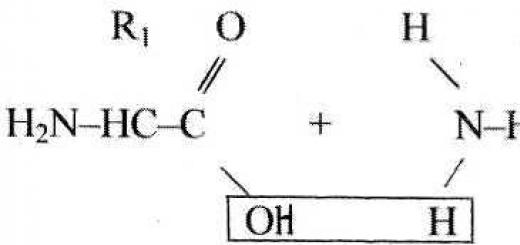
Svi referentni sustavi dijele se na inercijalne i neinercijalne. Inercijski referentni okvir leži u osnovi Newtonove mehanike. Karakterizira uniformu pravocrtno kretanje i stanje mirovanja. Neinercijalni referentni okvir povezan je s ubrzanim gibanjem duž druge putanje. Ovo gibanje je definirano s obzirom na inercijalne referentne okvire. Neinercijalni referentni okvir povezan je s učincima kao što su inercijalna sila, centrifugalna sila i Coriolisova sila.
Svi ti procesi nastaju kao rezultat kretanja, a ne interakcije između tijela. Newtonovi zakoni često ne rade u neinercijalnim referentnim okvirima. U takvim slučajevima se klasičnim zakonima mehanike dodaju izmjene i dopune. Sile uzrokovane neinercijskim gibanjem uzimaju se u obzir pri razvoju tehničkih proizvoda i mehanizama, uključujući i one u kojima je prisutna rotacija. U životu ih susrećemo, krećući se liftom, vozeći se na vrtuljku, promatrajući vrijeme i tokove rijeka. Također se uzimaju u obzir pri proračunu gibanja svemirskih letjelica.
Inercijalni i neinercijalni referentni sustavi
Inercijalni referentni sustavi nisu uvijek prikladni za opisivanje gibanja tijela. U fizici postoje dvije vrste referentnih sustava: inercijalni i neinercijalni referentni sustavi. Prema Newtonovoj mehanici svako tijelo može biti u stanju mirovanja ili jednolikog i pravocrtnog gibanja, osim u slučajevima kada na tijelo djeluje vanjski utjecaj. Ovaj jednoliko kretanje naziva kretanje po inerciji.
Inercijalno gibanje (inercijalni referentni okviri) čini osnovu Newtonove mehanike i Galileiovih radova. Ako zvijezde smatramo stacionarnim objektima (što zapravo nije sasvim točno), tada će svi objekti koji se gibaju ravnomjerno i pravocrtno u odnosu na njih tvoriti inercijske referentne okvire.

Za razliku od inercijalnih referentnih sustava, neinercijalni se okvir giba u odnosu na navedeni s određenom akceleracijom. Štoviše, korištenje Newtonovih zakona zahtijeva dodatne varijable, inače one neće adekvatno opisati sustav. Da bismo odgovorili na pitanje koji se referentni sustavi nazivaju neinercijalnim, vrijedi razmotriti primjer neinercijalnog gibanja. Ovo kretanje je rotacija našeg i drugih planeta.
Gibanje u neinercijalnim referentnim okvirima
Kopernik je prvi pokazao koliko kretanje može biti složeno ako je uključeno više sila. Prije njega se vjerovalo da se Zemlja kreće sama od sebe, u skladu s Newtonovim zakonima, pa je stoga njezino kretanje inercijalno. No, Kopernik je dokazao da se Zemlja okreće oko Sunca, odnosno da se ubrzano giba u odnosu na uvjetno nepokretni objekt, što bi mogla biti zvijezda.

Dakle, postoje različiti referentni okviri. Neinercijskim se nazivaju samo oni kod kojih postoji ubrzano gibanje, koje je određeno u odnosu na inercijalni sustav.
Zemlja kao referentni okvir
Neinercijalni referentni sustav, čiji se primjeri mogu naći gotovo posvuda, tipičan je za tijela sa složenom putanjom gibanja. Zemlja rotira oko Sunca, što stvara ubrzano gibanje, karakteristično za neinercijalne referentne sustave. Međutim, u svakodnevnoj praksi sve što susrećemo na Zemlji sasvim je u skladu s Newtonovim postulatima. Stvar je u tome što su korekcije za neinercijsko gibanje za referentne sustave povezane sa Zemljom vrlo beznačajne i ne igraju veliku ulogu za nas. I iz istog razloga, pokazalo se da su Newtonove jednadžbe općenito važeće.

Foucaultovo njihalo
Međutim, u nekim slučajevima izmjene se ne mogu izbjeći. Na primjer, svjetski poznato Foucaultovo njihalo u katedrali u Sankt Peterburgu ne samo da oscilira linearno, već se i sporo rotira. Ova rotacija je posljedica neinercijalnog gibanja Zemlje u svemiru.
Ovo je prvi put postalo poznato 1851. nakon eksperimenata francuskog znanstvenika L. Foucaulta. Sam eksperiment nije izveden u Sankt Peterburgu, već u Parizu, u ogromnoj dvorani. Težina kuglice njihala bila je oko 30 kg, a duljina niti za spajanje čak 67 metara.
U slučajevima kada same Newtonove formule za inercijalni referentni okvir nisu dovoljne za opis gibanja, dodaju im se tzv. inercijalne sile.
Svojstva neinercijalnog referentnog okvira
Neinercijalni referentni sustav izvodi različita gibanja u odnosu na inercijalni. To može biti translacijsko kretanje, rotacija, složeni kombinirani pokreti. U literaturi ima i takvih najjednostavniji primjer neinercijalni referentni okvir, poput ubrzanog dizala. Zbog njegovog ubrzanog kretanja osjećamo se kao da smo pritisnuti na pod ili, obrnuto, javlja se osjećaj blizak bestežinskom stanju. Newtonovi zakoni mehanike ne mogu objasniti ovaj fenomen. Ako slijedite poznatog fizičara, tada će u svakom trenutku ista sila gravitacije djelovati na osobu u dizalu, što znači da bi osjećaji trebali biti isti, ali u stvarnosti je sve drugačije. Stoga je Newtonovim zakonima potrebno dodati dodatnu silu koja se naziva sila tromosti.

Sila inercije
Sila inercije je stvarna djelujuća sila, iako se po prirodi razlikuje od sila povezanih s međudjelovanjem između tijela u prostoru. Uzima se u obzir pri razvoju tehničkih konstrukcija i uređaja, a igra važnu ulogu u njihovom radu. Mjere se inercijske sile različiti putevi, na primjer, pomoću opružnog dinamometra. Neinercijalni referentni sustavi nisu zatvoreni jer se inercijalne sile smatraju vanjskim. Inercijalne sile su objektivne fizički faktori a ne ovise o volji i mišljenju promatrača.
Inercijalni i neinercijalni referentni sustavi, čiji se primjeri manifestiraju u udžbenicima fizike, su djelovanje inercijske sile, centrifugalne sile, Coriolisove sile, prijenos količine gibanja s jednog tijela na drugo i drugi.

Kretanje u liftu
Neinercijalni referentni sustavi i inercijalne sile dobro se manifestiraju tijekom ubrzanog uspona ili spuštanja. Ako se dizalo ubrzava prema gore, tada rezultirajuća inercijska sila nastoji pritisnuti osobu na pod, a pri kočenju tijelo, naprotiv, počinje se činiti lakšim. U pogledu svojih manifestacija, sila inercije je u ovom slučaju slična sili gravitacije, ali ima potpuno drugačiju prirodu. Gravitacija je gravitacija, koja je povezana s međudjelovanjem između tijela.

Centrifugalne sile
Sile u neinercijalnim referentnim sustavima mogu biti i centrifugalne. Takvu silu potrebno je uvesti iz istog razloga kao i silu tromosti. Eklatantan primjer djelovanja centrifugalnih sila – rotacija na vrtuljku. Dok stolac nastoji zadržati osobu u svojoj "orbiti", sila inercije uzrokuje da tijelo bude pritisnuto na vanjski naslon stolca. Ova konfrontacija se izražava pojavom takvog fenomena kao što je centrifugalna sila.
Coriolisova sila
Djelovanje te sile dobro je poznato iz primjera rotacije Zemlje. Silom se može nazvati samo uvjetno, jer to nije. Suština njegovog djelovanja je da se tijekom rotacije (npr. Zemlja) svaka točka sfernog tijela kreće kružno, dok se objekti odvojeni od Zemlje idealno kreću pravocrtno (kao što je npr. tijelo slobodno leteći u svemir). Budući da je linija zemljopisne širine putanja rotacije točaka Zemljina površina, i ima oblik prstena, tada sva tijela koja su otrgnuta od njega i u početku se kreću duž ove linije, krećući se linearno, počinju sve više odstupati od nje u smjeru nižih geografskih širina.
Druga opcija je kada se tijelo lansira u meridionalnom smjeru, ali zbog rotacije Zemlje, sa stajališta zemaljskog promatrača, kretanje tijela više neće biti striktno meridionalno.
Coriolisova sila djeluje veliki utjecaj o razvoju atmosferskih procesa. Pod njegovim utjecajem voda jače udara u istočnu obalu rijeka koje teku u meridijalnom smjeru, postupno je erodirajući, što dovodi do pojave litica. Na zapadnoj strani, naprotiv, talože se oborine, pa je ravnija i za vrijeme poplava često preplavljena vodom. Istina, to nije jedini razlog što je jedna obala rijeke viša od druge, ali je u mnogim slučajevima dominantna.
Coriolisova sila ima i eksperimentalnu potvrdu. Dobio ga je njemački fizičar F. Reich. U pokusu su tijela padala s visine od 158 m. Izvedeno je ukupno 106 takvih pokusa. Pri padu tijela su odstupila od pravocrtne (sa gledišta zemaljskog promatrača) putanje za otprilike 30 mm.
Inercijski referentni okviri i teorija relativnosti
Einsteinova specijalna teorija relativnosti nastala je u odnosu na inercijalne referentne sustave. Takozvani relativistički efekti, prema ovoj teoriji, trebali bi nastati u slučaju vrlo velikih brzina gibanja tijela u odnosu na “stacionarnog” promatrača. Sve formule posebna teorija relativnosti također su opisani za karakteristike jednolikog gibanja inercijalnog referentnog sustava. Prvi postulat ove teorije tvrdi ekvivalentnost bilo kojeg inercijalnog referentnog sustava, tj. postulira se nepostojanje posebnih, istaknutih sustava.
Međutim, to dovodi u sumnju mogućnost testiranja relativističkih učinaka (kao i samu činjenicu njihovog postojanja), što je dovelo do pojave takvog fenomena kao što je paradoks blizanaca. Budući da su referentni sustavi povezani s raketom i Zemljom u osnovi jednaki, učinci dilatacije vremena u paru Zemlja-raketa ovisit će samo o tome gdje se promatrač nalazi. Dakle, za promatrača na raketi vrijeme na Zemlji bi trebalo ići sporije, a za osobu na našem planetu, naprotiv, trebalo bi ići sporije na raketi. Zbog toga će blizanac koji je ostao na Zemlji brata koji dolazi vidjeti mlađeg, a onaj koji je bio u raketi, po dolasku bi ga trebao vidjeti mlađim od onog koji je ostao na Zemlji. Jasno je da je to fizički nemoguće.
To znači da nam je za promatranje relativističkih učinaka potrebna neka vrsta posebnog, namjenskog referentnog sustava. Na primjer, pretpostavlja se da opažamo relativističko povećanje životnog vijeka miona ako se kreću brzinom bliskom svjetlosti u odnosu na Zemlju. To znači da Zemlja mora (bez alternative) imati svojstva prioritetnog, osnovnog referentnog sustava, što je u suprotnosti s prvim postulatom STR. Prioritet je moguć samo ako je Zemlja središte svemira, što je u skladu samo s primitivnom slikom svijeta i proturječi fizici.
Neinercijalni referentni okviri kao neuspjeli način objašnjenja paradoksa blizanaca
Pokušaji da se objasni prioritet "zemaljskog" referentnog sustava ne podnose kritiku. Neki znanstvenici taj prioritet povezuju upravo s faktorom inercijalnosti jednog i neinercijalnosti drugog referentnog sustava. U ovom slučaju, referentni sustav povezan s promatračem na Zemlji smatra se inercijalnim, unatoč činjenici da u fizička znanost službeno je priznat kao neinercijalan (Dettlaff, Yavorsky, tečaj fizike, 2000). Ovo je prvi. Drugi je isti princip jednakosti svih referentnih sustava. Dakle, ako svemirski brod ubrzano napušta Zemlju, tada je sa stajališta promatrača na samom brodu statična, a Zemlja, naprotiv, leti od nje sve većom brzinom.
Ispostavilo se da je sama Zemlja poseban referentni okvir ili promatrani efekti imaju drugačije (nerelativističko) objašnjenje. Možda su procesi povezani s osobitostima postavljanja ili tumačenja pokusa ili s drugim fizičkim mehanizmima promatranih pojava.
Zaključak
Dakle, neinercijalni referentni okviri dovode do pojave sila koje nisu našle svoje mjesto u Newtonovim zakonima mehanike. Prilikom proračuna za neinercijalne sustave, uzimanje u obzir tih sila je obavezno, uključujući i razvoj tehničkih proizvoda.
Od davnina pokret materijalna tijela nikada nije prestao uzbuđivati umove znanstvenika. Na primjer, sam je Aristotel vjerovao da ako na tijelo ne djeluju nikakve sile, tada će takvo tijelo uvijek mirovati.
A tek 2000 godina kasnije, talijanski znanstvenik Galileo Galilei uspio je isključiti riječ "uvijek" iz Aristotelove formulacije. Galileo je shvatio da prisutnost tijela u stanju mirovanja nije jedina posljedica odsutnosti vanjske sile.
Tada je Galileo izjavio: tijelo na koje ne djeluju nikakve sile će ili mirovati ili se gibati jednoliko pravocrtno. Odnosno, kretanje istom brzinom po ravnoj stazi, s gledišta fizike, ekvivalentno je stanju mirovanja.
Što je stanje mirovanja?
U životu je ovu činjenicu vrlo teško uočiti, budući da uvijek postoji sila trenja koja sprječava predmete i stvari da napuste svoja mjesta. Ali ako zamislite beskonačno dugačak, apsolutno sklizak i gladak valjak na kojem stoji tijelo, postat će očito da ako tijelu date impuls, tijelo će se kretati neograničeno i u jednoj ravnoj liniji.
Doista, samo dvije sile djeluju na tijelo: gravitacija i sila reakcije tla. Ali nalaze se na istoj ravnoj liniji i usmjereni su jedni protiv drugih. Dakle, prema principu superpozicije, imamo da je ukupna sila koja djeluje na takvo tijelo jednaka nuli.
Međutim, ovo je idealan slučaj. U životu se sila trenja očituje u gotovo svim slučajevima. Galileo je došao do važnog otkrića izjednačivši stanje mirovanja i pravocrtno gibanje konstantnom brzinom. Ali ovo nije bilo dovoljno. Pokazalo se da taj uvjet nije ispunjen u svim slučajevima.
Ovo je pitanje razjasnio Isaac Newton, koji je sažeo Galileova istraživanja i tako formulirao Prvi Newtonov zakon.
Prvi Newtonov zakon: sami ga formuliramo
Postoje dvije formulacije prvog Newtonovog zakona: moderna i formulacija samog Isaaca Newtona. U izvornoj verziji prvi Newtonov zakon donekle je netočan i moderna verzija u pokušajima ispravljanja te netočnosti pokazalo se vrlo zbunjujućim i stoga neuspješnim. Pa, budući da je istina uvijek negdje u blizini, pokušat ćemo je pronaći "u blizini" i shvatiti koji je to zakon.
Moderna formulacija zvuči ovako: "Postoje takvi referentni sustavi, koji se nazivaju inercijski, u odnosu na koje materijalna točka, u odsutnosti vanjskih utjecaja, zadržava veličinu i smjer svoje brzine na neodređeno vrijeme".
Inercijalni referentni sustavi
Inercijalni referentni sustavi su oni u kojima je zadovoljen zakon tromosti. Zakon tromosti kaže da tijela zadržavaju svoju brzinu nepromijenjenom ako na njih ne djeluju druga tijela. Ispada vrlo neprobavljivo, neshvatljivo i podsjeća na komičnu situaciju kada se na pitanje: “Gdje je ovo “ovdje”?” Odgovaraju: "Ovdje je", a na sljedeće logično pitanje: "Gdje je "ovdje"?" Oni odgovaraju: "Ovdje je." Maslac ulje. Začarani krug.
Newtonova vlastita formulacija Je li ovo: "Svako se tijelo nastavlja održavati u stanju mirovanja ili ravnomjernog i pravocrtnog gibanja sve dok i osim ako nije prisiljeno primijenjenim silama da promijeni to stanje.".
Međutim, u praksi se ovaj zakon ne poštuje uvijek. To možete lako provjeriti. Kada osoba stoji bez držanja za rukohvate u autobusu u pokretu, a autobus naglo zakoči, osoba se počinje pomicati naprijed u odnosu na autobus, iako je nikakva vidljiva sila ne prisiljava na to.
To jest, s obzirom na autobus, prvi Newtonov zakon u svojoj izvornoj formulaciji nije zadovoljen. Očito je potrebno pojašnjenje. Pojašnjenje je uvođenje inercijalnih referentnih sustava. Odnosno, takve referentne sustave u kojima je zadovoljen prvi Newtonov zakon. Ovo nije sasvim jasno, pa pokušajmo sve ovo prevesti na ljudski jezik.
Inercijalni i neinercijalni referentni sustavi
Svojstvo tromosti svakog tijela je takvo da sve dok je tijelo izolirano od drugih tijela, ono će zadržati svoje stanje mirovanja ili ravnomjernog pravocrtnog gibanja. "Izolirano" znači nepovezano ni na koji način, beskrajno udaljeno od drugih tijela.
U praksi to znači da ako u našem primjeru ne uzmemo autobus kao referentni sustav, već neku zvijezdu na periferiji galaksije, tada će prvi Newtonov zakon biti apsolutno točno zadovoljen za nemarnog putnika koji se ne drži rukohvati. Kada autobus koči, nastavit će svoje jednoliko gibanje sve dok druga tijela ne djeluju na njega.
Takvi referentni sustavi, koji nisu ni na koji način povezani s promatranim tijelom i koji ni na koji način ne utječu na tromost tijela, nazivaju se inercijskim. Za takve referentne sustave prvi Newtonov zakon u svojoj izvornoj formulaciji apsolutno vrijedi.
Takav je zakon može ovako formulirati: u referentnim sustavima koji apsolutno nisu povezani s tijelom, brzina tijela u odsutnosti vanjskog utjecaja ostaje nepromijenjena. U ovom je obliku prvi Newtonov zakon lako razumljiv.
Problem je u tome što je u praksi vrlo teško razmotriti gibanje određenog tijela u odnosu na takve referentne sustave. Ne možemo se preseliti na beskonačno udaljenu zvijezdu i odatle izvoditi bilo kakve eksperimente na Zemlji.
Stoga se Zemlja konvencionalno često uzima kao takav referentni sustav, iako je povezana s tijelima koja se nalaze na njoj i utječe na karakteristike njihova kretanja. Ali za mnoge izračune ova je aproksimacija dovoljna. Stoga se primjeri inercijalnih referentnih sustava mogu smatrati Zemljom za tijela koja se na njoj nalaze, Sunčev sustav za svoje planete i tako dalje.
Prvi Newtonov zakon nije opisan nikakvom fizikalnom formulom, ali se uz njegovu pomoć izvode drugi pojmovi i definicije. U biti, ovaj zakon postulira tromost tijela. I tako ispada da je za inercijalne referentne sustave zakon tromosti prvi Newtonov zakon.
Više primjera inercijalnih sustava i prvi Newtonov zakon
Tako, na primjer, ako se kolica s loptom prvo kreću ravnom površinom, stalnom brzinom, a zatim se zabace na pješčanu površinu, tada će se lopta unutar kolica početi ubrzavati, iako na nju ne djeluju nikakve sile (u zapravo, da, ali njihov iznos je nula).
To se događa jer referentni sustav (u ovom slučaju kolica) u trenutku kada udari o pješčanu podlogu postaje neinercijalan, odnosno prestaje se kretati konstantnom brzinom.
Prvi Newtonov zakon čini važnu razliku između inercijalnih i neinercijalnih referentnih sustava. Druga važna posljedica ovog zakona je činjenica da je ubrzanje, u određenom smislu, važnije od brzine tijela.
Jer pravocrtno kretanje stalnom brzinom je mirovanje. Dok gibanje s akceleracijom jasno pokazuje da ili zbroj sila koje djeluju na tijelo nije jednak nuli, ili je sam referentni okvir u kojem se tijelo nalazi neinercijalan, odnosno giba se ubrzano.
Štoviše, ubrzanje može biti pozitivno (tijelo ubrzava) ili negativno (tijelo usporava).
Trebate li pomoć s učenjem?
Prethodna tema: Relativnost gibanja: pojam i primjeriSljedeća tema: Newtonov drugi zakon: formula i definicija + malo iskustva
Drevni filozofi pokušavali su shvatiti bit kretanja, identificirati utjecaj zvijezda i Sunca na čovjeka. Osim toga, ljudi su oduvijek pokušavali identificirati sile koje djeluju na materijalnu točku tijekom njezina kretanja, kao iu trenutku mirovanja.
Aristotel je vjerovao da u nedostatku kretanja na tijelo ne djeluju nikakve sile. Pokušajmo saznati koji se referentni sustavi nazivaju inercijskim i dati primjere za njih.
Stanje mirovanja
U Svakidašnjica teško je identificirati takvo stanje. Gotovo sve vrste mehaničko kretanje pretpostavlja se prisutnost vanjskih sila. Razlog je sila trenja, koja sprječava mnoge predmete da napuste svoj prvobitni položaj i izađu iz stanja mirovanja.
Razmatrajući primjere inercijalnog referentnog sustava, napominjemo da su svi u skladu s 1. Newtonovim zakonom. Tek nakon njegovog otkrića bilo je moguće objasniti stanje mirovanja i naznačiti sile koje u tom stanju djeluju na tijelo.

Izjava 1. Newtonovog zakona
U modernoj interpretaciji objašnjava postojanje koordinatnih sustava, u odnosu na koje se može smatrati odsutnost utjecaja vanjskih sila na materijalnu točku. S Newtonove točke gledišta, referentni sustavi nazivaju se inercijski, koji nam omogućuju da razmotrimo očuvanje brzine tijela tijekom dugog vremena.
Definicije
Koji su referentni sustavi inercijalni? Njihovi primjeri proučavaju se u školski tečaj fizika. Inercijskim sustavima smatraju se oni referentni sustavi u odnosu na koje se materijalna točka giba konstantnom brzinom. Newton je pojasnio da svako tijelo može biti u sličnom stanju sve dok nema potrebe da se na njega primjenjuju sile koje mogu promijeniti takvo stanje.
U stvarnosti, zakon inercije nije zadovoljen u svim slučajevima. Analizirajući primjere inercijalnih i neinercijalnih referentnih sustava, razmotrite osobu koja se drži za rukohvate u vozilu u pokretu. Kada automobil naglo koči, osoba se automatski pomiče u odnosu na vozilo, unatoč odsutnosti vanjske sile.
Ispada da svi primjeri inercijalnog referentnog sustava ne odgovaraju formulaciji 1. Newtonovog zakona. Da bi se pojasnio zakon inercije, uvedena je profinjena referenca, u kojoj je on besprijekorno ispunjen.

Vrste referentnih sustava
Koji se referentni sustavi nazivaju inercijskim? To će uskoro postati jasno. "Navedite primjere inercijalnih referentnih sustava u kojima je zadovoljen 1. Newtonov zakon" - sličan zadatak nudi se učenicima koji su odabrali fiziku kao ispit u devetom razredu. Za rješavanje zadatka potrebno je poznavati inercijalne i neinercijalne referentne sustave.
Inercija uključuje održavanje mirovanja ili ravnomjernog pravocrtnog gibanja tijela sve dok je tijelo izolirano. “Izoliranim” se smatraju tijela koja nisu povezana, ne djeluju međusobno i udaljena su jedno od drugog.
Pogledajmo neke primjere inercijalnih referentnih sustava. Ako referentni okvir smatramo zvijezdom u Galaksiji, a ne autobusom u pokretu, ispunjenje zakona inercije za putnike koji se drže za rukohvate bit će besprijekorno.
Tijekom kočenja ovo vozilo nastavit će jednoliko pravocrtno gibanje sve dok na njega ne djeluju druga tijela.
Koji su neki od primjera inercijalnog referentnog okvira? Ne bi smjeli imati veze s tijelom koje se analizira niti utjecati na njegovu inerciju.
Za takve sustave je zadovoljen 1. Newtonov zakon. U stvaran život teško je razmatrati kretanje tijela u odnosu na inercijalne referentne okvire. Nemoguće je doći do daleke zvijezde kako bi se s nje vršili zemaljski eksperimenti.
Kao uvjetni sustavi Zemlja je uzeta kao referenca, unatoč činjenici da je povezana s objektima koji se nalaze na njoj.
Ubrzanje u inercijalnom referentnom sustavu može se izračunati ako se Zemljina površina smatra referentnim okvirom. U fizici ne postoji matematički prikaz 1. Newtonovog zakona, ali je temelj za izvođenje mnogih fizikalnih definicija i pojmova.

Primjeri inercijalnih referentnih sustava
Učenicima je to ponekad teško razumjeti fizičke pojave. Učenicima devetog razreda nudi se zadatak sljedećeg sadržaja: „Koji se referentni sustavi nazivaju inercijskim? Navedite primjere takvih sustava." Pretpostavimo da se kolica s loptom u početku gibaju po ravnoj površini konstantnom brzinom. Zatim se kreće po pijesku, kao rezultat toga lopta se ubrzano kreće, unatoč činjenici da na nju ne djeluju druge sile (njihov ukupni učinak je nula).
Bit onoga što se događa može se objasniti činjenicom da dok se kreće duž pješčane površine, sustav prestaje biti inercijalan, ima konstantnu brzinu. Primjeri inercijalnih i neinercijalnih referentnih sustava pokazuju da se njihov prijelaz događa u određenom vremenskom razdoblju.
Kada se tijelo ubrzava, njegovo ubrzanje ima pozitivnu vrijednost, a kada koči ovaj pokazatelj postaje negativan.

Krivocrtno kretanje
U odnosu na zvijezde i Sunce, kretanje Zemlje se odvija duž zakrivljene putanje, koja ima oblik elipse. Inercijskim ćemo smatrati referentni sustav u kojem je središte usmjereno prema Suncu, a osi usmjerene prema određenim zvijezdama.
Imajte na umu da je svaki referentni sustav koji se giba pravocrtno i jednoliko u odnosu na heliocentrični sustav inercijalan. Krivolinijski pokret se izvodi s određenim ubrzanjem.
S obzirom na to da se Zemlja kreće oko svoje osi, referentni okvir koji je povezan s njezinom površinom, u odnosu na heliocentrični, kreće se s određenim ubrzanjem. U takvoj situaciji možemo zaključiti da se referentni okvir, koji je povezan s površinom Zemlje, giba ubrzano u odnosu na heliocentrični, pa se ne može smatrati inercijskim. Ali vrijednost ubrzanja takvog sustava je toliko mala da u mnogim slučajevima značajno utječe na specifičnosti mehaničkih pojava koje se razmatraju u vezi s njim.
Da bi se riješili praktični problemi tehničke prirode, uobičajeno je referentni okvir koji je kruto povezan s površinom Zemlje smatrati inercijalnim.

Galileijeva relativnost
Svi inercijalni referentni sustavi imaju važna imovina, koji je opisan principom relativnosti. Njegova bit leži u činjenici da se svaka mehanička pojava pod istim početnim uvjetima odvija na isti način, bez obzira na odabrani referentni sustav.
Jednakost ISO-a prema načelu relativnosti izražena je u sljedećim odredbama:
- U takvim sustavima oni su isti, stoga svaka jednadžba koja je njima opisana, izražena koordinatama i vremenom, ostaje nepromijenjena.
- Rezultati provedenih mehaničkih eksperimenata omogućuju određivanje hoće li referentni sustav mirovati ili će vršiti pravocrtno jednoliko gibanje. Bilo koji sustav može se uvjetno prepoznati kao stacionarni ako se neki drugi sustav kreće u odnosu na njega određenom brzinom.
- Jednadžbe mehanike ostaju nepromijenjene s obzirom na koordinatne transformacije u slučaju prijelaza iz jednog sustava u drugi. Moguće je opisati isti fenomen u različitim sustavima, ali se njihova fizička priroda neće promijeniti.
Rješavanje problema
Prvi primjer.
Odredite je li inercijalni referentni okvir: a) umjetni satelit Zemlja; b) dječja privlačnost.
Odgovor. U prvom slučaju ne govori se o inercijalnom referentnom okviru, budući da se satelit kreće u orbiti pod utjecajem sile gravitacija, dakle, kretanje se događa s određenim ubrzanjem.
Drugi primjer.
Sustav javljanja je čvrsto povezan s dizalom. U kojim se situacijama može nazvati inercijskim? Ako dizalo: a) padne; b) giba se jednoliko prema gore; c) brzo raste; d) ravnomjerno usmjeren prema dolje.
Odgovor. a) Tijekom slobodnog pada pojavljuje se ubrzanje, tako da referentni okvir povezan s dizalom neće biti inercijalan.
b) Kada se dizalo giba jednoliko, sustav je inercijalan.
c) Kada se giba s nekim ubrzanjem, referentni sustav se smatra inercijskim.
d) Dizalo se giba sporo i ima negativnu akceleraciju, pa se referentni sustav ne može nazvati inercijskim.

Zaključak
Tijekom svog postojanja čovječanstvo je pokušavalo razumjeti fenomene koji se događaju u prirodi. Pokušaje objasniti relativnost gibanja učinio je Galileo Galilei. Isaac Newton uspio je izvesti zakon inercije, koji se počeo koristiti kao glavni postulat pri izvođenju proračuna u mehanici.
Trenutno sustav za određivanje položaja tijela uključuje tijelo, uređaj za određivanje vremena i koordinatni sustav. Ovisno o tome kreće li se tijelo ili miruje, moguće je karakterizirati položaj određenog objekta u željenom vremenskom razdoblju.
Inercijalni referentni sustav (IRS)- referentni sustav u kojem vrijedi zakon tromosti: sve slobodnih tijela(odnosno one na koje vanjske sile ne djeluju ili je djelovanje tih sila kompenzirano) gibaju se u njima pravocrtno i jednoliko ili u njima miruju.
Neinercijalni referentni okvir- proizvoljan referentni sustav koji nije inercijalan. Svaki referentni sustav koji se giba ubrzano u odnosu na inercijalni je neinercijalan.
Prvi Newtonov zakon - postoje inercijalni referentni sustavi, tj. takvi referentni sustavi u kojima se tijelo giba jednoliko i pravocrtno ako na njega ne djeluju druga tijela. Glavna uloga ovog zakona je naglasiti da su u tim referentnim sustavima sva ubrzanja koja postižu tijela posljedica međudjelovanja tijela. Daljnji opis gibanja treba provoditi samo u inercijalnim referentnim sustavima.
Newtonov drugi zakon navodi da je razlog ubrzanja tijela međudjelovanje tijela čija je karakteristika sila. Ovaj zakon daje osnovnu jednadžbu dinamike, koja u načelu omogućuje pronalaženje zakona gibanja tijela ako su poznate sile koje na njega djeluju. Ovaj zakon se može formulirati na sljedeći način (slika 100):
ubrzanje točkastog tijela (materijalne točke) upravno je proporcionalno zbroju sila koje djeluju na tijelo, a obrnuto proporcionalno masi tijela:

Ovdje F− rezultanta sila, odnosno vektorski zbroj svih sila koje djeluju na tijelo. Na prvi pogled, jednadžba (1) je još jedan oblik zapisa definicije sile dane u prethodnom odjeljku. Međutim, to nije sasvim točno. Prvo, Newtonov zakon kaže da jednadžba (1) uključuje zbroj svih sila koje djeluju na tijelo, što nije definicija sile. Drugo, Newtonov drugi zakon jasno naglašava da je sila uzrok ubrzanja tijela, a ne obrnuto.
Newtonov treći zakon naglašava da je uzrok ubrzanja međusobno djelovanje tijela jedno na drugo. Stoga su sile koje djeluju na tijela koja međusobno djeluju karakteristike iste interakcije. S ove točke gledišta, nema ničeg iznenađujućeg u Newtonovom trećem zakonu (Sl. 101):

točkasta tijela (materijalne točke) međusobno djeluju silama jednakim po veličini i suprotnog smjera usmjerenim duž pravca koji povezuje ta tijela:
![]()
Gdje F 12 − sila koja na prvo tijelo djeluje iz drugog, a F 21 − sila koja na drugo tijelo djeluje od prvog. Očito je da su te sile iste prirode. Ovaj zakon također je generalizacija brojnih eksperimentalnih činjenica. Napomenimo da je zapravo ovaj zakon osnova za definiciju mase tijela danu u prethodnom odjeljku.
Jednadžba gibanja materijalne točke u neinercijalnom referentnom okviru može se prikazati kao :
Gdje - težina tijelo, , - ubrzanje i brzina tijela u odnosu na neinercijalni referentni sustav, - zbroj svih vanjskih sila koje djeluju na tijelo, - prijenosno ubrzanje tijelo, - Coriolisovo ubrzanje tijela, - kutna brzina rotacijskog gibanja neinercijalnog referentnog sustava oko trenutne osi koja prolazi kroz ishodište koordinata, - brzina gibanja ishodišta neinercijalnog referentnog sustava u odnosu na bilo koji inercijalni referentni sustav.
Ova se jednadžba može napisati u uobičajenom obliku Newtonov drugi zakon, ako unesete sile inercije:
U neinercijalnim referentnim sustavima nastaju inercijalne sile. Pojava ovih sila znak je neinercijalnosti referentnog sustava.
Prvi zakon mehanike, odnosno zakon inercije ( inercija- ovo je svojstvo tijela da zadrže svoju brzinu bez djelovanja drugih tijela na njega ), kako se često naziva, osnovao ga je Galileo. Ali Newton je dao strogu formulaciju ovog zakona i uvrstio ga među temeljne zakone mehanike. Zakon tromosti vrijedi za najjednostavniji slučaj gibanja – kretanje tijela na koje druga tijela ne utječu. Takva tijela nazivamo slobodnim tijelima.
Nemoguće je odgovoriti na pitanje kako se slobodna tijela kreću bez pozivanja na iskustvo. Međutim, nemoguće je izvesti niti jedan eksperiment koji bi u svom čistom obliku pokazao kako se kreće tijelo koje ni s čim ne djeluje, jer takvih tijela nema. Kako biti?
Postoji samo jedan izlaz. Potrebno je tijelu stvoriti uvjete u kojima će utjecaj vanjskih utjecaja biti sve manji i promatrati do čega to dovodi. Možete, na primjer, promatrati kretanje glatkog kamena na vodoravnoj površini nakon što mu je određena brzina. (Privlačenje kamena prema tlu uravnoteženo je djelovanjem površine na kojoj leži, a na brzinu njegova kretanja utječe samo trenje.) Lako je otkriti da što je površina glatkija, to je sporije brzina kamena će se smanjiti. Na glatkom ledu kamen klizi jako dugo, bez primjetne promjene brzine. Trenje se može svesti na najmanju moguću mjeru korištenjem zračnog jastuka - mlazova zraka koji podupiru tijelo iznad čvrste površine po kojoj se odvija kretanje. Ovaj princip se koristi u vodenom transportu (hovercraft). Na temelju takvih opažanja možemo zaključiti: kad bi površina bila savršeno glatka, tada u nedostatku otpora zraka (u vakuumu) kamen uopće ne bi mijenjao svoju brzinu. Do tog je zaključka Galileo prvi došao.
S druge strane, lako je primijetiti da se pri promjeni brzine tijela uvijek detektira utjecaj drugih tijela na njega. Iz ovoga možemo zaključiti da tijelo koje je dovoljno udaljeno od drugih tijela i zbog toga s njima ne djeluje giba se konstantnom brzinom.
Gibanje je relativno, pa ima smisla govoriti samo o kretanju tijela u odnosu na referentni okvir povezan s drugim tijelom. Odmah se postavlja pitanje hoće li se slobodno tijelo gibati konstantnom brzinom u odnosu na bilo koje drugo tijelo? Odgovor je, naravno, negativan. Dakle, ako se slobodno tijelo u odnosu na Zemlju giba pravocrtno i jednoliko, onda se u odnosu na rotirajući vrtuljak tijelo sigurno neće gibati na ovaj način.
Promatranja gibanja tijela i razmišljanja o prirodi tih gibanja dovode nas do zaključka da se slobodna tijela gibaju konstantnom brzinom, barem u odnosu na određena tijela i njima pridružene referentne okvire. Na primjer, u odnosu na Zemlju. To je glavni sadržaj zakona tromosti.
Zato Newtonov prvi zakon može se formulirati ovako:
Postoje takvi referentni sustavi u odnosu na koje tijelo (materijalna točka), u nedostatku vanjskih utjecaja na njega (ili uz njihovu međusobnu kompenzaciju), održava stanje mirovanja ili ravnomjernog pravocrtnog gibanja.
Inercijalni referentni okvir
Newtonov prvi zakon tvrdi (ovo se može eksperimentalno potvrditi s različitim stupnjevima točnosti) da inercijski sustavi stvarno postoje. Ovaj zakon mehanike stavlja inercijalne referentne sustave u poseban, privilegiran položaj.
Referentni sustavi, u kojima je zadovoljen prvi Newtonov zakon, nazivamo inercijalnim.
Inercijalni referentni sustavi- to su sustavi u odnosu na koje materijalna točka, u nedostatku vanjskih utjecaja na nju ili njihove međusobne kompenzacije, miruje ili se giba jednoliko i pravocrtno.
Postoje inercijski sustavi beskonačan skup. Referentni sustav povezan s vlakom koji se kreće stalnom brzinom duž ravnog dijela pruge također je inercijski sustav (približno), poput sustava povezanog sa Zemljom. Svi inercijski referentni sustavi tvore klasu sustava koji se međusobno gibaju jednoliko i pravocrtno. Akceleracije svakog tijela u različitim inercijskim sustavima su iste.
Kako utvrditi da je zadani referentni sustav inercijalan? To se može učiniti samo iskustvom. Promatranja pokazuju da s vrlo visok stupanj Točnost se može smatrati inercijskim referentnim sustavom kao heliocentričnim sustavom, u kojem je ishodište koordinata povezano sa Suncem, a osi su usmjerene na određene "fiksne" zvijezde. Referentni sustavi čvrsto povezani sa Zemljinom površinom, strogo govoreći, nisu inercijalni, jer se Zemlja kreće po orbiti oko Sunca i istovremeno rotira oko svoje osi. Međutim, kada se opisuju kretanja koja nemaju globalnu (tj. svjetsku) ljestvicu, referentni sustavi povezani sa Zemljom mogu se smatrati inercijalnim s dovoljnom točnošću.
Inercijalni referentni sustavi su oni koji se gibaju jednoliko i pravocrtno u odnosu na neki inercijalni referentni sustav..
Galileo je to otkrio nikakvim mehaničkim eksperimentima koji se provode unutar inercijalnog referentnog sustava ne može se utvrditi da li taj sustav miruje ili se giba jednoliko i pravocrtno. Ova izjava se zove Galilejevo načelo relativnosti ili mehaničko načelo relativnosti.
Ovo je načelo kasnije razvio A. Einstein i jedan je od postulata posebne teorije relativnosti. Inercijski referentni okviri igraju izuzetno važnu ulogu u fizici, budući da, prema Einsteinovom principu relativnosti, matematički izraz bilo koji zakon fizike ima isti izgled u svakom inercijalnom referentnom okviru. U nastavku ćemo koristiti samo inercijalne sustave (ne spominjući to svaki put).
Referentni okviri u kojima ne vrijedi prvi Newtonov zakon nazivaju se neinercijalni I.
Takvi sustavi uključuju bilo koji referentni sustav koji se ubrzano kreće u odnosu na inercijalni referentni sustav.
U Newtonovoj mehanici, zakoni međudjelovanja tijela formulirani su za klasu inercijalnih referentnih sustava.
Primjer mehaničkog eksperimenta u kojem se očituje neinercijalnost sustava povezanog sa Zemljom je ponašanje Foucaultovo njihalo. Ovo je naziv za masivnu kuglu obješenu na prilično dugačku nit koja izvodi male oscilacije oko ravnotežnog položaja. Kad bi sustav povezan sa Zemljom bio inercijalan, ravnina njihanja Foucaultovog njihala ostala bi nepromijenjena u odnosu na Zemlju. Zapravo, ravnina ljuljanja njihala rotira zbog rotacije Zemlje, a projekcija putanje njihala na Zemljinu površinu ima oblik rozete (slika 1). Riža. 2
Književnost
- Otvorena fizika 2.5 (http://college.ru/physics/)
- Fizika: Mehanika. 10. razred: Udžbenik. Za dubinsko proučavanje fizičari / M.M. Balashov, A.I. Gomonova, A.B. Dolitsky i drugi; ur. G.Ya. Myakisheva. – M.: Bustard, 2002. – 496 str.