Einführung
Die Hauptaufgabe des Radars besteht darin, Informationen über die untersuchten Objekte zu sammeln und zu verarbeiten. Bei bodengestützten Mehrpositionsradaren ist die gesamte Verarbeitung von Radarinformationen bekanntlich in drei Stufen unterteilt.
Primärverarbeitung besteht darin, ein Zielsignal zu erkennen und seine Koordinaten mit angemessener Qualität oder Fehlern zu messen.
Sekundärverarbeitung ermöglicht die Bestimmung der Flugbahnparameter jedes Ziels unter Verwendung von Signalen von einer oder mehreren MPRLS-Positionen, einschließlich Operationen zur Identifizierung von Zielmarken.
Bei Tertiärverarbeitung Die von verschiedenen MPRLS-Empfangsgeräten erhaltenen Parameter von Zieltrajektorien werden mit der Identifizierung von Trajektorien kombiniert.
Daher ist die Betrachtung des Wesens aller Arten der Radarinformationsverarbeitung sehr wichtig.
Um unsere Ziele zu erreichen, werden wir folgende Fragen berücksichtigen:
1. Primäre Verarbeitung von Radarinformationen.
2. Sekundärverarbeitung von Radarinformationen.
3. Tertiäre Verarbeitung von Radarinformationen.
Dieses Schulungsmaterial ist in folgenden Quellen zu finden:
1. Bakulev P.A. Radarsysteme: Lehrbuch für Universitäten. - M.:
Funktechnik, 2004.
2. Belotserkovsky G.B. Radar-Grundlagen und Radar
Geräte. – M.: Sowjetisches Radio, 1975.
Primäre Verarbeitung von Radarinformationen
Um Luftfahrtmanagementprozesse zu automatisieren, ist Folgendes erforderlich
umfassende und laufend aktualisierte Informationen zu den Koordinaten und Eigenschaften von Luftzielen. Diese Informationen in automatisierten Kontrollsystemen (ACS) werden mithilfe der im Subsystem zum Sammeln und Verarbeiten von Radarinformationen (RL) enthaltenen Mittel ermittelt, nämlich: Posten und Radarverarbeitungszentren, Flugradarpatrouillen- und Leitkomplexe. Das wichtigste Mittel zur Informationsgewinnung über Luftziele sind Radare. Der Prozess des Erhaltens von Informationen über Objekte, die sich im Sichtbereich des Radars befinden, wird aufgerufen wird bearbeitet RLI.
Diese Verarbeitung ermöglicht es, Daten über die Koordinaten des Ziels, Parameter seiner Flugbahn, Standortzeit usw. zu erhalten. Die Gesamtheit der Informationen über das Ziel wird herkömmlicherweise als bezeichnet markieren. Zusätzlich zu den oben genannten Daten können die Markierungen Informationen über die Zielnummer, ihre Nationalität, Menge, Art, Bedeutung usw. enthalten.
Signale, die für den Bediener notwendige Informationen übertragen, werden als nützlich bezeichnet, sind jedoch in der Regel zwangsläufig Störungen ausgesetzt, die die Informationen verzerren. In diesem Zusammenhang treten im Verarbeitungsprozess Probleme auf, Nutzsignale zu isolieren und unter Störbedingungen die notwendigen Informationen zu erhalten.
Die Informationsverarbeitung basiert auf der Existenz von Unterschieden zwischen Nutzsignal und Störsignal. Der gesamte Prozess der Radarbildverarbeitung lässt sich in drei Hauptphasen unterteilen: Primär-, Sekundär- und Tertiärverarbeitung.
Auf der Bühne Primärverarbeitung Radarbilder erkennen das Ziel und bestimmen seine Koordinaten. Die Primärverarbeitung erfolgt einzeln, häufiger jedoch in mehreren benachbarten Bereichsdurchläufen. Dies reicht aus, um ein Ziel zu erkennen und seine Koordinaten zu bestimmen. Somit ist die primäre Verarbeitung von Radarbildern die Verarbeitung von Informationen für einen Radarüberprüfungszeitraum. Teil Primärverarbeitung Zu den RLI gehören:
Erkennung eines Nutzsignals im Rauschen;
Bestimmung von Zielkoordinaten;
Kodierung von Zielkoordinaten;
Zuweisen von Nummern zu Zielen.
Bis vor Kurzem wurde dieses Problem vom Radarbetreiber gelöst. Derzeit ist ein menschlicher Bediener unter realen Bedingungen der Verfolgung vieler sich mit hoher Geschwindigkeit bewegender Ziele mithilfe von Indikatoren jedoch nicht in der Lage, die Vielfalt der Luftsituation nur mithilfe einer visuellen Methode einzuschätzen. In diesem Zusammenhang stellte sich das Problem, einen Teil oder alle Funktionen eines menschlichen Bedieners bei der Verarbeitung von Radarbildern auf Rechenwerkzeuge zu übertragen, die in automatisierten Kontrolleinrichtungen der Luftfahrt entwickelt wurden.
Primärverarbeitung Radarbildgebung beginnt mit der Erkennung eines Nutzsignals im Rauschen. Dieser Prozess besteht aus mehreren Phasen:
Einzelsignalerkennung;
Burst-Erkennung;
Bildung eines vollständigen Signalpakets;
Bestimmung der Entfernung zum Ziel und seines Azimuts.
Alle diese Schritte werden mit optimalen Algorithmen umgesetzt, die auf den Kriterien minimaler Entscheidungsfehler und Messergebnisse basieren.
Somit können die während der Primärverarbeitung durchgeführten Operationen vom Radar unabhängig durchgeführt werden.
Die Erfindung bezieht sich auf das Gebiet der Verarbeitung von Radarinformationen (RAI) und soll nach vorliegenden Informationen ein allgemeines Bild der Luftsituation erstellen, die sich im Zuständigkeitsbereich des Kontrollpunkts eines Flugabwehrkomplexes entwickelt aus mehreren Radarinformationsquellen. Erreichbar technisches Ergebnis- Erhöhung der Genauigkeit der Radarbilderkennung. Dieses Ergebnis wird dadurch erreicht, dass die Methode der tertiären Verarbeitung von Radarbildern im Computersystem des Kontrollzentrums aus den folgenden Schritten besteht: Empfangen von Nachrichten von Radarquellen; Bringen von Nachrichten zu einem einzigen Zeitpunkt und in ein einziges Koordinatensystem; Identifizierung der von Quellen empfangenen Nachrichten und Erstellung eines allgemeinen Bildes der Luftlage; Erkennung falscher Informationen, wenn Radarbilder von zwei oder mehr Quellen mit denselben technischen Eigenschaften empfangen werden. 2 Abb.
Die Erfindung bezieht sich auf das Gebiet der Verarbeitung von Radarinformationen (RL), und zwar auf die Aufgabe, ein verallgemeinertes Bild der sich im Zuständigkeitsbereich des Kontrollpunkts (CP) eines Flugabwehrkomplexes entwickelnden Luftlage zu erstellen , nach Informationen aus mehreren Radardatenquellen, mit dem Ziel weiterer erfolgreicher Kampfeinsätze.
Die Aufgabe, von verschiedenen Radarbildquellen empfangene Radarmarkierungen als zum selben Ziel gehörend zu identifizieren, ist recht komplex und zeitaufwändig. Die Lösung ist oft unklar und nimmt viel Zeit in Anspruch. In der Praxis werden die Parameter eines Flugobjekts (AO) durch verschiedene Radarbildquellen mit großen statischen Fehlern bestimmt, die durch Fehler in Sendegeräten und Fehler in der Sekundärradarbildverarbeitung verursacht werden, die durch die Art der Quellen bestimmt werden. Informationen aus Quellen, die unter (internen und externen) Störbedingungen arbeiten, enthalten häufig Berichte über falsche Ziele. Die Auswertung und Identifizierung von Nachrichten aus solchen Quellen erfolgt mit großen Fehlern und erfordert oft einen Bedienereingriff. Darüber hinaus können Nachrichten von Quellen, die sich auf beweglichen Stützpunkten befinden, dynamische Fehler enthalten, die sowohl auf eine ungenaue Bestimmung der Luftparameter durch die Radarbildquelle selbst als auch auf Fehler in ihren Stabilisierungs- und Navigationssystemen zurückzuführen sind. Keines von bestehende Methoden kann nicht alle Probleme, die bei der tertiären Verarbeitung von Radarbildern auftreten, vollständig beseitigen.
Es gibt eine bekannte Methode zur tertiären Verarbeitung von Radarbildern aus mehreren voneinander entfernten Quellen (siehe Kuzmin S.Z. „Grundlagen der Theorie der digitalen Verarbeitung von Radarinformationen“, M., „Sowjetisches Radio“, 1974, S. 405). Diese Methode umfasst die folgenden Schritte:
Empfangen von VO-Nachrichten von Radarbildquellen und Übertragen dieser Nachrichten zu einem einzigen Zeitpunkt und in ein einziges Koordinatensystem;
Grobe Identifizierung von Nachrichtenpaaren und Bildung von Gruppen vorselektierter Nachrichten, bei denen die Ergebnisse des paarweisen Vergleichs der entsprechenden Parameter die durch Fehler bei der Schätzung und Extrapolation von Koordinaten ermittelten Werte zulässiger Abweichungen (Identifizierungstore) nicht überschreiten;
Genaue Identifizierung von Nachrichten, die in Gruppen ausgewählt wurden, basierend auf der Mindestsumme der quadrierten Abweichungen in den Koordinaten zwischen empfangenen und verallgemeinerten Nachrichten;
Mittelung der aus mehreren Nachrichten erhaltenen VO-Parameter;
Verarbeitung generalisierter Trajektorien (GT) zum Zweck ihrer Glättung.
Mit dieser Methode ist es nicht möglich, das von modernen Verfahren geforderte Maß an Zuverlässigkeit und Eindeutigkeit des Razu erreichen militärische Ausrüstung. Wenn das Vergleichsergebnis für mindestens ein Parameterpaar zweier Nachrichten um den Wert des Identifikations-Strobe schwankt (manchmal mehr, manchmal weniger), wird die Bildung von einem oder zwei OTs beobachtet (Disidentifikation), dann ein oder zwei Spuren erscheinen im OT-Array (doppelter Trace-Effekt).
Der vorgeschlagenen technischen Lösung am nächsten kommt die Methode der Verarbeitung von Radarbildern in einer Netzwerkinformationsstruktur automatisiertes System Steuerung (RF-Patent Nr. 2461843). Diese Methode geht davon aus:
Empfangen von Nachrichten von Quellen und Auswählen von Nachrichten mit dem Attribut „Neues Ziel“;
Ausgewählte Nachrichten an einen einzigen Bezugspunkt bringen;
Vorläufige Auswahl aus anderen Nachrichtenquellen, die mit neu empfangenen Nachrichten identifiziert werden können, nach dem Kriterium des Maximums mögliche Geschwindigkeit VO und quadratischer Mittelfehler der Koordinatenmessung durch Radarbildquelle;
Vorläufige Bildung von Nachrichtenpaaren;
Paarweise Bewertung von Nachrichten zur möglichen Identifizierung und Bildung einer VO-Matrix;
Auswahl und Übermittlung von Informationen aus der VO-Matrix nach Verbraucherwünschen.
Die Autoren dieser Methode schlagen vor, einige der Funktionen zur Verarbeitung von Radarbildern auf den Server der Netzwerkinformationsstruktur zu übertragen, was den Zeitaufwand für die Verarbeitung von Radarbildern reduziert, jedoch nicht die Genauigkeit der Radarbildverarbeitung erhöht und eine Verdoppelung nicht verhindert Spuren im OT-Array.
Glättender Einfluss statische Fehler Sekundärverarbeitung von Radarbildern und Informationsübertragung;
Verringerung des Effekts der Geisterbilder von Spuren an den Grenzen von Identifikationstoren;
Reduzierung des Einflusses falscher Informationen in Nachrichten von Quellen, die unter Störbedingungen arbeiten.
Das Problem wird dadurch gelöst, dass in der vorgeschlagenen Methode der tertiären Verarbeitung von Radarbildern in einem Computersystem (CS) PU Folgendes umfasst:
Empfang von VO-Nachrichten von Radarquellen;
Empfangene Nachrichten zu einem einzigen Zeitpunkt und in ein einziges Koordinatensystem bringen;
Identifizierung der von Quellen empfangenen Nachrichten, um ein allgemeines Bild der Luftsituation zu erstellen und an die Verbraucher weiterzuleiten;
Neu ist Folgendes:
Die Entscheidung zur Identifizierung von Nachrichten wird getroffen, wenn die Identifizierungstore die Werte der Standardabweichungen der Koordinatenkomponenten der Nachricht entlang der VO von der Quelle und der kombinierten Flugbahn über mehrere Austauschzyklen treffen;
Nachrichten werden nicht identifiziert, wenn der Wert der Standardabweichung in mindestens einer der Koordinaten einen Wert überschreitet, der dem Gesamtwert des Identifikationsblitzes und der Mehrdeutigkeitszone entspricht, deren Wert durch die dynamischen Fehler der Stabilisierungs- und Navigationssysteme bestimmt wird der Radarquelle;
Es ist möglich, falsche Informationen zu erkennen, wenn Radarbilder von zwei oder mehr Quellen mit denselben technischen Eigenschaften empfangen werden, indem die Möglichkeit analysiert wird, dass ein neues VO in die Sichtbarkeitszonen anderer Quellen fällt, wenn eine Nachricht über ein neues VO von einer dieser Quellen empfangen wird die Quellen und Festlegung der Wartezeit für den Erhalt von Informationen zu dieser VO aus anderen Quellen. Wenn während der Wartezeit keine Informationen aus anderen Quellen eingetroffen sind und keine Informationen zu dieser VO aus der ersten Quelle eingegangen sind, wird eine Schlussfolgerung gezogen dass die Informationen zu dieser VO in den Nachrichten der ersten Quelle falsch sind.
Bei dem vorgeschlagenen Verfahren wird die Glättung von Fehlern bei der Verarbeitung und Übertragung von Radarbildern durch die Verwendung von Informationen über das VO über mehrere Austauschzyklen hinweg erreicht. Um eine Identifizierungsentscheidung zu treffen, werden die Standardabweichungen (RMSD) zwischen den entsprechenden Koordinaten des VO in den Quell- und OT-Nachrichten für n Austauschzyklen berechnet:
wobei U kj die Koordinate des VO in der Quellnachricht gemäß ist jtes Ziel in der Nummerierung der erhaltenen Quelle k-ter Zyklus Austausch,
U k – OT-Koordinate extrapoliert auf dieser Moment Zeit,
N- Konstante und hängt vom Zeitraum der Aktualisierung der Informationen zu VO ab.
Wenn Sie zum ersten Mal am Informationssammelpunkt einer Quelle für das j-te Ziel ankommen, erfolgt die Identifizierung mit dem OT, wenn die folgenden Bedingungen für alle Koordinaten erfüllt sind:
wobei ΔU der Wert des Identifikationsstrobe ist.
Um dem Ghosting-Effekt entgegenzuwirken, wurden Mehrdeutigkeitszonen für Identifikationstore eingeführt. Beim erneuten Empfang von Informationen zum j-ten Ziel werden folgende Bedingungen überprüft:
wobei δU die Größe der Mehrdeutigkeitszone ist.
Die Größe der Mehrdeutigkeitszone wird durch die Größe des dynamischen Fehlers der Stabilisierungs- und Navigationssysteme der Radarbildquelle bestimmt. Wenn Bedingung (3) für mindestens eine der Koordinatenkomponenten der Nachricht nicht erfüllt ist, wird das OT nicht identifiziert. Die Einführung einer Mehrdeutigkeitszone in Bedingung (3) ermöglicht es, die Häufigkeit von Identifizierungen/Fehlidentifizierungen von Radarbildern zu reduzieren, die von Quellen stammen, die mit dynamischen Fehlern arbeiten.
Beim Erhalt von Informationen aus zwei oder mehr Quellen mit gleichen technischen Merkmalen können Falschinformationen erkannt werden. Wenn eine Nachricht zu einem neuen VO von einer der Quellen empfangen wird und die Analyse der Sichtbarkeitszonen der Quellen die Möglichkeit ergeben hat, Informationen zu diesem VO von anderen Quellen zu empfangen, wird die Wartezeit t für diese Nachricht bis zum eingestellt Erhalt von Informationen aus anderen Quellen. Die Kühlung hängt vom Gefährdungsgrad des HE ab. Aus diesen Nachrichten wird ein Array von Nachrichten gebildet, die auf die Verarbeitung warten (MO). Wenn im Zeitraum tож keine Informationen aus anderen Quellen eingegangen sind und Informationen zu dieser VO aus der ersten Quelle nicht mehr eingetroffen sind, wird der Schluss gezogen, dass die Informationen zu dieser VO in den Nachrichten der ersten Quelle falsch sind. Somit gelangen keine falschen Informationen in das OT-Array.
In Abb. In Abb. 1 zeigt ein Diagramm der Implementierung der vorgeschlagenen Methode, wobei:
1 – einheitlicher Datenraum (UDS);
2 – Radarbildquelle (IST);
3, 13 - Kommunikationsmittel (CPS);
4 - Falschinformationsdetektor (FID);
5 – Nachrichtenvorverarbeitungsblock (BPO);
6 - Analysator der Möglichkeit der Identifizierung mit bestehenden kombinierten Flugbahnen (ABO);
7 – Disidentifikationsmöglichkeitsanalysator (ADP);
8 - Que(CVA);
9 - Block zur Berechnung der Wartezeit und Aufnahme in MO (BRVO);
10 - Verifizierungseinheit gemäß MO (BP);
11 - Prüfungseinheit MO (BR);
12 – OT-Array-Tracking-Einheit (BS);
14 - RLI-Verbraucher (POT).
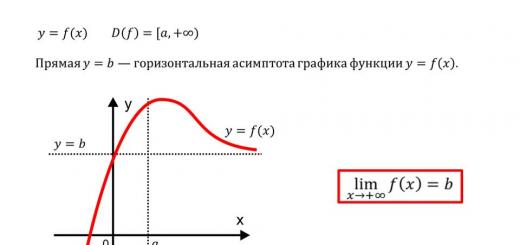
In Abb. Abbildung 2 zeigt ein Diagramm, das die Verwendung von Mehrdeutigkeitszonen bei der Identifizierung von Radarbildern erläutert, wobei N die Anzahl der OT und σ die Standardabweichung gemäß Ausdruck (1) ist.
Diese Methode der tertiären Verarbeitung von Radarbildern kann auf Basis eines Einprozessor-Computersteuerungssystems implementiert werden und besteht aus den Phasen Empfang von Nachrichten, Verarbeitung und Übermittlung von Informationen an Verbraucher. Gemäß FIG. 1 kann die vorgeschlagene Methode bedingt in separate Aufgaben unterteilt werden, die nacheinander in den Blöcken 5-12 gelöst werden. Jede Aufgabe verwendet ihren eigenen lokalen Adressraum. Über OPD 1 besteht eine Informationsverbindung zwischen Tasks. Als OPD wird der RAM CS PU verwendet.
Bei jedem Austauschzyklus gelangt das Radarbild von IST 2 bis SRS 3 in BPO 5, wo die von der Quelle empfangene Nachricht zu einem einzigen Zeitpunkt und einem einzigen Koordinatensystem gebracht wird. Als SRS werden in der CS PU ein Multiplex Information Exchange Channel (MCIC) und ein Ethernet-Kanal verwendet.
Um eine Entscheidung über die Identifizierung von Radarbildern zu treffen, werden gemittelte Informationen über n Zyklen des Datenaustauschs mit der Quelle verwendet. Die gegebenen Nachrichten für alle VOs, die über n Austauschzyklen von der Radarbildquelle zum Informationssammelpunkt empfangen werden, werden in Form eines Arrays mit Dimensionen n×i×j aufgezeichnet, dessen Spalten einen Satz von i Parametern für darstellen das j-te Ziel in der Quellennummerierung, das bei jedem der n Austauschzyklen empfangen wird. Arrays von Quellnachrichten werden in OPD 1 gespeichert. Außerdem gibt es in OPD 1 ein Array von OT und MO. In jedem Zyklus werden Nachrichten nur von einer Quelle verarbeitet. In ABO 6 werden Meldungen über neue VOs in der Quellennummerierung anhand von Koordinaten auf die Möglichkeit einer Identifizierung mit bestehenden OTs gemäß Bedingungen (2) überprüft. Wenn die Bedingungen (2) für ein bestimmtes OT erfüllt sind, wird das Attribut, dass die VO von einer Quelle begleitet wird, in OPD 1 festgelegt. Nachrichten, die die Bedingungen (2) nicht erfüllen, bilden ein neues OT in OPD 1.
In AVR 7 erfolgt eine Desidentifizierung, wenn Bedingung (3) für mindestens eine der Koordinaten nicht erfüllt ist. Der Wert von δU in Bedingung (3) ermöglicht es, den Effekt von Spurengeisterbildern zu kompensieren. Der Prozess der Identifizierung und Desidentifizierung mit abnehmendem bzw. zunehmendem Wert der Standardabweichung σ wird durch die Grafik in Abb. erläutert. 2. Die Übergangsprozesse von einem OT zu zwei und zurück verlaufen entsprechend an verschiedene Parteien Rechteck 15, das durch die Zone der Mehrdeutigkeit gebildet wird.
Wenn zwei oder mehr Quellen mit denselben technischen Merkmalen vorhanden sind, wird in OLI 4 der Prozess der Filterung falscher Informationen gestartet. Wenn Informationen über die VO von einer dieser Quellen empfangen werden, prüft CBA 8 die Möglichkeit, Informationen über diese VO von dieser Quelle zu erhalten andere Quellen unter Berücksichtigung der Sichtbarkeitszone. Ist das Testergebnis im BRVO 9 positiv, wird je nach Gefährdungsgrad des VO t cool berechnet und eine Meldung im MO erfasst. Wenn Informationen von einer anderen Quelle eintreffen, überprüft der BP 10 das MO auf die Möglichkeit, eine der im MO gespeicherten Nachrichten mit der neu empfangenen zu identifizieren. Wenn eine solche Nachricht gefunden wird, werden die beiden Nachrichten identifiziert und ein neuer OT zum OT-Array hinzugefügt. Wenn eine solche Nachricht nicht von einer anderen Quelle empfangen wurde, führt BR 11 eine ständige Prüfung der MO-Nachrichten auf den Ablauf von t cool durch. Wenn die Zeit t cool abgelaufen ist und keine Informationen zu diesem VO aus der ersten Quelle mehr eintreffen, wird diese Nachricht als falsch betrachtet und aus dem MR gelöscht und es wird kein neues OT generiert. Wenn weiterhin Informationen zu dieser VO aus der ersten Quelle eintreffen, wird ein neues OT gebildet.
BS 12 führt eine ständige Überwachung des OT-Arrays durch. Wenn während der Zeit t Quelle (t Quelle hängt von der Art der Quelle und vom Austauschzyklus mit der Quelle ab) von keiner der sie begleitenden Quellen Informationen zu einem bestimmten OT empfangen werden, wird das OT unbegleitet und aus dem OT-Array gelöscht .
Daten vom OT-Array werden über SRS 13 an POT 14 für weitere Kampfeinsätze in der Luftverteidigung übertragen.
Das beanspruchte Verfahren zur tertiären Verarbeitung von Radarinformationen im PU-Flugzeug ermöglicht es, den Effekt von Doppelpfaden zu beseitigen und Nachrichten von Quellen mit zu identifizieren und zu desidentifizieren hochgradig Zuverlässigkeit, reduzieren den Einfluss falscher Informationen aus Quellen, minimieren Fälle von Bedienereingriffen in den Verarbeitungsprozess selbst und können sowohl in den Flugzeugwerfern von Flugabwehrkomplexen als auch in den Flugzeugen der Flugabwehrkomplexe selbst implementiert werden, die als solche arbeiten Teil einer Gruppe.
Eine Methode zur tertiären Verarbeitung von Radarinformationen im Computersystem eines Kontrollpunkts, einschließlich des Empfangs von Nachrichten über Flugobjekte (AO) von Radarinformationsquellen (RAI), wodurch diese Nachrichten zu einem einzigen Zeitpunkt und in ein einziges Koordinatensystem gebracht werden , Identifizieren von Nachrichten, die von Quellen empfangen werden, um ein verallgemeinertes Bild der Luftsituation zu erstellen und es an Verbraucher zu übermitteln, dadurch gekennzeichnet, dass die Entscheidung zur Identifizierung von Nachrichten getroffen wird, wenn die Werte der Standardabweichungen der Koordinatenkomponenten der Nachricht entlang der Wenn die Luftquelle und die kombinierte Flugbahn über mehrere Austauschzyklen hinweg in die Identifizierungstore von der Quelle und der kombinierten Flugbahn fallen, werden Nachrichten deidentifiziert, wenn der Wert der Standardabweichung entlang mindestens einer der Koordinaten einen Wert überschreitet, der dem Gesamtwert entspricht Wert des Identifikationsblitzes und der Mehrdeutigkeitszone, deren Wert durch die dynamischen Fehler der Stabilisierungs- und Navigationssysteme der Radarbildquelle bestimmt wird, mit der Fähigkeit, falsche Informationen zu erkennen, wenn Radarbilder von zwei oder mehr Quellen empfangen werden dieselben technischen Merkmale, indem bei Erhalt einer neuen VO von einer der Quellen eine Nachricht gesendet wird, die Möglichkeit analysiert wird, dass eine neue VO in die Sichtbarkeitszonen anderer Quellen gerät, und eine Wartezeit festgelegt wird, bis Informationen zu dieser VO von anderen Quellen eintreffen Quellen: Wenn während der Wartezeit keine Informationen aus anderen Quellen eingetroffen sind und Informationen zu dieser VO nicht mehr von der ersten Quelle stammen, kommen sie zu dem Schluss, dass die Informationen zu dieser VO in den Nachrichten der ersten Quelle falsch sind.
Ähnliche Patente:
Die Erfindungsgruppe bezieht sich auf Flugzeuglandesysteme und kann bei der Umsetzung von Flugplatzunterstützungskomplexen eingesetzt werden. Das erreichte technische Ergebnis ist die Erweiterung des Gerätespektrums zur Landung von Flugzeugen auf dem Flugplatz, was durch den Einsatz eines Radars erreicht wird, das Folgendes enthält: vier Antennen (PAA), zehn Signalgeneratoren, zwölf Mischer und Filter, vier Leistungsverstärker und Frequenz Zähler, fünf DACs, ein Koeffizientenrechner und zwei Schaltkreise für Multiplikation und Subtraktion.
Die Erfindung ist für den Einsatz im Bereich des Luftfahrtinstrumentenbaus, insbesondere bei Flugnavigationsgeräten, vorgesehen Flugzeug(LA). Das technische Ergebnis ist eine Erhöhung der Zuverlässigkeit und Sicherheit bei der Landung eines Flugzeugs sowie eine Erhöhung der Genauigkeit bei der Bildung einer bestimmten Landebahn.
Die Erfindung betrifft eine Vorrichtung (10) zur Erkennung eines Fahrzeugs, insbesondere eines Flugzeugs (A), auf der Landebahn (R) eines Flughafens, insbesondere auf einer Landebahn, Rollbahn oder einem Flugzeugparkplatz, wobei diese Vorrichtung (10) enthält mindestens einen Radarsensor (11), der im Bereich des Streifens (R) installiert und zum Aussenden eines Radarstrahls zur Abtastung der räumlichen Erfassungszone (E) konfiguriert ist.
Die Erfindung bezieht sich auf Radar und kann in automatisierten Steuerungssystemen verwendet werden, die auf den Prinzipien einer Netzwerkinformationsstruktur aufgebaut sind, im Hinblick auf die Verarbeitung von Radarinformationen (RL) von Quellen – Radarstationen (RLS) und deren Übertragung an Verbraucher – Flugabwehrraketen Systeme und Systeme.
Die Erfindung bezieht sich auf das Gebiet der Flugzeugnavigation und kann bei der Landung eines Flugzeugs eingesetzt werden. .
Die Erfindung betrifft Systeme zur Erkennung, Verfolgung und Verteilung von Luftzielen in boden- und/oder seegestützten Radarsystemen und kann in Luftverteidigungssystemen zum Schutz von Bodenzielen vor Luftangriffen eingesetzt werden.
Die Erfindung bezieht sich auf das Gebiet der Messtechnik und kann zur Bestimmung geringer Flughöhen eines Flugzeugs eingesetzt werden. Das erreichte technische Ergebnis ist eine Erweiterung des Bereichs der gemessenen Höhen des Flugzeugs. Dieses Ergebnis wird durch die Einführung eines RS-Triggers in den Höhenmesser und in jedem Schrägentfernungsmessblock einer zweiten Taste erreicht, wobei der Ausgang mit dem Steuereingang eines lichtempfindlichen Geräts mit Ladungskopplung des Schrägentfernungsmessblocks verbunden ist und der Informationseingang des Die zweite Taste dient als erster Eingang des Neigungsentfernungsmessblocks, der zweite Eingang ist der Steuereingang der Taste, der dritte Eingang des Neigungsentfernungsmessblocks ist der Eingang der gesteuerten Stromversorgung und der Der zweite Ausgang jedes Schrägentfernungsmessblocks ist der Ausgang des Impulszählers, und der R-Eingang des RS-Triggers ist mit dem zweiten Ausgang des ersten Schrägentfernungsmessblocks verbunden. Der S-Eingang des RS-Triggers ist mit dem verbunden zweiter Ausgang des zweiten Schrägentfernungsmessblocks, dessen dritter Eingang parallel zum R-Ausgang des RS-Triggers geschaltet ist, mit dem zweiten Eingang des ersten Schrägentfernungsmessblocks, dessen dritter Eingang parallel zum R-Ausgang des RS-Triggers geschaltet ist S-Eingang des RS-Triggers mit dem zweiten Eingang des zweiten Neigungsmessblockbereichs. 2 Abb.
Die Erfindung betrifft ein Verfahren und eine Vorrichtung zur Erkennung eines rotierenden Rades eines Fahrzeugs, das sich in Fahrtrichtung auf einer Fahrbahn bewegt und dessen Räder seitlich zumindest teilweise offen sind. Das technische Ergebnis besteht darin, die Zuverlässigkeit der Erkennung eines rotierenden Fahrzeugrades zu erhöhen. Es wird ein Verfahren zur Erkennung eines rotierenden Rades (4) eines Fahrzeugs (1) vorgeschlagen, das sich entlang der Fahrbahn (2) in Fahrtrichtung (3) bewegt und dessen Räder (4) zumindest teilweise offen auf der Fahrbahn (2) stehen Seite, einschließlich der Schritte: Senden eines elektromagnetischen Messstrahls (9) mit einem bekannten zeitlichen Verlauf seiner Frequenz in den ersten Bereich über der Fahrbahn (2) in der Richtung schräg zur Vertikalen (V) und senkrecht oder schräg zur Richtung der Bewegung (3), Empfangen des reflektierten Messstrahls (9) und Aufzeichnen des zeitlichen Verlaufs seiner Frequenzen in Bezug auf eine bekannte Charakteristik als Charakteristik (20) einer Mischung empfangener Frequenzen und Erfassen eines kontinuierlich zunehmenden Frequenzbandes (22). oder über einen Zeitraum abnehmend in der Charakteristik (20) einer Mischung empfangener Frequenzen als Rad (4) ist. 2 n. und 13 Gehalt f-ly, 9 Abb.
Die Erfindung betrifft ein Verfahren und eine Vorrichtung zur Erkennung eines sich drehenden Rades eines Fahrzeugs, das sich in Fahrtrichtung auf einer Fahrbahn bewegt und dessen Räder seitlich zumindest teilweise offen sind. Das technische Ergebnis besteht darin, die Zuverlässigkeit der Erkennung eines rotierenden Fahrzeugrades zu erhöhen. Es wird ein Verfahren zur Erkennung der Räder (4) eines Fahrzeugs (1) vorgeschlagen, das sich entlang der Straße (2) in Bewegungsrichtung (3) bewegt und dessen Räder (4) zumindest teilweise seitlich offen sind, einschließlich: Aussenden elektromagnetischer Strahlung aus dem Blütenblatt (15) Richtungsmuster des Messstrahls mit bekannter zeitlicher Frequenzcharakteristik vom Bereich am Straßenrand (2) zum Bereich der Straße (2) und mit einem Neigung relativ zur Bewegungsrichtung (3); Empfangen einer Keule (15) des Richtungsmusters des von einem vorbeifahrenden Fahrzeug (1) reflektierten Messstrahls und Aufzeichnen des zeitlichen Verlaufs (F) aller Frequenzen der reflektierten Strahlung relativ zu dem vorgegebenen bekannten Verlauf; und Erfassen einer Frequenz in der aufgezeichneten Charakteristik (F), die während der Durchfahrt (Tr) des Fahrzeugs auftritt, als sich verbreiterndes Rad (A2), wobei die Verbreiterung größer als ein vorbestimmter Verbreiterungsbetrag (S) ist. 2 n. und 2 Gehalt f-ly, 9 Abb.
Die Erfindung bezieht sich auf das Gebiet der Radartechnik und kann beim Aufbau von Radarreliefmetriksystemen zur Standortbestimmung von Flugzeugen mithilfe von Funkwellen eingesetzt werden. Das mit der Erfindung erzielte technische Ergebnis besteht darin, die Geheimhaltung und Geschwindigkeit der Navigationsmethode von Flugzeugen sowie die Genauigkeit der Standortbestimmung des Flugzeugs beim Überqueren einer Messstrecke zu erhöhen. Bei einem Verfahren zur autonomen Navigation eines Flugzeugs, einschließlich der Bestimmung der Neigungsreichweite des Flugzeugs bis zu Erdoberfläche, das darin besteht, Funkwellen in Form mehrerer Strahlen auszusenden und anschließend entlang dieser Strahlen reflektierte Funkwellen zu empfangen, wobei Funkwellen gleichzeitig mit derselben Trägerfrequenz in Form von Folgen von Funkimpulsen ausgesendet werden, Anfangsphasen die durch zueinander orthogonale M-Sequenzen moduliert werden. Die reflektierten Funkwellen werden in Strahlen aufgeteilt und die Schrägabstände des Flugzeugs zur Erdoberfläche werden durch ein Korrelationsverfahren unter Verwendung modulierender M-Sequenzen als Unterstützungsfunktionen oder durch ein angepasstes Filterverfahren unter Verwendung von Codes, die die modulierenden M-Sequenzen als Gewichtungskoeffizienten bilden, bestimmt . 10 Abb.
Die Erfindung betrifft Steuerungssysteme. Die Methode zum Erzeugen eines Steuersignals zum Verfolgen eines Ziels besteht darin, dass das Steuersignal gemäß dem Gesetz generiert wird, das auf dynamischen Matrizen interner Verbindungen von Systemen, einem verallgemeinerten Vektor des Systemzustands und einem Vektor von Steuersignalen basiert. Das Steuersignal besteht aus einer gewichteten Summe von Phasenkoordinaten und deren Ableitungen, die im Steuersignal mit proportionalen Koeffizienten enthalten sind, abhängig von der Diskrepanz zwischen den dynamischen Eigenschaften der dynamischen Matrizen der internen Verbindungen der Systeme. Das Steuersignalerzeugungssystem für einen Trägheitspeiler umfasst ein Messgerät, einen Filter, einen Verstärker, einen Addierer und ein Steuerelement. Darüber hinaus wurden Verstärker mit Koeffizienten abhängig von der Matrixdifferenz und Filter für hohe Ableitungen der verfolgten Koordinaten eingeführt. Die abgeleiteten Nichtübereinstimmungswerte werden in den Addierer eingegeben. Die Systemeffizienzindikatoren werden verbessert. 2 n.p. f-ly, 6 Abb.
Die Erfindung betrifft ein Verfahren zur Erkennung eines rotierenden Rades eines Fahrzeugs. Es wird ein Verfahren zur Erkennung eines rotierenden Rades (1) eines Fahrzeugs (2) vorgeschlagen, dadurch gekennzeichnet, dass die Erkennung des Rades (1) durch Schätzung der vom Rad (1) reflektierten Dopplerfrequenzverschiebung und des zurückgesandten Messstrahls (6) erfolgt mit der Doppler-Verschiebung, die von der Detektoreinheit (5) ausgesendet wird Fahrzeug(2). In einer relativen Position (R) relativ zum Rad (1) enthält das Fahrzeug (2) ein Bordgerät (15), das in der Lage ist, eine Funkkommunikation (23) mit einem an einer bekannten Position installierten Transceiver (24) herzustellen ( L) in der Detektoreinheit. Das Verfahren umfasst: Messen der Richtung (δ) und des Abstands (z) zum Bordgerät (15) vom Transceiver (24) über Funkkommunikation (23) zwischen den angegebenen Geräten und Steuern der Strahlungsrichtung (δ, β). , γ) oder Position (A) des Messstrahlungsbündels (6) entsprechend der gemessenen Richtung (δ) und Entfernung (z) und unter Berücksichtigung der oben genannten relativen Position (R) und Position (L). Die relative Position (R) wird in der On-Board-Unit (15) gespeichert und über Funkkommunikation (23) aus der On-Board-Unit (15) zur Berücksichtigung bei der oben genannten Steuerung ausgelesen. Erreicht wurde die Schaffung einer verbesserten Methode zur Raderkennung auf Basis von Doppler-Messungen. 14 Gehalt F-ly, 4 Abb., 1 Tisch.
Die Erfindung bezieht sich auf Radar und kann in automatisierten Steuerungssystemen verwendet werden, die auf den Prinzipien einer Netzwerkinformationsstruktur aufbauen, im Hinblick auf die Übertragung und den Austausch von Radarinformationen (RAI), in einem automatisierten System zur Verarbeitung und zum Austausch von Radarinformationen (ASOO). RLI). Das erzielte technische Ergebnis besteht in einer Verkürzung der Zeit, die Radarinformationen für die Durchleitung des Systemnetzwerks benötigen, indem irrelevante, beschädigte und unerwünschte Informationen entfernt werden, die Übertragung wiederholter Informationen eliminiert wird, die Informationsqualitätsindikatoren verbessert und die Anforderungen gesenkt werden für Bandbreite Kommunikationsleitungen aufgrund der höheren Geschwindigkeit der Radarbildverarbeitung auf Servern. Die angegebenen technischen Ergebnisse werden dadurch erreicht, dass Radarinformationsquellen alle Radarinformationen bei ihrem Eintreffen über Telecode-Informationsgateways an Server weiterleiten, Server eingehende Radarinformationen verarbeiten und Verbraucher Radarinformationen auf Anfrage erhalten, nachdem sie den Servern zuvor mitgeteilt haben, welche Informationen sie benötigen Wenn die angeforderten Informationen nicht verfügbar sind, empfangen die Server sie aus dem Computernetzwerk von anderen Servern und verteilen sie an Verbraucher, während die Daten zunächst weitergeleitet und nach den Kriterien Netzwerklebensdauer und Quelladresse gefiltert werden welche zusätzlichen Filter- und Radarbild-Routing-Algorithmen implementiert sind. Dabei werden Netzwerkknoten zu einem virtuellen Peer-to-Peer-Netzwerk zusammengefasst. 1 Abb.
Die Erfindung bezieht sich auf das Gebiet der Verarbeitung von Radarinformationen und soll ein allgemeines Bild der Luftsituation erstellen, die sich im Zuständigkeitsbereich des Kontrollpunkts eines Flugabwehrkomplexes gemäß den Informationen mehrerer Radargeräte entwickelt Bildquellen. Das erzielte technische Ergebnis besteht darin, die Genauigkeit der Radarbilderkennung zu erhöhen. Dieses Ergebnis wird dadurch erreicht, dass die Methode der tertiären Verarbeitung von Radarbildern im Computersystem des Kontrollzentrums aus den folgenden Schritten besteht: Empfangen von Nachrichten von Radarquellen; Bringen von Nachrichten zu einem einzigen Zeitpunkt und in ein einziges Koordinatensystem; Identifizierung der von Quellen empfangenen Nachrichten und Erstellung eines allgemeinen Bildes der Luftlage; Erkennung falscher Informationen, wenn Radarbilder von zwei oder mehr Quellen mit denselben technischen Eigenschaften empfangen werden. 2 Abb.
Verarbeitung von Radarinformationen- der Prozess, die vom Radar empfangenen Informationen in eine für die weitere Übertragung geeignete Form zu bringen.
Die Verarbeitung der Radarinformationen erfolgte zunächst durch den Radarbetreiber, der die Luftlage auf dem Bildschirm des Rundumanzeigers (PVI) beobachtete. Im einfachsten Fall wurden Informationen vom Ausgang des Radarempfangsgeräts auf dem ICO angezeigt, und der Leuchtstoff des ICO (bei dem es sich um eine Kathodenstrahlröhre mit Radial-Circular-Scan, RCR) handelte, führte die Integration der Radarinformationen durch . Mit der Entwicklung von Computertools wurde es möglich, die Funktion der halbautomatischen Verfolgung (halbautomatisch) und anschließend der automatischen Erfassung (automatisch) hinzuzufügen. Bei einer halbautomatischen Maschine legte der Bediener manuell die Zielroute fest und dann verarbeitete die Maschine die Informationen selbstständig und nur bei Bedarf und bat den Bediener um Hilfe. Im Automaten führt die Maschine selbstständig nicht nur die Verfolgung, sondern auch das Einrichten von Routen durch. Die Fähigkeiten von Computertools erlauben es uns jedoch nicht, den Operator vollständig aufzugeben – in einer komplexen Rauschumgebung reduzieren bestehende Algorithmen ihre Leistung erheblich bis zur Inoperabilität.
Primärverarbeitung
Verarbeitung eines Echosignals (bei aktiven Radargeräten mit passiver Antwort) oder einer aktiven Antwort (bei aktiven Anfrage-Antwort-Systemen, SAZO, Freund-Feind-Identifikation) zur Isolierung nützliche Informationen vor dem Hintergrund natürlicher und künstlicher Eingriffe
Eingang: Signal vom Empfänger, Antennen-Feeder-System (AFS)-Radar.
Ausgabe: Position der Ziele, deren Winkelgröße, Azimut und Entfernung.
Ausgeführt: durch ein primäres Verarbeitungsgerät (PDU), das sich im Radar befindet;
Sekundärverarbeitung
Entwickelt, um Zielspuren basierend auf Daten des UPO zu generieren. Basierend auf den primären Verarbeitungsdaten wird die Position der Ziele extrapoliert – deren Kurs, Geschwindigkeit und Höhe bestimmt und die Position des Ziels im nächsten Überprüfungszeitraum vorhergesagt. Im Prozess der Sekundärverarbeitung erhöht sich die Stabilität der Zielverfolgung (das Ziel wird für mehrere Betrachtungszeiträume nach dem Verschwinden des Ziels extrapoliert, was die Verfolgung von Zielen mit einer instabilen Markierung ermöglicht. Außerdem werden falsche Ziele und Verfolgungen verworfen. Zunächst bei Zum Zeitpunkt des Erscheinens wurde die Sekundärverarbeitung mithilfe von Komplexen von Automatisierungswerkzeugen für ein automatisiertes Kontrollsystem ( KSA ACS) durchgeführt. Moderne Radargeräte führen diese Verarbeitung selbstständig durch und bei Bedarf kann die Verarbeitung auf Befehl ihres Bedieners an die KSA übertragen werden .
Eingabe: durch Primärverarbeitung erhaltene Ziele.
Ausgabe: Zielnummern, Koordinaten, Geschwindigkeit, Kurs, Höhe sowie weitere Radarmerkmale. Die Ergebnisse der Sekundärverarbeitung eignen sich zur Weitergabe von Informationen an Verbraucher (Flugabwehrraketenkräfte und Kampfflugzeuge) und werden auch zur Steuerung anderer Radargeräte, beispielsweise eines Funkhöhenmessers, verwendet.
Durchgeführt: manuell durch einen Supportmitarbeiter; KSA ASU oder PORI – ein halb- und automatischer Rad(auf Radarunternehmensebene).
Tertiäre Verarbeitung
Die Essenz: Vergleich von Informationen aus mehreren Quellen.
Eingabe: Zielspuren, die als Ergebnis einer Sekundärverarbeitung aus verschiedenen Radarquellen erhalten wurden, Koordinaten von Radarquellen und deren Eigenschaften.
Mit mathematischen Methoden werden Informationen verdeutlicht und ergänzt, die Vollständigkeit der Daten und die Stabilität der Zielverfolgung erhöht und die Arbeit einer Gruppe von Radargeräten optimiert, um Radarbilder maximaler Qualität bei minimalem Ressourcenverbrauch zu erhalten unter Berücksichtigung der Situation und der eingesetzten Mittel. Ausgabe: Zielspuren unter Berücksichtigung der Übertragung eines Ziels von einem Radar auf ein anderes, der Genauigkeit verschiedener Quellen usw.
Durchgeführt: auf der Ebene des technischen Funkbataillons und höher; manuell, halbautomatisch oder automatisch durch einen ACS-Offizier der Kampfkontrollgruppe oder auf seinen Befehl durch einen Bediener.
Schreiben Sie eine Rezension zum Artikel „Verarbeitung von Radarinformationen“
Ein Auszug, der die Verarbeitung von Radarinformationen charakterisiert
Er kannte niemanden, und trotz seiner schicken Guards-Uniform alle diese überlegene Leute, die in schicken Kutschen, Federbuschen, Bändern und Orden, Höflingen und Militärs durch die Straßen huschten, schienen so unermesslich über ihm, einem Gardeoffizier, zu stehen, dass sie seine Existenz nicht nur nicht erkennen wollten, sondern auch nicht erkennen konnten. In den Räumlichkeiten des Oberbefehlshabers Kutusow, wo er Bolkonski befragte, sahen ihn all diese Adjutanten und sogar Pfleger an, als wollten sie ihn davon überzeugen, dass es hier viele Offiziere wie ihn gab und dass sie alle sehr freundlich waren Ich habe sie satt. Trotzdem oder besser gesagt als Folge davon ging er am nächsten Tag, dem 15., nach dem Mittagessen erneut nach Olmutz, betrat das von Kutusow bewohnte Haus und fragte Bolkonski. Prinz Andrei war zu Hause und Boris wurde in einen großen Saal geführt, in dem sie wahrscheinlich schon einmal getanzt hatten, aber jetzt gab es fünf Betten und verschiedene Möbel: einen Tisch, Stühle und ein Clavichord. Ein Adjutant, näher an der Tür, in einem persischen Gewand, saß am Tisch und schrieb. Der andere, der rote, dicke Nesvitsky, lag auf dem Bett, die Hände unter dem Kopf, und lachte mit dem Offizier, der sich neben ihn setzte. Der Dritte spielte den Wiener Walzer auf dem Clavichord, der Vierte lag auf dem Clavichord und sang mit. Bolkonsky war nicht da. Keiner dieser Herren änderte seine Position, nachdem er Boris bemerkt hatte. Derjenige, der schrieb und an den Boris sich wandte, drehte sich verärgert um und sagte ihm, dass Bolkonsky im Dienst sei und dass er durch die Tür nach links in den Empfangsraum gehen solle, wenn er ihn sehen müsse. Boris dankte ihm und ging zum Empfangsbereich. Im Empfangsraum befanden sich etwa zehn Offiziere und Generäle.Während Boris heraufkam, hörte Fürst Andrei mit verächtlich zusammengekniffenen Augen (mit jenem besonderen Blick höflicher Müdigkeit, der klar zum Ausdruck bringt, dass ich nicht eine Minute mit Ihnen reden würde, wenn es nicht meine Pflicht gewesen wäre) dem alten russischen General zu Befehlshaber, der, fast auf Zehenspitzen, stramm, mit dem unterwürfigen Ausdruck eines Soldaten auf seinem lila Gesicht, Prinz Andrei etwas berichtete.
„Sehr gut, wenn Sie bitte warten“, sagte er mit dem französischen Akzent auf Russisch zum General, den er benutzte, wenn er verächtlich sprechen wollte, und als er Boris bemerkte, wandte er sich nicht mehr an den General (der ihm flehend hinterherlief und fragte). er solle ihm etwas anderes zuhören), Prinz Andrej wandte sich mit einem fröhlichen Lächeln, ihm zunickend, an Boris.
Boris verstand in diesem Moment bereits klar, was er zuvor vorhergesehen hatte, nämlich dass es in der Armee neben der Unterordnung und Disziplin, die im Reglement stand und die im Regiment bekannt war, und die er wusste, noch eine andere gab, eine bedeutsamere Unterordnung, die diesen langgezogenen, lilagesichtigen General dazu zwang, respektvoll zu warten, während der Hauptmann, Fürst Andrei, zu seinem eigenen Vergnügen es bequemer fand, mit Fähnrich Drubetsky zu sprechen. Mehr denn je beschloss Boris, von nun an nicht mehr nach dem zu dienen, was im Reglement steht, sondern nach dieser ungeschriebenen Unterordnung. Er hatte nun das Gefühl, dass er nur aufgrund der Tatsache, dass er Prinz Andrei empfohlen worden war, dem General bereits sofort überlegen war, der ihn, den Gardefähnrich, in anderen Fällen an der Front vernichten konnte. Prinz Andrei kam auf ihn zu und nahm seine Hand.
„Schade, dass du mich gestern nicht gefunden hast.“ Ich habe den ganzen Tag damit verbracht, mit den Deutschen herumzualbern. Wir gingen mit Weyrother, um die Disposition zu überprüfen. Die Deutschen werden endlos auf Genauigkeit achten!
Boris lächelte, als hätte er verstanden, was Prinz Andrej wohl wissen wollte. Aber zum ersten Mal hörte er den Namen Weyrother und sogar das Wort Disposition.
- Na, mein Lieber, willst du immer noch Adjutant werden? Ich habe in dieser Zeit an dich gedacht.
„Ja, ich dachte“, sagte Boris und errötete aus irgendeinem Grund unwillkürlich, „den Oberbefehlshaber zu fragen; Es gab einen Brief von Fürst Kuragin an ihn über mich; „Ich wollte nur fragen“, fügte er entschuldigend hinzu, „weil ich Angst habe, dass die Wachen nicht im Einsatz sein werden.“
- Bußgeld! Bußgeld! „Wir werden über alles reden“, sagte Prinz Andrei, „lass mich einfach über diesen Herrn berichten, und ich gehöre zu dir.“
Zweck von Radar und ARPA
Das Radar ist für die Erkennung von Radarobjekten innerhalb des Erfassungsbereichs ausgelegt. Verwendet in: Sichtverhältnissen, Küstennavigation, komplexen Navigationsbedingungen.
Funktionsprinzip des Radars
Das Radar besteht aus 2 Teilen: einem Scanner (Antennendrehgerät, Transceiver) und einem Indikator, *Strahlungsüberwachungsgerät.
Struktur- und Funktionsdiagramm des Radars
Merkmale der Prozesse Strahlung, Ausbreitung, Reflexion und Empfang von Radiowellen.
Die Reflexionseigenschaften eines Objekts hängen von Form, Winkel, Material usw. ab.
Das Prinzip der Entfernungs- und Richtungsmessung im Navigationsradar
Reichweiten: feste Ringe, beweglicher Ring, elektronisches Visier, Cursor.
Richtungen: mechanische und elektronische Visiereinrichtung zur Richtungsablesung, Winkelablesung (KU, IP)
Bildausrichtung in Radar und ARPA Bewegungsanzeigen „OD“ ( Relativbewegung) und „ID“ (wahre Bewegung); Merkmale der Entstehung und Nutzung; Korrektur der während der ID in den Anzeiger eingegebenen Kurs- und Geschwindigkeitsdaten von GK und LAG.
OD – alle Bewegungen relativ zu meinem Schiff (Schiff in der Mitte des Bildschirms)
ID – wir folgen dem Radar, als würden wir einer Karte folgen.
Ausrichtung: Head-Up-Kurs – Einfluss von Gier, North-Up-Kurs – Koordination mit dem Hauptkörper, stabilisierter Kurs-Up-Kurs.
Wichtigste technische Eigenschaften des Radars (Impulsleistung, Strahlungswellenlänge, Dauer der ausgesendeten Impulse, Wiederholungsperiode der ausgesendeten Impulse, Breite des Antennenstrahlungsmusters (APP) in der horizontalen und vertikalen Ebene, Radarempfindlichkeit, Durchmesser und Arbeitsdurchmesser des Bildschirms , Durchmesser des Zeichenflecks.
Impulsleistung ist die Leistung, die in die Luft abgegeben wird. Bei modernen Radargeräten reicht sie von Einheiten bis zu Hunderten von kW. Sie wird durch den Magnetrontyp, die Länge des Wellenwegs und den Antennentyp bestimmt.
Strahlungswellenlänge – X-Band von drei Zentimetern (9 GHz), S-Band von zehn Zentimetern (3 GHz).
Die Tracking-Periode ist der Zeitraum, über den der Sender Energie in den Weltraum abstrahlt, abhängig von der Reichweitenskala.
Die Breite des Strahlungsmusters beträgt horizontal etwa 30 Grad, vertikal etwa 1,5 Grad.
Empfindlichkeit – die Fähigkeit, kleine Signale (10 V – 13 V) zu erkennen.
Durchmesser und Arbeitssiebdurchmesser – 180, 250, 320 mm
Zeichenfleckdurchmesser – 0,1 mm
Grundlegende Betriebsmerkmale des Navigationsradars (Koordinatenmessfehler, Mindestreichweite, Mindesterfassungsreichweite, Totzone, Schattensektoren in der horizontalen und vertikalen Ebene, Maximalreichweite, Maximale Objekterfassungsreichweite, Einfluss der Erdkrümmung, Einfluss des Untergrunds Oberfläche, Stationsbereichsauflösung, Richtungsauflösung.
Messfehler hängen von der Entfernungsskala, den Radareinstellungen und der Sondenimpulsdauer ab und betragen 1 %.
Mindestreichweite: a) Aktion – Wir minimieren den Abstand, ab dem reflektierte Signale auf den Eingang einzuwirken beginnen. Dies wird durch die Dauer des Sondenimpulses bestimmt (1 μs = 150 m => bei 150 m ist nichts sichtbar); b) Erkennung – eine Eigenschaft, die die Dauer des Sondenimpulses plus die Erholungszeit der Empfindlichkeit berücksichtigt.
Die tote Zone ist eine Zone, die durch die Höhe der Antenneninstallation und die Breite des Strahlungsmusters bestimmt wird.
Maximale Reichweite: a) Aktion – Reichweite begrenzt durch die Impulswiederholungsperiode, die von der Leistung und dem Gewinn der Antenne abhängt; b) Erkennung – hängt von der Installationshöhe der Antenne, der Art der Brechung, den Eigenschaften des bestrahlten Objekts, der Länge der Ameisenwellen des Weges und den Radareinstellungen ab und ist ein probabilistisches Merkmal.
Der Einfluss der Erdkrümmung – D = k*(Wurzel(h1)+Wurzel(h2))
Einfluss des Untergrunds – der Untergrund verändert die Verstärkung vom 0- bis zum 16-fachen. Auf dem Radarschirm ergibt sich dadurch eine sinusförmige Änderung der Signalhelligkeit in Abhängigkeit von der Entfernungsänderung.
Stationsauflösung: a) in Reichweite – das ist der Mindestabstand zwischen 2 Punkten, der es ermöglicht, Ziele getrennt zu beobachten. Hängt von der Impulsdauer und der Qualität der Sendereinstellungen ab. Ist 15-20m; b) in Richtung – der Abstand zwischen zwei äquidistanten Zielen, wenn sie getrennt beobachtet werden. Hängt von der Breite der Diagramme ab, z.B.
IMO-Anforderungen für Navigationsradare. (Anzeige von Informationen, Satz von Indikatorentfernungsskalen, Anzeige von Entfernungsskalen, Art der im effektiven Bereich des Radarbilds angezeigten Informationen, Mehrfarbenbild auf dem Bildschirm, Bild der elektronischen Karte des Systems).
Erfassungsbereich: Ufer 15 m, 5000 t 7 m, 10 m 3 m, Boje 2 m. Die Mindesterkennungsreichweite beträgt 50 m. Anzeige 180, 250, 320 mm. Mehrfarbig ist zulässig, das Grundbild muss jedoch dieselbe Farbe wie die Farbtöne haben. Skalen: 0,25 nm, 0,5 nm, 0,75 nm, 1,5 nm, 3,0 nm, 6,0 nm, 12,0 nm, 24 nm, 48 nm und 96 nm. Eine Neigung von 10-15 Grad sollte nicht zu einer Bildverschlechterung führen. Antennenrotationsgeschwindigkeit 20 Mal/Min. ID- und OD-Modus. ECDIS-Bild von 2012, Inhalt: Takeline, Sicherheitstiefenkontur für eigenes Schiff, Navigationsgefahren.
Eingriffe in die Radarüberwachung, deren Merkmale und Identifizierung. (Empfänger- und atmosphärisches Rauschen, Störungen durch benachbarte Radargeräte („nichtsynchrone Störungen“), falsche Entfernungsmarkierungen; Wobble-Modus, Störungen durch Mehrfachreflexionen und Nebenkeulen; „Locals“, Störungen durch raue Meeresoberflächen; vorübergehende automatische Verstärkungsregelung ( TAG) ), Interferenz von hydrometeorologischen Formationen; Kette kleiner Zeitkonstanten (STC). Optimale Methoden für die Einrichtung und Verwendung von TVG und STC.)
Störungen durch das Meer: Die Intensität nimmt ab, wenn man sich vom Schiff entfernt. Auf dem Bildschirm sind rundherum 3–4 m Leuchtsignale zu sehen, in einer Entfernung von 1–2 m ist fast ein Leuchtsignal zu sehen. Um Störungen zu bekämpfen, verwenden Sie VARU (!3 Zeichen). Der db-Regler ist so konfiguriert, dass auf dem Bildschirm Störspuren auftreten, deren Helligkeit geringer ist als die potenzielle Helligkeit.
Störungen durch hydrometeorologische Formationen: Sie können von beliebigen hydrometeorologischen Formationen ausgehen, sie bekämpfen mit den MPV-Griffen (kurze Bewegungszeit) – Interferenzkompensation. Oder es wird der 10cm-Bereich genutzt.
Empfänger- und Atmosphärenrauschen: Auf dem Bildschirm erscheinen chaotische Ausbrüche, die Intensität hängt von der Verstärkungsstufe ab. Wählen Sie mit dem Kornknopf 2-3 Ausbrüche pro 1 cm² aus.
Störung durch ein benachbartes Radar: Flügel.
Synchrone Interferenz: Spirale.
Synchronimpuls: Sektor in Richtung der Quelle.
Fehlziele: a) Rückreflexion (Reflexion an einem Rohr), b) Rückreflexion an Hindernissen (Langzeitbeobachtung), c) durch mehrfache Rückreflexion (Zielkette), d) durch Nebenkeulen ( Punktbogen), e) durch stromführende Leitungen, f) durch Superbrechung, g) absichtlich eingebrachte Störungen.
Automatische Radarplotgeräte (ARPA). (Zielerfassung für automatische Verfolgung, manuelle und automatische Erfassungsoptionen, Erfassungskriterien.)
ARPA wird verwendet als: - ein Medium, das die Sicherheit der Navigation in Gebieten mit intensiver Schifffahrt, in Küstennähe, in Verkehrszonen, Engpässen und Fahrwassern erhöht, - ein Navigationssensor, der für den Navigator notwendig ist, um die Situation richtig einzuschätzen und eine fundierte Entscheidung zu treffen für Divergenz.
Handlungsablauf: Informationen beschaffen, Objekt erkennen, Koordinaten messen, Zielbewegungsparameter ermitteln, Besprechungsparameter ermitteln, Besprechungssituation beurteilen, Manöver planen, Manöver durchführen und überwachen.
Erfassung: manuell und automatisch (zur Überprüfung der Verfügbarkeit wird das Erfassungskriterium verwendet – die Anzahl der kontinuierlichen aufeinanderfolgenden Zielerkennungen während aufeinanderfolgender Überprüfungen – 3x3, 5x5, 15x15).
ARPA. Primäre Verarbeitung von Radarsignalen (Quantisierung, Filterung, Erkennung von Nutzsignalen, Erkennung und Identifizierung (Klassifizierung) von Objekten, Messung von Objektkoordinaten; Implementierungsmerkmale, verwendete Erfassungskriterien).
1) Signalumwandlung in digitale Form (Quantisierung, Abtastung, Kodierung), 2) Intra-Pulse-Filterung, Inter-Beobachter-Filterung, 3) Erkennung eines Nutzsignals, 4) Zielerfassung zur Verfolgung, 5) Zielverfolgung.
ARPA. Sekundärverarbeitung von Radarinformationen: Formular
1) Glättung der Koordinaten, 2) Entwicklung von Bewegungs- und Annäherungspaaren, 3) Beurteilung der Begegnungssituation, 4) Planung und Durchführung des Manövers.
Verzögerungen bei der Entwicklung eines Formulars: 1 Minute – Bearbeitungszeit für Vorinformationen, 3 Minuten – Zeit für die Entwicklung maximaler Genauigkeit. Genauigkeit: Peilung 0,5 und 1,5 Grad, Zielkurs 3 Grad, Geschwindigkeit 1kt, Dcr 1/4M, Tcr 1min.
Verarbeitung von Radarinformationen- der Prozess, die vom Radar empfangenen Informationen in eine für die weitere Übertragung geeignete Form zu bringen.
Die Verarbeitung der Radarinformationen erfolgte zunächst durch einen hinter dem Radaranzeiger sitzenden Soldaten (Begleitpersonal). Derzeit wird dies automatisch und halbautomatisch durchgeführt, was die Produktivität des Bedieners erhöht.
Primärverarbeitung
Das Wesentliche: Ziele vor dem Hintergrund von Lärm und Störungen identifizieren, „Freund oder Feind“ identifizieren
Eingang: Radarsignal.
Ausgabe: Position der Ziele, ihre Winkelgröße, Azimut und Entfernung.
Ausgeführt: durch ein primäres Verarbeitungsgerät im Radar; zuvor - Radarinformationsverarbeitungspunkte.
Sekundärverarbeitung
Das Wesentliche: Identifizierung von Zielen während mehrerer Radarabtastzyklen; Berechnung von Richtung und Geschwindigkeit; Bekämpfung primärer Verarbeitungsfehler – doppelte Ziele, zufällige Ausbrüche und vorübergehendes Verschwinden von Zielen.
Eingabe: durch Primärverarbeitung erhaltene Ziele.
Durchgeführt: manuell durch einen Supportmitarbeiter; eine Rada(auf Radarunternehmensebene) halb- und automatisch.
Tertiäre Verarbeitung
Die Essenz: Vergleich von Informationen aus mehreren Quellen.
Eingabe: Zielspuren, die als Ergebnis der Sekundärverarbeitung erhalten wurden; Radarkoordinaten.
Ausgabe: Zielspuren unter Berücksichtigung der Übertragung eines Ziels von einem Radar auf ein anderes, der Genauigkeit verschiedener Quellen usw.
Durchgeführt: auf der Ebene des technischen Funkbataillons und höher; manuell (durch einen Tablet-Bediener), halbautomatisch oder automatisch durch ein automatisiertes Steuerungssystem.
Wikimedia-Stiftung. 2010.
Sehen Sie in anderen Wörterbüchern, was „Verarbeitung von Radarinformationen“ ist:
ORLY- Verarbeitung von Radarinformationskommunikation... Wörterbuch der Abkürzungen und Abkürzungen
Wikipedia hat Artikel über andere Personen mit diesem Nachnamen, siehe Benenson. Zalman Mikhailovich Benenson Geburtsdatum ... Wikipedia
Dieser Begriff hat andere Bedeutungen, siehe Spark. Koordinaten: 47°50′16″ N. w. 35°13′47″ E. d. / 47,837778° n. w. 35,229722° Ost. d. ... Wikipedia
Anti-Schiffs-Marschflugkörper P-35 (P-6)- 1964 Am 17. August 1956 wurde das Dekret CM CCCH Nr. 1149–592 über den Beginn der Entwicklung der Anti-Schiffs-Marschflugkörper P 6 und P 35 erlassen. Beide Raketen wurden bei OKB 52 entworfen und unterschieden sich kaum voneinander. P 6 war für den Unterwassereinsatz gedacht... ... Militärische Enzyklopädie
Eine Reihe von Maßnahmen zur Beschaffung und Verarbeitung von Daten über einen tatsächlichen oder potenziellen Feind, seine militärischen Ressourcen, Kampffähigkeiten und Schwachstellen sowie den Schauplatz militärischer Operationen. Einstufung. Der moderne militärische Geheimdienst ist unterteilt in... ... Colliers Enzyklopädie
AIM 120-Rakete Typ Luft-Luft-Rakete ... Wikipedia
Studie der Erde, eine Reihe von Methoden zur Erforschung und Kartierung der geografischen Hülle der Erde, ihrer inhärenten Phänomene und Objekte der Natur- und Kulturlandschaft aus Flugzeugen. Ihre physikalische Eigenschaften kann sich anmelden bei... ...
Mathematik Wissenschaftliche Forschung auf dem Gebiet der Mathematik begann man in Russland im 18. Jahrhundert, als L. Euler, D. Bernoulli und andere westeuropäische Wissenschaftler Mitglieder der St. Petersburger Akademie der Wissenschaften wurden. Nach dem Plan von Peter I. sind Akademiker Ausländer... ... Große sowjetische Enzyklopädie
Victor Filippovich Kravchenko Geburtsdatum: 5. Oktober 1939 (1939 10 05) (73 Jahre alt) Geburtsort: Charkow, Ukraine, UdSSR Land ... Wikipedia
I Pulstechnik ist ein Technologiegebiet, das Methoden und technische Mittel zur Erzeugung (Umformung), Umwandlung und Messung elektrischer Impulse untersucht, entwickelt und anwendet (siehe Elektrischer Impuls). In I. t. auch... ... Große sowjetische Enzyklopädie