fällt der Schwerpunkt von G. mit dem Aufhängepunkt zusammen, wird G. gerufen. ausgeglichen oder astatisch. Das Studium der Bewegungsgesetze der Schwerkraft ist eine Aufgabe der Dynamik starrer Körper.
Reis. 1. Klassische Gimbals, a- äußerer Ring b- Innenring in-Rotor.

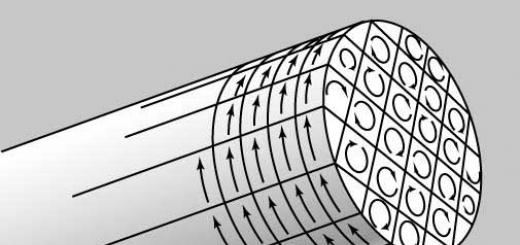
Reis. 2. Präzession des Kreisels. Die Winkelgeschwindigkeit der Präzession richtet sich damit nach dem Vektor des Eigendrehimpulses H
tendenziell mit dem Momentenvektor zusammenfällt M
Paar, das auf den Kreisel einwirkt.
Grundlegende Eigenschaften eines Kreisels. Wenn ein Kräftepaar ( P-F) mit Moment ( h- die Schulter der Kraft) (Abb. 2), dann beginnt sich G. (wider Erwarten) zusätzlich nicht um die Achse zu drehen X, senkrecht zur Ebene des Paares und um die Achse herum beim, liegend in dieser Ebene und senkrecht zur eigentlichen. Körper z-Achse. Dies wird ergänzen. Bewegung genannt Präzession. Die Präzession von G. tritt in Bezug auf auf Trägheitsbezugssystem(zu den auf die Fixsterne gerichteten Achsen) mit einer Winkelgeschwindigkeit

Abb. 13. Richtungskreisel.
Eine Reihe von Instrumenten macht sich auch die Eigenschaft von Gas zunutze, sich unter Einwirkung konstant aufgebrachter Kräfte gleichmäßig zu präzedieren. Also, wenn durch Ergänzung. Last, um die Präzession von G. mit einer Winkelgeschwindigkeit zu verursachen, die numerisch gleich und entgegengesetzt zu der vertikalen Komponente der Winkelgeschwindigkeit der Erdrotation ist (wobei U- die Winkelgeschwindigkeit der Erde, - der Breitengrad des Ortes), dann behält die Achse eines solchen G. mit unterschiedlicher Genauigkeit eine unveränderte Richtung relativ zu den Kardinalpunkten bei. Während mehrerer Stunden, bis sich ein Fehler von 1-2° akkumuliert, kann ein solches G., genannt Gyroazimuth, oder G.-Richtung (Abb. 13), den Kompass ersetzen (z. B. in Flugzeugen, insbesondere in der Polarfliegerei, wo der Messwerte des Magnetkompasses unzuverlässig). Ähnlich wie G., jedoch mit deutlich größerer Verschiebung des Schwerpunktes von der Präzessionsachse, kann die Strömung bestimmt werden. die Geschwindigkeit eines Objekts, das sich in Richtung einer Achse bewegt bb 1 , mit beliebiger Beschleunigung (Abb. 14). Abstrahieren wir vom Einfluss der Schwerkraft, so können wir davon ausgehen, dass das Moment der übertragenden Trägheitskraft auf das G wirkt. Q, wo t- Masse G., l- Schulter. Dann präzediert das Gyroskop gemäß Formel (1) um die Achse bb 1 mit Winkelgeschwindigkeit . Nach Integration der letzten Gleichheit erhalten wir , wo - beg. Objektgeschwindigkeit. T. o. stellt sich heraus, dass es möglich ist, die Geschwindigkeit eines Objekts zu bestimmen v zu jedem Zeitpunkt entlang des Winkels , auf dem sich G. zu diesem Zeitpunkt um die Achse drehen wird bb ein . Dazu muss das Gerät mit einem Umdrehungszähler und einem Gerät ausgestattet sein, das vom Gesamtdrehwinkel den Winkel abzieht, um den sich die Turbine aufgrund der Wirkung des Schwerkraftmoments drehen wird. Ein solches Gerät (ein Integrator scheinbarer Längsbeschleunigungen) bestimmt die vertikalen Geschwindigkeiten. Raketenstart; In diesem Fall muss die Rakete stabilisiert werden, damit sie sich nicht um ihre Symmetrieachse dreht.

Reis. 14. Gyroskopisches Messgerät für die Aufstiegsgeschwindigkeit der Rakete. - Hubbeschleunigung; g- Erdbeschleunigung; P - Schwerkraft, Q- Trägheitskraft, - eigenes kinetisches Moment.
In etlichen modernen Strukturen verwenden die sog. schwimmen oder integrieren, G. Der Rotor eines solchen G. befindet sich in einem Gehäuse - einem in eine Flüssigkeit getauchten Schwimmer (Abb. 15). Wenn sich der Schwimmer um seine Achse dreht X Moment wirkt auf G. Mx viskose Reibung, proportional zur Winkelgeschwindigkeit der Rotation . Dank dessen stellt sich heraus, dass G. ihn zur Anzeige zwingen wird. Rotation um eine Achse beim, dann ist die Winkelgeschwindigkeit dieser Drehung gemäß Gleichung (1) proportional zu . Dadurch erhöht sich der Drehwinkel des Schwimmers um die Achse X wiederum proportional zum Integral über die Zeit (deshalb heißt G. integrierend). Zusätzlich elektrisch und elektromechanisch. Geräte ermöglichen es, entweder die Winkelgeschwindigkeit dieses G. zu messen oder es zu einem Element einer Stabilisierungsvorrichtung zu machen. Im ersten Fall speziell Elektromagnete erzeugen ein Moment um die Achse X, gerichtet gegen die Drehung des Schwimmers; Die Größe dieses Moments wird so eingestellt, dass der Schwimmer stoppt. Dann einen Augenblick M1 wie man den Moment ersetzt Mx Kräfte der viskosen Reibung und daher wird gemäß f-le (1) die Winkelgeschwindigkeit proportional zu dem Wert sein M 1, bestimmt durch die Stärke des Stroms, der durch die Wicklungen des Elektromagneten fließt. Im zweiten Fall beispielsweise beim Stabilisieren um eine feste Achse beim, wird der Körper des integrierenden G. auf der Plattform platziert, die sich um die Achse drehen kann beim Spezialist. Elektromotor (Abb. 16). Um das Prinzip der Stabilisierung zu erklären, nehmen Sie an, dass sich die Basis, auf der sich die Plattformlager befinden, selbst um die Achse dreht beim in irgendeine Ecke. Wenn der Motor ausgeschaltet ist, dreht sich die Plattform in diesem Fall zusammen mit der Basis im gleichen Winkel, und der Schwimmer dreht sich um die Achse X um einen Winkel proportional zum Winkel . Wenn nun der Motor die Plattform in die entgegengesetzte Richtung dreht, bis der Schwimmer in seine ursprüngliche Position zurückkehrt, kehrt gleichzeitig auch die Plattform in ihre ursprüngliche Position zurück. Sie können den Motor stufenlos so steuern, dass der Drehwinkel des Schwimmers auf Null reduziert wird, dann wird die Plattform stabilisiert. Die Kombination von zwei Schwimmern in einer gemeinsamen Aufhängung mit ähnlich gesteuerten Elektromotoren führt zur Stabilisierung einer festen Richtung und drei - zum Weltraum. Stabilisierung, die insbesondere in Trägheitsnavigationsschemata verwendet wird.

Reis. 15. Schwebendes integrierendes Gyroskop: a- Kreiselrotor; b- Schwimmer, in dessen Körper sich das Lager der Rotorachse befindet; in- Stützflüssigkeit; G- rahmen; d- Stahlzapfen in Steinstützen; e- Drehwinkelsensor des Schwimmers relativ zum Körper; Gut- ein elektromagnetisches Gerät, das ein Moment um die Achse des Schwimmers ausübt.

Reis. 16. Stabilisierung um eine feste Achse mittels Schwimmkreisel a- Schwimmerkreisel; b- Verstärker, in- Elektromotor; G- Plattform, d- Basis.

Reis. 17. Power-Gyro-Rahmen: a- der eigentliche Rahmen; b- Kreisel; in- ein Partner; G- Drehwinkelsensor des Gyroskops relativ zum Rahmen; d- Sensorsignalverstärker; e- stabilisierender Motor; Gut- Drehmomentsensor.
Bei dem oben betrachteten Stabilisierungssystem spielt die Empfindlichkeit eine Rolle. ein Element, das Abweichungen eines Objekts von einer bestimmten Position erkennt, und die Rückkehr zu dieser Position durch einen Elektromotor durchgeführt wird, der ein entsprechendes Signal erhält. Ähnliche Kreiselsysteme. Stabilisierung genannt. Indikator (Stabilisatoren der indirekten Wirkung). Daneben werden in der Technik sogenannte Systeme eingesetzt. Leistungsgyroskop. Stabilisierung (direkt wirkende Stabilisatoren), bei denen die G. direkt die Bemühungen übernehmen, die bei der Durchführung der Stabilisierung stören, und die Motoren unterstützend spielen. Rolle, G. teilweise oder vollständig entladen und dadurch die Winkel ihrer Präzession begrenzen. Solche Systeme sind strukturell einfacher als Indikatorsysteme. Ein Beispiel ist ein einachsiger Zweikreisel. Rahmen (Abb. 17); im Rahmen befindliche Rotoren rotieren in unterschiedliche Richtungen. Angenommen, eine Kraft wirkt auf den Rahmen und neigt dazu, ihn um die Achse zu drehen X und melde die Winkelgeschwindigkeit. Dann beginnt gemäß der Zhukovsky-Regel ein Paar auf das Gehäuse 1 einzuwirken und neigt dazu, die Rotorachse mit der Achse auszurichten X. Infolgedessen beginnt die Schwerkraft um die Achse zu präzedieren j 2 mit einer gewissen Winkelgeschwindigkeit . Gehäuse 2
aus dem gleichen Grund wird um die Achse präzedieren j 2 in die entgegengesetzte Richtung. Die Drehwinkel der Gehäuse sind gleich, da die Gehäuse durch eine Zahnkupplung verbunden sind. Aufgrund dieser Präzession an den Gehäuselagern 1
Ein neues Paar wird handeln und sich bemühen, die Rotorachse mit der Achse auszurichten j ein . Das gleiche Paar wirkt auf die Gehäuselager 2
. Die Momente dieser Paare sind entgegengesetzt gerichtet (was aus der Zhukovsky-Regel folgt) und stabilisieren den Rahmen, d. h. verhindern, dass er sich um die Achse dreht X. Wenn jedoch die Präzessionen von G. nicht begrenzt sind, dann, wie aus Formel (3) ersichtlich, wenn die Gehäuse um die Achsen gedreht werden j 1 ,
um 2 90° stoppt die Stabilisierung. Daher befindet sich auf der Achse eines der Gehäuse ein Sensor, der den Drehwinkel des Gehäuses relativ zum Rahmen registriert und den Stabilisierungsmotor steuert. Das vom Motor ausgehende Drehmoment ist dem Moment entgegengesetzt gerichtet, das dazu neigt, den Rahmen um die Achse zu drehen X; infolgedessen stoppt die Präzession von G. Der betrachtete Rahmen wird bezüglich Rotation um die Achse stabilisiert X. Drehen Sie den Rahmen um eine beliebige Achse senkrecht dazu X, können Sie frei, aber die resultierende Kreisel. Moment kann bedeuten. Druck auf G. Lager und deren Gehäuse. Die Kombination von drei solchen Rahmen mit zueinander senkrechten Achsen führt zu Räumen. Stabilisierung (z. B. künstlicher Satellit).
In Kraft gyroskopisch Systemen kommt es im Gegensatz zu freien G. aufgrund der großen Trägheitsmomente der stabilisierten Massen zu sehr merklichen Schwingungen. Nutationsbewegungen. Sonderangebote müssen akzeptiert werden. Maßnahmen, um diese Schwingungen zu dämpfen, da es sonst zu Eigenschwingungen im System kommt. In der Technik kommen auch andere Kreisel zum Einsatz. Geräte, deren Funktionsprinzip auf den Eigenschaften von G.
Zündete.: Bulgakov B.V., Angewandte Theorie der Gyroskope, 3. Aufl., M., 1976; Nikolay E. L., Gyroscope in gimbals, 2. Aufl., M., 1964; Maleev P. I., Neue Typen von Gyroskopen, L., 1971; Magnus K., Gyroskop. Theorie und Anwendung, übers. aus Deutsch, M., 1974; Ishlinsky A. Yu, Orientierung, Gyroskope und Trägheitsnavigation, M., 1976; his, Mechanik der relativen Bewegung und Trägheitskräfte, M., 1981; Klimov D. M., Kharlamov S. A., Dynamik eines Kreisels in einer kardanischen Aufhängung, M., 1978; Zhuravlev V. F., Klimov D. M., Wave Solid-State Gyroscope, M., 1985; Novikov L. 3., Shatalov M. Yu., Mechanics of dynamically tuned gyroscopes, M., 1985.
A. Ju Ishlinsky.
Abb.91
Abb.90
Abb.89
Gyroskope. Kostenloses Gyroskop.
Die Auseinandersetzung mit diesen Fragestellungen ist in der Disziplin „Maschinenteile“ notwendig.
Ein Kreisel ist ein massiver axialsymmetrischer Körper, der sich mit hoher Winkelgeschwindigkeit um seine Symmetrieachse dreht.
In diesem Fall sind die Momente aller äußeren Kräfte, einschließlich der Gewichtskraft, bezogen auf den Massenmittelpunkt des Kreisels gleich Null. Dies kann z. B. dadurch realisiert werden, dass das Gyroskop in den in Abb. 89 gezeigten Gimbals platziert wird.
und der Drehimpuls bleibt erhalten:
Der Kreisel verhält sich wie ein freierer Rotationskörper. Abhängig von den Anfangsbedingungen sind zwei Optionen für das Verhalten des Kreisels möglich:
1. Dreht man den Kreisel um die Symmetrieachse, so fallen die Richtungen von Drehimpuls und Winkelgeschwindigkeit zusammen:
und die Richtung der Symmetrieachse des Kreisels bleibt unverändert. Dies kann durch Drehen des Stativs, auf dem sich der Gimbal befindet, überprüft werden - bei beliebigen Drehungen des Stativs behält die Achse des Kreisels die gleiche Richtung im Raum. Aus dem gleichen Grund behält der Kreisel, auf einen Karton „abgesetzt“ und hochgeschleudert (Abb. 90), während des Fluges die Richtung seiner Achse bei und dreht sich, mit seiner Spitze auf den Karton fallend, stetig weiter bis seine kinetische Energie wird verbraucht.
Ein freier Kreisel, der um die Symmetrieachse gedreht wird, hat eine sehr große Stabilität. Aus der Grundgleichung der Momente folgt die Änderung des Drehimpulses
Ist das Zeitintervall klein, dann ist es auch klein, dh bei kurzfristigen Einflüssen auch sehr großer Kräfte ändert sich die Bewegung des Kreisels nur unwesentlich. Der Kreisel widersteht gewissermaßen Versuchen, seinen Drehimpuls zu ändern, und scheint "gehärtet" zu sein.
Nehmen wir einen kegelförmigen Kreisel, der in seinem Schwerpunkt O auf einem Stützstab ruht (Abb. 91). Wenn sich der Körper des Gyroskops nicht dreht, befindet er sich in einem Zustand des indifferenten Gleichgewichts, und der geringste Stoß bewegt ihn von seinem Platz. Bringt man diesen Körper in schnelle Rotation um seine Achse, so können auch kräftige Schläge mit einem Holzhammer die Richtung der Kreiselachse im Raum nicht wesentlich verändern. Die Stabilität eines freien Kreisels wird in verschiedenen technischen Geräten genutzt, beispielsweise in einem Autopiloten.
2. Wenn der freie Kreisel so gedreht wird, dass der momentane Winkelgeschwindigkeitsvektor und die Symmetrieachse des Kreisels nicht zusammenfallen (in der Regel ist diese Fehlanpassung bei schneller Drehung unbedeutend), dann wird eine als „frei regelmäßige Präzession" beobachtet wird. In Bezug auf das Gyroskop wird es als Nutation bezeichnet. Dabei liegen die Symmetrieachse des Kreisels, die Vektoren und in der gleichen Ebene, die um die Richtung rotiert mit einer Winkelgeschwindigkeit gleich der, in der das Trägheitsmoment des Kreisels relativ zur Hauptmittelachse senkrecht auf der steht Symmetrieachse. Diese Winkelgeschwindigkeit (nennen wir sie Nutationsrate) bei der schnellen Eigendrehung des Kreisels fällt recht groß aus, und die Nutation wird vom Auge als kleines Zittern der Symmetrieachse des Kreisels wahrgenommen.
Nutationsbewegungen lassen sich leicht mit dem in Abb. 91 - tritt auf, wenn ein Hammer auf die Stange eines Kreisels schlägt, der sich um seine Achse dreht. Dabei gilt: Je stärker der Kreisel gedreht wird, desto größer wird sein Drehimpuls – desto größer die Nutationsrate und desto „kleiner“ das Zittern der Figurenachse. Diese Erfahrung zeigt ein weiteres charakteristisches Merkmal der Nutation - im Laufe der Zeit nimmt sie allmählich ab und verschwindet. Dies ist eine Folge der unvermeidlichen Reibung im Kreisellager.
Unsere Erde ist eine Art Kreisel, und auch für sie ist die Nutationsbewegung charakteristisch. Dies liegt daran, dass die Erde von den Polen etwas abgeflacht ist, wodurch die Trägheitsmomente um die Symmetrieachse und um die in der Äquatorebene liegende Achse unterschiedlich sind. Gleichzeitig a. Im Bezugssystem der Erde bewegt sich die Rotationsachse entlang der Kegeloberfläche um die Symmetrieachse der Erde mit Winkelgeschwindigkeit , das heißt, sie vollzieht in etwa 300 Tagen eine Umdrehung. Tatsächlich erweist sich diese Zeit aufgrund der nicht absoluten Starrheit der Erde als länger - sie beträgt ungefähr 440 Tage. Gleichzeitig beträgt der Abstand des Punktes auf der Erdoberfläche, durch den die Rotationsachse verläuft, von dem Punkt, durch den die Symmetrieachse verläuft (dem Nordpol), nur wenige Meter. Die Nutationsbewegung der Erde stirbt nicht aus - anscheinend wird sie durch jahreszeitliche Veränderungen an der Oberfläche unterstützt
Betrachten wir nun die Situation, wenn eine Kraft auf die Kreiselachse wirkt, deren Wirkungslinie nicht durch den Ankerpunkt verläuft. Experimente zeigen, dass sich der Kreisel in diesem Fall auf sehr ungewöhnliche Weise verhält.
Wenn eine Feder an der Achse eines im Punkt O angelenkten Kreisels (Abb. 92) befestigt und mit einer Kraft nach oben gezogen wird, bewegt sich die Achse des Kreisels nicht in Richtung der Kraft, sondern senkrecht dazu seitwärts. Diese Bewegung wird als Präzession des Kreisels unter Einwirkung einer äußeren Kraft bezeichnet.
Der Zweck der Arbeit: Untersuchung der Bewegungsmerkmale eines Kreisels unter Einwirkung des Moments äußerer Kräfte, Messung der Winkelgeschwindigkeit der Präzession und des Drehimpulses des Kreisels
Ein Gyroskop ist ein symmetrischer starrer Körper, der sich schnell um eine Symmetrieachse dreht, die seine Richtung im Raum ändern kann.
Zu Demonstrationszwecken können Kreisel der Bauart, die schematisch in Abb. 6.1. Kreiselrad Zu(Rotor) ist auf einer Achse montiert, die sich sowohl um eine horizontale Achse als auch um eine vertikale Achse drehen kann, d.h. kann jede Position im Raum einnehmen. (Die vertikalen Achsenabweichungen in dieser Konstruktion sind auf nicht sehr große Winkel beschränkt). Damit das Gewichtsmoment relativ zu den drei Achsen des Kreisels gleich Null ist, muss der Schwerpunkt des Kreisels mit dem Schnittpunkt der drei Drehachsen zusammenfallen. Der Kreiselrotor wird durch einen Elektromotor in schnelle Rotation versetzt.
Reis. 6.1. Erfahrungsprogramm
Da das Gravitationsmoment relativ zum Punkt O gleich Null ist, bleibt die Achse des rotierenden Kreisels in Abwesenheit anderer äußerer Kräfte stationär. Das Gyroskop hat einen konstanten Drehimpuls, der entlang der festen Rotationsachse des Gyroskops gerichtet ist. Wenn äußere Kräfte auf das Gyroskop wirken, beginnt sich die Achse des Gyroskops zu bewegen - eine Drehung um andere Achsen tritt auf. Dann fällt sie nicht mehr mit der Achse des Kreisels zusammen, sondern bleibt immer nahe bei ihr. Wenn wir also wissen, wie sich der Vektor ändert, können wir sagen, wie ungefähr sich die Achse des Kreisels bewegt.
Die Drehung eines starren Körpers wird durch die Gleichung bestimmt
Hier ist das Moment der äußeren Kräfte, = ich, wo ich das Trägheitsmoment des Kreisels und seine Winkelgeschwindigkeit ist. Gleichung (6.1) zeigt, dass sich der Vektor nur ändert, wenn das Drehmoment wirkt. Daher kann sich die Achse des Kreisels nur nennenswert bewegen, solange es einen Moment gibt, der die Richtung ändert. Änderungen in kurzen Zeitintervallen nach Gleichung (6.1) werden durch die Beziehung bestimmt
Bei einer kurzfristigen Einwirkung äußerer Kräfte (ein scharfer Schlag) ist es daher klein und wenig - ändert sich fast nicht. Folglich sollte sich auch die Richtung der Kreiselachse nur sehr wenig ändern. Tatsächlich geht die Achse des Gyroskops bei einem scharfen Aufprall nicht weit, sondern zittert und bleibt fast an Ort und Stelle. ändert sich nach dem Aufprall nicht mehr. Aber die Achse des Kreisels sollte nicht mit der Richtung zusammenfallen, sondern nur nahe daran liegen. Es kann kleine Bewegungen um die Richtung machen. Solche Bewegungen der Kreiselachse um die Richtung nennt man Nutationen. . Das Zittern der Kreiselachse nach dem Aufprall ist eine der Arten von Nutationen.
Wenn sich der Kreisel mit sehr hoher Geschwindigkeit um seine Achse dreht, fällt der Drehimpulsvektor auch bei langsamen Drehungen um andere Achsen praktisch mit der Achse des Kreisels zusammen. Im Folgenden nehmen wir an, dass die Richtung mit der Kreiselachse zusammenfällt.
Bei längerer Einwirkung äußerer Kräfte ändert der Vektor seine Richtung im Raum. Zusammen mit ihm ändert es seine Richtung und Achse des Kreisels. Richtung? stimmt mit der Richtung überein, d.h. nicht mit der Richtung der Kraft, sondern mit der Richtung des Kraftmoments relativ zur Achse O. Wenn Sie mit etwas Kraft von der Seite auf den Kreisel drücken (Abb. 6.1), bewegt sich seine Achse nicht in die Richtung der Kraft, sondern in Richtung des Kraftmoments.
Wirkt eine Kraft auf den Kreisel, entsteht ein konstantes Moment , dann ändert sich die Richtung für die gleichen Zeitintervalle um den gleichen Betrag? = ?t. Wenn gleichzeitig in der Bewegungsebene die Achse des Kreisels liegt, dann? liegt in der gleichen Ebene; Der Vektor bleibt in derselben Ebene und dreht sich mit konstanter Geschwindigkeit. Zusammen mit ihm dreht sich auch die Achse des Gyroskops. Diese Bewegung der Achse wird als Präzession bezeichnet.
Die Präzession eines Kreisels kann demonstriert werden, indem man ein kleines Gewicht an die Achse des Kreisels hängt m(Abb. 6.1) in einiger Entfernung r. Die Schwerkraft erzeugt einen Moment, der die ganze Zeit in einer horizontalen Ebene liegt. Bei Vorhandensein einer Last dreht sich die Kreiselachse in einer horizontalen Ebene mit konstanter Geschwindigkeit.
Lassen Sie uns die Winkelgeschwindigkeit der Drehung der Kreiselachse berechnen.
Während? t die Kreiselachse wird um einen Winkel gedreht
Unter Berücksichtigung der Beziehung (6.2) erhält man für die Rotationswinkelgeschwindigkeit der Achse (Präzessionsgeschwindigkeit).
Da a, schreiben wir die Beziehung (6.3) in die Form um
Aus dem resultierenden Ausdruck folgt, dass je kleiner das Moment der auf den Kreisel wirkenden äußeren Kräfte und je größer der Impuls des Kreisels ist, desto geringer ist die Geschwindigkeit seiner Präzession.
Schiebt man den Präzessionskreisel in Präzessionsrichtung, so hebt sich das Ende der Achse, an der das Gewicht hängt. Im Gegenteil, wenn Sie auf den Kreisel entgegen der Präzessionsrichtung drücken, fällt das Ende der Achse mit der Last. Äußere Kräfte, die die Präzession verhindern, führen zum Absinken der Last. Während der Präzession wirken Reibungskräfte im Lager auf die vertikale Achse und verhindern eine Präzession, sodass die Achse des präzedierenden Kreisels nicht in der horizontalen Ebene bleibt - das Ende der Achse, an dem die Last hängt, senkt sich allmählich ab.
Die Präzession des Kreisels erfolgt während des Wirkens des äußeren Moments mit konstanter Geschwindigkeit und stoppt sofort, sobald das äußere Moment verschwindet. Die Bewegung der Kreiselachse ist trägheitsfrei. Dies liegt daran, dass die Rotationsgeschwindigkeit der Achse durch die einwirkenden Kräfte bestimmt wird. Trägheit ist eine Manifestation der Tatsache, dass Beschleunigungen durch Kräfte bestimmt werden.
Bei allen beschriebenen Experimenten wirken nicht nur äußere Kräfte auf den Kreisel, sondern der Kreisel wirkt auch auf jene Körper, die die Quelle dieser Kräfte sind. Wenn wir unsere Hand auf die Achse des Gyroskops drücken, drückt das Gyroskop mit der gleichen Kraft auf die Hand. Wenn der Kreisel starr mit einem bestimmten Körper verbunden ist, dann treten bei jeder Bewegung dieses Körpers, begleitet von einer Richtungsänderung der Achse des Kreisels, Kräfte auf, die von der Seite des Kreisels auf den Körper einwirken. Diese Kräfte spielen oft eine herausragende Rolle.
Zum Beispiel sind die rotierenden Teile der Schiffsmaschinen ein Kreisel mit einem großen Impulsmoment. Beim Stampfen des Schiffes (das Heben und Senken des Schiffsbugs) ändert sich die Richtung des Drehimpulses der Maschine. Dadurch wirken Druckkräfte von der Welle auf die Lager. Diese Kräfte liegen in der horizontalen Ebene und drehen das Schiff um die vertikale Achse. Diese „Kursorientierung“ macht sich bei kleinen Schiffen mit leistungsstarken Maschinen (Schlepper) bemerkbar.
Die Kräfte, die entstehen, wenn sich die Richtung der Drehachse des Kreisels ändert, können zur Stabilisierung des Schiffes genutzt werden (Rollen reduzieren). Dazu werden riesige Kreisel mit hoher Geschwindigkeit verwendet.
Alle beschriebenen Eigenschaften des Kreisels erklären sich dadurch, dass die Bewegung der Kreiselachse der Gleichung (6.1) gehorcht. Die Bewegung der Kreiselachse wird nicht durch die Richtung der Kraft bestimmt, sondern durch die Richtung des Moments äußerer Kräfte. Dieser Moment wird aber durch die von außen auf das gesamte Gerät einwirkenden Kräfte nur dann bestimmt, wenn der Kreisel völlig frei ist, d.h. wenn das Gerätedesign eine beliebige Position der Kreiselachse zulässt. Wenn das Gyroskop nicht vollständig frei ist, müssen die Momente jener Kräfte berücksichtigt werden, die von der Seite der Lager, in denen es befestigt ist, auf die Achse des Gyroskops wirken können.
Diese Kraftmomente können das Verhalten des Kreisels unter Einwirkung äußerer Kräfte vollständig verändern. Wenn Sie beispielsweise die vertikale Achse fixieren und es ermöglichen, die Achse des Gyroskops nur in der horizontalen Ebene zu drehen, wird es vollständig "gehorsam". Unter der Wirkung einer auf das Gyroskop in der horizontalen Ebene ausgeübten Kraft beginnt sich die Achse des Gyroskops in Richtung der Kraft zu drehen. Diese Verhaltensänderung des Kreisels erklärt sich dadurch, dass neben dem Kraftmoment auch ein Kraftmoment von der Seite des Stativs, in dem es befestigt ist, auf die Achse wirkt. Das Auftreten dieses Moments ist leicht zu erklären. Während zunächst keine Kraft auf den Kreisel wirkt, wirken auch keine Momente von der Seite des Ständers auf ihn ein. Das Gyroskop "weiß nicht", dass es fixiert ist. Daher verhält es sich zunächst wie ein völlig freier Kreisel: Unter Einwirkung einer Kraft, die ein vertikal nach oben gerichtetes Moment erzeugt, beginnt das Ende der Kreiselachse zu steigen.
Die vertikale Achse, mit der die Kreiselachse starr verbunden ist, ist leicht gebogen, und auf die Kreiselachse wirkt ein Moment elastischer Kräfte. Unter der Wirkung dieses Moments bewegt sich die Achse des Kreisels in der horizontalen Ebene genau in die Richtung, in der die Kraft wirkt. Daher ist ein unfreier Kreisel „gehorsam“: Seine Achse dreht sich in die Richtung, in die eine äußere Kraft ihn zu drehen versucht . Bei einem freien Kreisel dreht sich die Achse in einer Ebene senkrecht zur Kraft.
Wenn auf ein rotierendes Gyroskop ein paar Kräfte ausgeübt werden, die dazu neigen, es um eine Achse senkrecht zur Rotationsachse zu drehen, dreht sich das Gyroskop tatsächlich, aber nur um die dritte Achse, die senkrecht zu den ersten beiden ist.
Eine genauere Analyse ähnlicher Phänomene wie den oben beschriebenen zeigt, dass der Kreisel dazu neigt, seine Rotationsachse so zu positionieren, dass sie mit der erzwungenen Rotationsachse einen möglichst kleinen Winkel bildet und dass beide Rotationen in die gleiche Richtung erfolgen .
Diese Eigenschaft des Kreisels macht man sich beim Kreiselkompass zunutze, der vor allem in der Marine weit verbreitet ist. Der Kreiselkompass ist ein schnell rotierender Kreisel (Drehstrommotor, 25.000 Umdrehungen pro Minute), der auf einem speziellen Schwimmer in einem Gefäß mit Quecksilber schwimmt und dessen Achse in der Meridianebene liegt. In diesem Fall ist die Quelle des externen Drehmoments die tägliche Drehung der Erde um ihre Achse. Unter seiner Wirkung neigt die Rotationsachse des Gyroskops dazu, in Richtung mit der Rotationsachse der Erde zusammenzufallen, und da die Rotation der Erde kontinuierlich auf das Gyroskop einwirkt, nimmt die Achse des Gyroskops diese Position ein, d. h. wird entlang des Meridians aufgebaut und verbleibt darin genauso wie eine gewöhnliche Magnetnadel. Kreiselkompasse haben gegenüber Magnetkompassen eine Reihe von Vorteilen. Ihre Messwerte werden nicht durch Eisenmassen in der Nähe beeinflusst, sie sind nicht empfindlich gegenüber magnetischen Stürmen usw.
Gyroskope werden oft als Stabilisatoren verwendet. Sie werden installiert, um das Stampfen auf Hochseeschiffen zu reduzieren. Stabilisatoren für Einschienenbahnen wurden ebenfalls entwickelt; Ein massiver, schnell rotierender Kreisel im Inneren eines Einschienenwagens verhindert das Umkippen des Wagens. Rotoren für Kreiselstabilisatoren werden von 1 bis 100 oder mehr Tonnen hergestellt.
1. Freie Rotationsachsen. Betrachten wir zwei Fälle der Drehung eines starren Stabes um eine Achse, die durch den Massenmittelpunkt verläuft.
Wenn die Stange um die Achse gedreht wird OO und es sich selbst überlassen, dh die Rotationsachse von den Lagern lösen, dann im Fall von Abb. 71-a, die Ausrichtung der freien Rotationsachse relativ zur Stange ändert sich, da die Stange unter der Wirkung eines Paares von zentrifugalen Trägheitskräften, in eine horizontale Ebene verwandeln. Im Fall von Abb. 71-b ist das Moment eines Zentrifugalkräftepaars gleich Null, sodass sich die unverdrillte Stange weiter um die Achse dreht OO und nach ihrer Freilassung.
Die Rotationsachse, deren Position im Raum ohne Einwirkung irgendwelcher Kräfte von außen beibehalten wird, wird als freie Achse des Rotationskörpers bezeichnet. Daher ist die Achse, die senkrecht zum Stab steht und durch seinen Massenmittelpunkt geht, die freie Rotationsachse des Stabs.
Jeder starre Körper hat drei zueinander senkrechte freie Rotationsachsen, die sich im Massenmittelpunkt schneiden. Die Lage der freien Achsen für homogene Körper stimmt mit der Lage ihrer geometrischen Symmetrieachsen überein (Abb. 72).
 |
Beim Parallelepiped sind alle drei Achsen fixiert. Der Zylinder hat nur eine feste Achse, die mit der geometrischen Achse zusammenfällt. Alle drei Achsen einer Kugel sind nicht fixiert.
Freie Drehachsen werden auch genannt Hauptträgheitsachsen. Bei freier Drehung von Körpern um die Hauptträgheitsachsen sind nur Drehungen um diejenigen Achsen stabil, die den maximalen und minimalen Werten des Trägheitsmoments entsprechen. Wirken äußere Kräfte auf den Körper, so ist die Rotation nur um diejenige Hauptachse stabil, die dem maximalen Trägheitsmoment entspricht.
2. Gyroskop(aus dem Griechischen Gyreuo- drehen und skopeo- ich verstehe) - ein homogener Rotationskörper, der sich schnell um die Symmetrieachse dreht, deren Achse ihre Position im Raum ändern kann.
Wenn wir die Bewegung eines Kreisels untersuchen, berücksichtigen wir Folgendes:
a. Der Massenmittelpunkt des Kreisels fällt mit seinem Fixpunkt zusammen Ö. Ein solches Gyroskop wird genannt ausgewogen.
 b. Winkelgeschwindigkeit w die Drehung des Kreisels um die Achse ist viel größer als die Winkelgeschwindigkeit W der Bewegung der Achse im Raum, das heißt w >> W.
b. Winkelgeschwindigkeit w die Drehung des Kreisels um die Achse ist viel größer als die Winkelgeschwindigkeit W der Bewegung der Achse im Raum, das heißt w >> W.
B. Gyroskop-Drehimpulsvektor L fällt mit dem Winkelgeschwindigkeitsvektor zusammen w , da sich der Kreisel um die Hauptträgheitsachse dreht.
Lassen Sie die Kraft auf die Kreiselachse wirken F während der Zeit D t. Nach dem zweiten Dynamiksatz für Drehbewegungen ist also die Änderung des Drehimpulses des Kreisels über diese Zeit (26.1)
wo r ist der vom Fixpunkt aus gezeichnete Radiusvektor Ö zum Angriffspunkt der Kraft (Abb. 73).
Die Änderung des Drehimpulses des Kreisels kann als Drehung der Kreiselachse um einen Winkel mit der Winkelgeschwindigkeit betrachtet werden ![]() . (26.2)
. (26.2)
Dabei ist die Komponente der darauf wirkenden Kraft senkrecht zur Achse des Kreisels.
Unter der Kraft F An der Achse des Kreisels angelegt, dreht sich die Achse nicht in Richtung der Kraft, sondern in Richtung des Kraftmoments M relativ zu einem Fixpunkt Ö. Die Rotationsgeschwindigkeit der Kreiselachse ist zu jedem Zeitpunkt betragsmäßig proportional zum Kraftmoment und bei konstantem Kraftarm proportional zur Kraft selbst. Auf diese Weise, Bewegung der Kreiselachse ohne Trägheit. Dies ist der einzige Fall von Trägheitsbewegung in der Mechanik.
Die Bewegung der Kreiselachse unter Einwirkung einer äußeren Kraft wird als erzwungen bezeichnet Präzession Gyroskop (vom lateinischen praecessio - vorwärts gehen).
 3. Schlagwirkung auf die Kreiselachse. Bestimmen wir die Winkelverschiebung der Kreiselachse infolge einer kurzzeitigen Krafteinwirkung auf die Achse, also eines Stoßes. Kurz einwirken lassen dt auf der Achse des Kreisels in einem Abstand r aus der Mitte Ö Kraft wirkt F
. Unter dem Einfluss dieser Kraft F
dt die Achse dreht sich (Abb. 74) in Richtung des Impulses des von ihr erzeugten Kraftmoments M
dt zu einem gewissen Winkel
3. Schlagwirkung auf die Kreiselachse. Bestimmen wir die Winkelverschiebung der Kreiselachse infolge einer kurzzeitigen Krafteinwirkung auf die Achse, also eines Stoßes. Kurz einwirken lassen dt auf der Achse des Kreisels in einem Abstand r aus der Mitte Ö Kraft wirkt F
. Unter dem Einfluss dieser Kraft F
dt die Achse dreht sich (Abb. 74) in Richtung des Impulses des von ihr erzeugten Kraftmoments M
dt zu einem gewissen Winkel
dq = W dt=(rF/Iw)dt. (26.3)
Wenn sich der Angriffspunkt der Kraft nicht ändert, dann r= const und beim Integrieren erhalten wir. q = .(26.4)
Das Integral hängt jeweils von der Art der Funktion ab ( t). Unter normalen Bedingungen ist die Rotationswinkelgeschwindigkeit des Kreisels sehr hoch, sodass der Zähler oft viel kleiner ist als der Nenner und damit der Winkel q- kleiner Wert. Ein sich schnell drehender Kreisel ist stoßunempfindlicher, je größer sein Drehimpuls ist.
4. Interessanterweise funktioniert die Kraft, unter der die Kreiselachse präzediert, nicht. Dies liegt daran, dass der Punkt des Kreisels, auf den die Kraft ausgeübt wird, zu jedem Zeitpunkt in der Richtung senkrecht zur Richtung der Kraft verschoben wird. Daher ist das Skalarprodukt der Kraft und des kleinen Verschiebungsvektors immer Null.
Kräfte in dieser Manifestation werden gerufen gyroskopisch. Die Lorentzkraft ist also immer gyroskopisch und wirkt auf ein elektrisch geladenes Teilchen aus dem Magnetfeld, in dem es sich bewegt.
 5. Die Gleichgewichtsbedingung für TP. Damit sich das HP im Gleichgewicht befindet, ist es erforderlich, dass die Summe der äußeren Kräfte und die Summe der Momente der äußeren Kräfte gleich Null sind:
5. Die Gleichgewichtsbedingung für TP. Damit sich das HP im Gleichgewicht befindet, ist es erforderlich, dass die Summe der äußeren Kräfte und die Summe der Momente der äußeren Kräfte gleich Null sind:
![]() . (26.5)
. (26.5)
Es gibt 4 Arten von Waagen: stabil, instabil, sattelförmig und gleichgültig.
a. Die Gleichgewichtslage des TT ist stabil, wenn bei kleinen Abweichungen vom Gleichgewicht Kräfte auf den Körper wirken, die ihn tendenziell wieder in die Gleichgewichtslage bringen.
Abbildung 75 zeigt Situationen stabilen Gleichgewichts von Körpern im Schwerefeld. Die Gewichtskräfte sind Massenkräfte, daher wird die Resultierende der auf die Punktelemente des HP wirkenden Gewichtskräfte auf den Massenmittelpunkt aufgetragen. In solchen Situationen wird der Schwerpunkt als Schwerpunkt bezeichnet.
Eine stabile Gleichgewichtslage entspricht einer minimalen potentiellen Energie des Körpers.
 b. Beginnen bei kleinen Abweichungen von der Gleichgewichtslage Kräfte in Richtung des Gleichgewichts auf den Körper einzuwirken, so ist die Gleichgewichtslage instabil. Die instabile Gleichgewichtslage entspricht der relativen maximalen potentiellen Energie des Körpers (Abb. 76).
b. Beginnen bei kleinen Abweichungen von der Gleichgewichtslage Kräfte in Richtung des Gleichgewichts auf den Körper einzuwirken, so ist die Gleichgewichtslage instabil. Die instabile Gleichgewichtslage entspricht der relativen maximalen potentiellen Energie des Körpers (Abb. 76).
in. Sattelförmig ist ein solches Gleichgewicht, wenn bei der Bewegung entlang eines Freiheitsgrades das Gleichgewicht des Körpers stabil ist und bei der Bewegung entlang eines anderen Freiheitsgrades instabil ist. In der in Abbildung 77 gezeigten Situation ist die Position des Körpers in Bezug auf die Koordinate x stabil ist, und in Bezug auf die Koordinate j- instabil.
G. Entstehen beim Abweichen des Körpers von der Gleichgewichtslage keine Kräfte, die den Körper in die eine oder andere Richtung verschieben wollen, so wird die Gleichgewichtslage als indifferent bezeichnet. Zum Beispiel eine Kugel im Schwerefeld auf einer Äquipotentialfläche, ein starrer Körper, der am Punkt des Massenschwerpunkts (am Punkt des Schwerpunkts) aufgehängt ist (Abb. 78).
 |
In den Fällen, in denen der Körper auf einer Stütze ruht, ist das Gleichgewicht des Körpers umso stabiler, je größer die Fläche der Stütze und je niedriger der Schwerpunkt ist (Abb. 79).