معرفی
وظیفه اصلی رادار جمع آوری و پردازش اطلاعات مربوط به اجسام مورد کاوش است. همانطور که مشخص است در رادارهای زمینی چند موقعیتی، تمامی پردازش اطلاعات رادار به سه مرحله تقسیم می شود.
پردازش اولیه شامل تشخیص سیگنال هدف و اندازه گیری مختصات آن با کیفیت یا خطاهای مناسب است.
پردازش ثانویه تعیین پارامترهای مسیر هر هدف با استفاده از سیگنال های یک یا تعدادی از موقعیت های MPRLS، از جمله عملیات برای شناسایی علائم هدف را فراهم می کند.
در پردازش سوم پارامترهای مسیرهای هدف به دست آمده توسط دستگاه های مختلف دریافت کننده MPRLS با شناسایی مسیرها ترکیب می شوند.
بنابراین، توجه به ماهیت انواع پردازش اطلاعات راداری بسیار مرتبط است.
برای دستیابی به اهداف خود، سؤالات زیر را در نظر خواهیم گرفت:
1. پردازش اولیه اطلاعات رادار.
2. پردازش ثانویه اطلاعات راداری.
3. پردازش سوم اطلاعات رادار.
این مطالب آموزشی را می توان در منابع زیر یافت:
1. Bakulev P.A. سیستم های راداری: کتاب درسی برای دانشگاه ها. - م.:
مهندسی رادیو، 2004.
2. Belotserkovsky G.B. مبانی رادار و رادار
دستگاه ها - M.: رادیو شوروی، 1975.
پردازش اولیه اطلاعات رادار
برای خودکارسازی فرآیندهای مدیریت هوانوردی، لازم است
اطلاعات جامع و به روز شده مداوم در مورد مختصات و ویژگی های اهداف هوایی. این اطلاعات در سیستمهای کنترل خودکار (ACS) با استفاده از ابزارهای موجود در زیرسیستم جمعآوری و پردازش اطلاعات راداری (RL) یعنی: پستها و مراکز پردازش راداری، مجتمعهای گشت و هدایت رادار هوانوردی به دست میآید. ابزار اصلی کسب اطلاعات در مورد اهداف هوایی رادارها هستند. فرآیند به دست آوردن اطلاعات در مورد اجسام واقع در محدوده دید رادار نامیده می شود در حال پردازش RLI.
این پردازش امکان به دست آوردن اطلاعات مربوط به مختصات هدف، پارامترهای مسیر حرکت، زمان مکان و غیره را فراهم می کند. مجموع اطلاعات در مورد هدف معمولاً نامیده می شود. علامت. علاوه بر داده های فوق، علائم ممکن است شامل اطلاعاتی در مورد شماره هدف، ملیت، مقدار، نوع، اهمیت و غیره باشد.
سیگنال هایی که اطلاعات لازم برای اپراتور را حمل می کنند مفید نامیده می شوند، اما، به عنوان یک قاعده، آنها لزوما در معرض تداخلی هستند که اطلاعات را تحریف می کند. در این راستا در فرآیند پردازش مشکلاتی در جداسازی سیگنال های مفید و کسب اطلاعات لازم در شرایط تداخل ایجاد می شود.
پردازش اطلاعات بر اساس وجود تفاوت بین سیگنال مفید و تداخل است. کل فرآیند پردازش تصاویر رادار را می توان به سه مرحله اصلی تقسیم کرد: پردازش اولیه، ثانویه و سوم.
در صحنه پردازش اولیهتصاویر رادار هدف را شناسایی و مختصات آن را مشخص می کنند. پردازش اولیه یک به یک انجام می شود، اما اغلب در چندین جاروی محدوده مجاور انجام می شود. این برای شناسایی یک هدف و تعیین مختصات آن کافی است. بنابراین، پردازش اولیه تصاویر رادار، پردازش اطلاعات برای یک دوره بررسی راداری است. قسمت پردازش اولیه RLI شامل:
تشخیص سیگنال مفید در نویز؛
تعیین مختصات هدف؛
کدگذاری مختصات هدف؛
اختصاص اعداد به اهداف
تا همین اواخر این مشکل توسط اپراتور رادار حل می شد. اما در حال حاضر، در شرایط واقعی ردیابی بسیاری از اهداف که با سرعت بالا با استفاده از نشانگرها حرکت می کنند، یک اپراتور انسانی قادر به ارزیابی تنوع وضعیت هوا تنها با استفاده از روش بصری نیست. در این راستا، مشکل انتقال بخشی یا تمام عملکردهای یک اپراتور انسانی هنگام پردازش تصاویر رادار به ابزارهای محاسباتی که در تاسیسات کنترل خودکار هوانوردی ایجاد شده بودند، به وجود آمد.
پردازش اولیهتصویربرداری رادار با تشخیص یک سیگنال مفید در نویز آغاز می شود. این فرآیند شامل چند مرحله است:
تشخیص تک سیگنال؛
تشخیص انفجار؛
تشکیل یک بسته کامل سیگنال؛
تعیین برد تا هدف و آزیموت آن.
تمامی این مراحل با استفاده از الگوریتم های بهینه بر اساس معیارهای حداقل خطاهای تصمیم گیری و نتایج اندازه گیری پیاده سازی می شوند.
بنابراین، عملیات انجام شده در طول پردازش اولیه می تواند توسط رادار به طور مستقل انجام شود.
این اختراع به حوزه پردازش اطلاعات راداری (RAI) مربوط می شود و با توجه به اطلاعاتی که به دست می آید، قصد دارد تصویری کلی از وضعیت هوایی در حال توسعه در حوزه مسئولیت نقطه کنترل یک مجتمع ضد هوایی ایجاد کند. از چندین منبع اطلاعاتی راداری قابل دستیابی نتیجه فنی- افزایش دقت شناسایی تصویر رادار. این نتیجه با توجه به این واقعیت حاصل می شود که روش پردازش سوم تصاویر راداری در سیستم کامپیوتری مرکز کنترل شامل مراحل زیر است: دریافت پیام از منابع راداری. آوردن پیام ها به یک زمان واحد و در یک سیستم مختصات واحد. شناسایی پیام های دریافتی از منابع و تشکیل یک تصویر کلی از وضعیت هوا. تشخیص اطلاعات نادرست زمانی که تصاویر راداری از دو یا چند منبع با مشخصات فنی یکسان دریافت می شود. 2 بیمار
این اختراع به حوزه پردازش اطلاعات راداری (RL) مربوط می شود، یعنی وظیفه تشکیل یک تصویر کلی از وضعیت هوایی در حال توسعه در حوزه مسئولیت نقطه کنترل (CP) یک مجتمع ضد هوایی. با توجه به اطلاعات بدست آمده از چندین منبع داده راداری، با هدف انجام عملیات رزمی موفق بیشتر.
کار شناسایی علائم راداری دریافت شده از منابع تصویر راداری مختلف به عنوان متعلق به یک هدف بسیار پیچیده و زمان بر است. راه حل آن اغلب مبهم است و زمان زیادی می برد. در عمل، پارامترهای یک شی هوابرد (AO) توسط منابع مختلف تصویر راداری با خطاهای استاتیکی بزرگ تعیین می شود که ناشی از خطا در دستگاه های ارسال و خطا در پردازش تصویر رادار ثانویه است که بر اساس نوع منابع تعیین می شود. اطلاعاتی که از منابعی که در شرایط تداخل کار می کنند (داخلی و خارجی) اغلب حاوی گزارش هایی از اهداف نادرست است. ارزیابی و شناسایی پیامها از چنین منابعی با خطاهای بزرگی رخ میدهد و مداخله اپراتور اغلب لازم است. علاوه بر این، پیامهای منابع واقع در پایگاههای متحرک ممکن است حاوی خطاهای دینامیکی مرتبط با تعیین نادرست پارامترهای هوابرد توسط خود منبع تصویر رادار و خطا در سیستمهای تثبیت و ناوبری آن باشد. هیچ یک از روش های موجودنمی تواند به طور کامل تمام مشکلاتی را که در طول پردازش ثالثه تصاویر رادار ایجاد می شود، از بین ببرد.
یک روش شناخته شده برای پردازش سوم تصاویر رادار از چندین منبع با فاصله وجود دارد (به Kuzmin S.Z. "مبانی نظریه پردازش دیجیتال اطلاعات رادار" M.، "Soviet Radio"، 1974، ص 405 مراجعه کنید). این روش شامل مراحل زیر است:
دریافت پیامهای VO از منابع تصویر راداری و رساندن این پیامها به یک نقطه زمانی و در یک سیستم مختصات واحد.
شناسایی تقریبی جفت پیام ها و تشکیل گروه هایی از پیام های از پیش انتخاب شده که نتایج مقایسه زوجی پارامترهای مربوطه از مقادیر انحرافات مجاز (دروازه های شناسایی) تعیین شده توسط خطا در تخمین و برون یابی مختصات تجاوز نمی کند.
شناسایی دقیق پیامهای انتخابشده در گروهها بر اساس حداقل مجموع مجذور انحرافات در مختصات بین پیامهای دریافتی و تعمیمیافته.
میانگین گیری پارامترهای VO به دست آمده از چندین پیام.
پردازش مسیرهای تعمیم یافته (GT) به منظور هموارسازی آنها.
این روش امکان دستیابی به سطح قابلیت اطمینان و عدم ابهام فرآیند شناسایی تصویر راداری مورد نیاز مدرن را نمی دهد. تجهیزات نظامی. اگر نتیجه مقایسه حداقل یک جفت پارامتر دو پیام حول مقدار بارق شناسایی نوسان داشته باشد (گاهی بیشتر، گاهی کمتر)، تشکیل به جای یک یا دو OT مشاهده می شود (تشکیل هویت)، سپس یک یا دو OT مشاهده می شود. ردیابی ها در آرایه OT ظاهر می شوند (اثر ردیابی دوگانه).
نزدیکترین راه حل فنی پیشنهادی، روش پردازش تصاویر رادار در ساختار اطلاعات شبکه است سیستم خودکارکنترل (اختراع RF شماره 2461843). این روش فرض می کند:
دریافت پیام از منابع و انتخاب پیام هایی با ویژگی "هدف جدید".
آوردن پیام های انتخاب شده به یک نقطه مرجع.
انتخاب اولیه از سایر منابع پیامهایی که با پیامهای دریافتی جدید قابل شناسایی هستند، با توجه به معیار حداکثر سرعت ممکن VO و ریشه میانگین مربعات خطای اندازه گیری مختصات توسط منبع تصویر رادار.
تشکیل مقدماتی جفت پیام؛
ارزیابی دوتایی پیام ها برای شناسایی احتمالی و تشکیل یک ماتریس VO.
انتخاب و انتقال اطلاعات از ماتریس VO با توجه به درخواست مصرف کننده.
نویسندگان این روش پیشنهاد می کنند برخی از توابع پردازش تصاویر رادار را به سرور ساختار اطلاعات شبکه منتقل کنند که باعث کاهش زمان صرف شده برای پردازش تصاویر راداری می شود، اما دقت پردازش تصویر راداری را افزایش نمی دهد و دو برابر شدن را از بین نمی برد. ردیابی در آرایه OT.
تاثیر صاف کردن خطاهای استاتیکیپردازش ثانویه تصاویر راداری و انتقال اطلاعات؛
کاهش اثر شبحسازی آثار در مرزهای دروازههای شناسایی؛
کاهش نفوذ اطلاعات نادرست موجود در پیام های منابعی که در شرایط تداخل کار می کنند.
این مشکل با توجه به این واقعیت حل شده است که در روش پیشنهادی پردازش سوم تصاویر رادار در یک سیستم کامپیوتری (CS) PU، از جمله:
دریافت پیام های VO از منابع راداری؛
آوردن پیام های دریافتی به یک زمان واحد و در یک سیستم مختصات واحد.
شناسایی پیام های دریافتی از منابع به منظور ایجاد تصویری کلی از وضعیت هوا و انتقال آن به مصرف کنندگان.
آنچه جدید است این است که:
تصمیم برای شناسایی پیام ها زمانی گرفته می شود که گیت های شناسایی به مقادیر انحرافات استاندارد اجزای مختصات پیام در امتداد VO از منبع و مسیر ترکیبی در چندین چرخه تبادل برخورد کنند.
اگر مقدار انحراف استاندارد در حداقل یکی از مختصات از مقدار کل بارق شناسایی و ناحیه ابهام بیشتر شود، پیامها شناسایی نمیشوند، که مقدار آن توسط خطاهای دینامیکی سیستمهای تثبیت و ناوبری تعیین میشود. منبع رادار؛
تشخیص اطلاعات نادرست زمانی که تصاویر راداری از دو یا چند منبع با مشخصات فنی یکسان دریافت می شود، با تجزیه و تحلیل احتمال سقوط یک VO جدید در مناطق دید سایر منابع پس از دریافت پیام در یک VO جدید از یکی از منابع، امکان پذیر است. منابع و تعیین زمان انتظار برای دریافت اطلاعات این VO از منابع دیگر، اگر در طول زمان انتظار اطلاعات از منابع دیگر نرسیده باشد و اطلاعات مربوط به این VO از منبع اول متوقف شده باشد، نتیجه گیری می شود. که اطلاعات این VO در پیام های منبع اول نادرست است.
در روش پیشنهادی، هموارسازی خطاها در پردازش و ارسال تصاویر راداری با استفاده از اطلاعات روی VO در چندین چرخه تبادل به دست میآید. برای تصمیم گیری در مورد شناسایی، انحراف استاندارد (RMSD) بین مختصات متناظر VO در منبع و پیام های OT برای n چرخه تبادل محاسبه می شود:
که در آن U kj مختصات VO در پیام منبع مطابق است هدف jدر شماره گذاری منبع دریافت شده در چرخه kthتبادل،
U k - مختصات OT برون یابی شده به این لحظهزمان،
n- ثابتو بستگی به دوره به روز رسانی اطلاعات در VO دارد.
هنگامی که برای اولین بار از یک منبع برای هدف j به نقطه جمع آوری اطلاعات می رسید، در صورتی که شرایط زیر برای همه مختصات وجود داشته باشد، شناسایی با OT انجام می شود:
جایی که ΔU مقدار بارق شناسایی است.
برای مبارزه با اثر شبح، مناطق ابهام برای دروازه های شناسایی معرفی شدند. هنگامی که اطلاعات مربوط به هدف j دوباره دریافت شد، شرایط زیر بررسی می شود:
که در آن δU اندازه ناحیه ابهام است.
اندازه منطقه ابهام با اندازه خطای دینامیکی سیستم های تثبیت و ناوبری منبع تصویر رادار تعیین می شود. اگر شرط (3) برای حداقل یکی از اجزای مختصات پیام برآورده نشود، OT از بین می رود. معرفی منطقه ابهام در شرایط (3) امکان کاهش فراوانی شناسایی/تشخیص نادرست تصاویر راداری که از منابعی که دارای خطاهای دینامیکی هستند را کاهش می دهد.
هنگام دریافت اطلاعات از دو یا چند منبع با مشخصات فنی یکسان، اطلاعات نادرست قابل تشخیص است. هنگامی که یک پیام در یک VO جدید از یکی از منابع دریافت می شود، اگر تجزیه و تحلیل مناطق دید منابع، امکان دریافت اطلاعات مربوط به این VO را از منابع دیگر نشان دهد، زمان انتظار t برای این پیام تنظیم می شود تا زمانی که دریافت اطلاعات از منابع دیگر سرد شدن به درجه خطر HE بستگی دارد. از این پیام ها آرایه ای از پیام های در انتظار پردازش (MO) تشکیل می شود. اگر در طول زمان هیچ اطلاعاتی از منابع دیگر دریافت نشده باشد و اطلاعات مربوط به این VO از منبع اول متوقف شده باشد، نتیجه گیری می شود که اطلاعات مربوط به این VO در پیام های منبع اول نادرست است. بنابراین، اطلاعات نادرست وارد آرایه OT نمی شود.
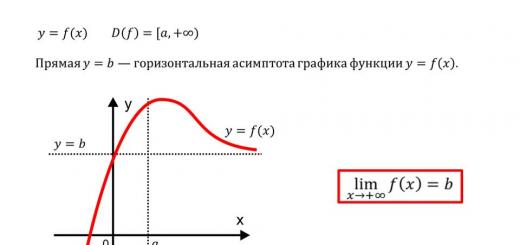
در شکل شکل 1 نموداری از اجرای روش پیشنهادی را نشان می دهد که در آن:
1 - فضای یکپارچه داده (UDS)؛
2 - منبع تصویر رادار (IST);
3، 13 - وسایل ارتباطی (CPS)؛
4 - آشکارساز اطلاعات نادرست (FID);
5 - بلوک پیش پردازش پیام (BPO);
6 - تحلیلگر امکان شناسایی با مسیرهای ترکیبی موجود (ABO).
7 - تجزیه و تحلیل امکان شناسایی (ADP)؛
8 - تحلیلگر ناحیه دید منبع (CVA);
9 - بلوک برای محاسبه زمان انتظار و ضبط در MO (BRVO).
10 - واحد تأیید مطابق با MO (BP)؛
11 - واحد حسابرسی MO (BR);
12 - واحد ردیابی آرایه OT (BS);
14 - مصرف کنندگان RLI (POT).
در شکل شکل 2 نموداری را نشان می دهد که استفاده از مناطق ابهام را هنگام شناسایی تصاویر رادار توضیح می دهد، که در آن N تعداد OT است، σ انحراف استاندارد مطابق با عبارت (1) است.
این روش پردازش سوم تصاویر راداری می تواند بر اساس سیستم کنترل کامپیوتری تک پردازنده ای اجرا شود و شامل مراحل دریافت پیام، پردازش و انتقال اطلاعات به مصرف کنندگان است. با توجه به شکل. 1، روش پیشنهادی را می توان به طور مشروط به وظایف جداگانه تقسیم کرد که به طور متوالی در بلوک های 5-12 حل می شود. هر وظیفه از فضای آدرس محلی خود استفاده می کند. یک ارتباط اطلاعاتی بین وظایف از طریق OPD 1 وجود دارد. RAM CS PU به عنوان یک OPD استفاده می شود.
در هر چرخه تبادل، تصویر رادار از IST 2 تا SRS 3 وارد BPO 5 می شود، جایی که پیام دریافتی از منبع به یک نقطه زمانی و یک سیستم مختصات واحد منتقل می شود. یک کانال تبادل اطلاعات چندگانه (MCIC) و یک کانال اترنت به عنوان SRS در CS PU استفاده می شود.
برای تصمیم گیری در مورد شناسایی تصاویر رادار، از اطلاعات میانگین در n چرخه تبادل داده با منبع استفاده می شود. پیام های داده شده برای همه VO ها که در طی n چرخه تبادل از منبع تصویر رادار تا نقطه جمع آوری اطلاعات دریافت می شوند، در قالب آرایه ای از ابعاد n×i×j ثبت می شوند که ستون های آن مجموعه ای از پارامترهای i را نشان می دهد. هدف j در شماره منبع دریافت شده در هر یک از n چرخه تبادل. آرایه های پیام های منبع در OPD 1 ذخیره می شوند. همچنین در OPD 1 آرایه ای از OT و MO وجود دارد. در هر چرخه، پیامهای تنها از یک منبع پردازش میشوند. در ABO 6، پیامهای مربوط به VOهای جدید در شمارهگذاری منبع توسط مختصات برای امکان شناسایی با OTهای موجود مطابق با شرایط (2) بررسی میشوند. اگر شرایط (2) برای یک OT معین برآورده شود، ویژگی VO که با یک منبع همراه است در OPD 1 تنظیم می شود. پیام هایی که شرایط (2) را برآورده نمی کنند، یک OT جدید در OPD 1 تشکیل می دهند.
عدم شناسایی در AVR 7 در صورتی رخ می دهد که شرط (3) برای حداقل یکی از مختصات برآورده نشود. مقدار δU در شرایط (3) جبران اثر شبحسازی ردیابی را ممکن میسازد. فرآیند شناسایی و عدم شناسایی به ترتیب با کاهش و افزایش مقدار انحراف معیار σ توسط نمودار در شکل 1 توضیح داده شده است. 2. فرآیندهای انتقال از یک OT به دو و برگشت مطابق با پیش می رود به احزاب مختلفمستطیل 15 که توسط ناحیه ابهام تشکیل شده است.
اگر دو یا چند منبع با مشخصات فنی یکسان وجود داشته باشد، فرآیند فیلتر کردن اطلاعات نادرست در OLI 4 آغاز می شود. هنگامی که اطلاعات مربوط به VO از یکی از این منابع دریافت می شود، CBA 8 امکان دریافت اطلاعات مربوط به این VO را بررسی می کند. منابع دیگر، با در نظر گرفتن منطقه دید. اگر نتیجه آزمایش در BRVO 9 مثبت باشد، بسته به درجه خطر VO، t cool محاسبه می شود و یک پیام در MO ثبت می شود. هنگامی که اطلاعات از منبع دیگری می رسد، BP 10 MO را برای امکان شناسایی یکی از پیام های ذخیره شده در MO با پیام تازه دریافت شده بررسی می کند. اگر چنین پیامی یافت شود، آن دو پیام شناسایی می شوند و یک OT جدید به آرایه OT اضافه می شود. اگر چنین پیامی از منبع دیگری دریافت نشده باشد، BR 11 یک ممیزی دائمی از پیام های MO برای انقضای t cool انجام می دهد. اگر زمان t cool منقضی شده باشد و اطلاعات مربوط به این VO از منبع اول متوقف شود، این پیام نادرست در نظر گرفته می شود و از MR حذف می شود و یک OT جدید تولید نمی شود. اگر اطلاعات مربوط به این VO همچنان از منبع اول دریافت شود، یک OT جدید تشکیل می شود.
BS 12 نظارت ثابتی بر آرایه OT انجام می دهد. اگر اطلاعات مربوط به یک OT خاص از هیچ یک از منابع همراه آن در طول زمان t منبع دریافت نشود (منبع t بستگی به نوع منبع و چرخه تبادل با منبع دارد)، OT بدون همراه است و از آرایه OT حذف می شود. .
داده های آرایه OT از طریق SRS 13 به POT 14 برای عملیات جنگی بیشتر در پدافند هوایی منتقل می شود.
روش ادعا شده برای پردازش سوم اطلاعات راداری در هواپیمای PU امکان حذف اثر مسیرهای دوگانه، شناسایی و شناسایی پیام ها از منابع با درجه بالاقابلیت اطمینان، کاهش نفوذ اطلاعات نادرست از منابع، به حداقل رساندن موارد مداخله اپراتور در خود فرآیند پردازش، و می تواند هم در پرتابگرهای هواپیمای مجتمع های ضد هوایی و هم در هواپیماهای خود مجتمع های ضد هوایی که به عنوان کار می کنند، اجرا شود. بخشی از یک گروه
روشی برای پردازش سوم اطلاعات راداری در سیستم کامپیوتری یک نقطه کنترل، از جمله دریافت پیامها بر روی اشیاء هوابرد (AO) از منابع اطلاعات راداری (RAI)، آوردن این پیامها به یک نقطه زمانی و در یک سیستم مختصات واحد. شناسایی پیامهای دریافتی از منابع به منظور تشکیل تصویری کلی از وضعیت هوا و انتقال آن به مصرفکنندگان، مشخصه آن این است که تصمیم برای شناسایی پیامها زمانی اتخاذ میشود که مقادیر انحرافات استاندارد اجزای مختص پیام در امتداد منبع هوابرد و مسیر ترکیبی در چندین چرخه مبادله به دروازههای شناسایی از منبع و مسیر ترکیبی میافتند، اگر مقدار انحراف استاندارد حداقل در امتداد یکی از مختصات از مقداری برابر با کل فراتر رود، پیامها شناسایی نمیشوند. مقدار بارق شناسایی و ناحیه ابهام، که مقدار آن توسط خطاهای دینامیکی سیستم های تثبیت و ناوبری منبع تصویر رادار تعیین می شود، با قابلیت تشخیص اطلاعات نادرست هنگام دریافت تصاویر راداری از دو یا چند منبع با همان مشخصات فنی با انجام یک پیام به هنگام دریافت یک VO جدید از یکی از منابع، تجزیه و تحلیل احتمال سقوط یک VO جدید در مناطق دید سایر منابع و تعیین زمان انتظار برای اطلاعات مربوط به این VO برای رسیدن از منابع دیگر. ، اگر در طول زمان انتظار اطلاعات سایر منابع نرسیده باشد و اطلاعات مربوط به این VO از منبع اول متوقف شود، نتیجه می گیرند که اطلاعات مربوط به این VO در پیام های منبع اول نادرست است.
اختراعات مشابه:
گروه اختراعات مربوط به سیستم های فرود هواپیما است و می تواند در اجرای مجتمع های پشتیبانی فرودگاه مورد استفاده قرار گیرد. نتیجه فنی بهدستآمده، گسترش دامنه دستگاهها برای فرود هواپیما در فرودگاه است که با استفاده از رادار حاوی: چهار آنتن (PAA)، ده ژنراتور سیگنال، دوازده میکسر و فیلتر، چهار تقویتکننده قدرت و فرکانس به دست میآید. شمارنده، پنج DAC، یک ماشین حساب ضریب و دو مدار برای ضرب و تفریق.
این اختراع برای استفاده در زمینه ساخت ابزارهای هوانوردی، به ویژه در تجهیزات ناوبری پرواز در نظر گرفته شده است هواپیما(LA). نتیجه فنی افزایش قابلیت اطمینان و ایمنی فرود هواپیما، افزایش دقت در تشکیل یک مسیر فرود معین است.
اختراع مربوط به دستگاه (10) برای تشخیص وسیله نقلیه، به ویژه هواپیما (A)، در باند (R) فرودگاه، به ویژه در باند، تاکسی وی یا منطقه پارکینگ هواپیما، که در آن این دستگاه (10) حاوی حداقل یک حسگر رادار (11) نصب شده در ناحیه نوار (R) و پیکربندی شده برای انتشار یک پرتو راداری برای اسکن منطقه تشخیص فضایی (E).
این اختراع مربوط به رادار است و می تواند در سیستم های کنترل خودکار ساخته شده بر اساس اصول ساختار اطلاعات شبکه، از نظر پردازش اطلاعات راداری (RL) از منابع - ایستگاه های راداری (RLS) و انتقال آن به مصرف کنندگان - موشک ضد هوایی استفاده شود. سیستم ها و سیستم ها
این اختراع مربوط به زمینه ناوبری هواپیما است و می تواند هنگام فرود هواپیما استفاده شود. .
این اختراع مربوط به سیستمهایی برای شناسایی، ردیابی و توزیع اهداف هوایی در سیستمهای راداری زمینی و/یا دریایی است و میتواند در سیستمهای دفاع هوایی برای محافظت از اهداف زمینی در برابر حملات هوایی استفاده شود.
این اختراع مربوط به حوزه فناوری اندازه گیری است و می توان از آن برای تعیین ارتفاع پایین پرواز هواپیما استفاده کرد. نتیجه فنی به دست آمده گسترش دامنه ارتفاعات اندازه گیری شده هواپیما است. این نتیجه با وارد کردن یک ماشه RS به ارتفاع سنج و در هر بلوک اندازه گیری محدوده شیب یک کلید دوم، خروجی متصل به ورودی کنترل یک دستگاه حساس به نور با جفت شارژ بلوک اندازه گیری دامنه شیب و ورودی اطلاعات کلید دوم به عنوان اولین ورودی بلوک اندازه گیری برد شیب عمل می کند، ورودی دوم که ورودی کنترل کلید است، ورودی سوم بلوک اندازه گیری برد شیب ورودی منبع تغذیه است که کنترل شده است و خروجی دوم هر بلوک اندازهگیری برد شیب، خروجی شمارنده پالس است و ورودی R ماشه RS به خروجی دوم بلوک اندازهگیری برد شیب اول وصل میشود، ورودی S ماشه RS به خروجی دوم بلوک اندازه گیری برد شیب دوم که ورودی سوم آن به صورت موازی با خروجی R ماشه RS با ورودی دوم بلوک اندازه گیری برد شیب اول وصل شده است که ورودی سوم آن به موازات ورودی S ماشه RS به ورودی دوم محدوده بلوک اندازه گیری شیب دوم. 2 بیمار
این اختراع به روش و وسیله ای برای تشخیص چرخ چرخان وسیله نقلیه ای که در امتداد جاده در جهت حرکت در حال حرکت است و چرخ های آن حداقل تا حدی در کنار باز است، مربوط می شود. نتیجه فنی افزایش قابلیت اطمینان در تشخیص چرخ چرخان خودرو است. روشی برای تشخیص چرخ دوار (4) وسیله نقلیه (1) پیشنهاد شده است که در امتداد جاده (2) در جهت حرکت (3) در حال حرکت است و چرخهای (4) آن حداقل تا حدی باز هستند. سمت، شامل مراحل: ارسال یک پرتو اندازه گیری الکترومغناطیسی (9) با مشخصه زمانی مشخص فرکانس آن به ناحیه اول بالای جاده (2) در جهت مایل به عمود (V) و عمود یا مایل بر جهت حرکت (3)، دریافت پرتو اندازه گیری منعکس شده (9) و ثبت مشخصه زمانی فرکانس های آن در رابطه با یک مشخصه شناخته شده به عنوان مشخصه (20) مخلوطی از فرکانس های دریافتی و تشخیص باند فرکانس (22) که به طور مداوم در حال افزایش است. یا در طی یک دوره زمانی مشخصه (20) مخلوطی از فرکانس های دریافتی به صورت چرخ کاهش می یابد (4). 2 n. و 13 حقوق f-ly, 9 بیمار.
این اختراع مربوط به روش و وسیله ای برای تشخیص چرخ چرخان وسیله نقلیه ای است که در امتداد جاده در جهت حرکت حرکت می کند و چرخ های آن حداقل تا حدی از پهلو باز است. نتیجه فنی افزایش قابلیت اطمینان در تشخیص چرخ چرخان خودرو است. روشی برای تشخیص چرخ های (4) وسیله نقلیه (1) پیشنهاد شده است که در امتداد جاده (2) در جهت حرکت (3) حرکت می کند و چرخ های (4) آن حداقل تا حدی در کنار باز هستند. از جمله: تابش الکترومغناطیسی از گلبرگ (15) الگوهای جهتی پرتو اندازه گیری با مشخصه زمانی مشخص فرکانس از ناحیه کنار جاده (2) تا ناحیه جاده (2) و با تمایل نسبت به جهت (3) حرکت؛ دریافت یک لوب (15) از الگوی جهت پرتو اندازه گیری منعکس شده توسط وسیله نقلیه عبوری (1)، و ثبت مشخصه زمانی (F) تمام فرکانس های تابش منعکس شده نسبت به مشخصه شناخته شده مشخص شده. و به عنوان یک چرخ بزرگ کننده (A2) یک فرکانس در مشخصه ثبت شده (F) که در طول عبور (Tr) وسیله نقلیه ظاهر می شود، تشخیص می دهد، که گشاد شدن بیشتر از مقدار گسترش از پیش تعیین شده (S) است. 2 n. و 2 حقوق f-ly, 9 بیمار.
این اختراع مربوط به حوزه فناوری رادار است و می تواند در ساخت سیستم های امداد-متری راداری که برای تعیین مکان هواپیما با استفاده از امواج رادیویی طراحی شده اند، استفاده شود. نتیجه فنی به دست آمده از اختراع افزایش محرمانه بودن و سرعت روش ناوبری هواپیما و همچنین دقت در تعیین مکان هواپیما هنگام حرکت بر روی یک بخش اندازه گیری است. در روش ناوبری خودمختار یک هواپیما، از جمله تعیین برد شیب هواپیما تا سطح زمینکه شامل انتشار امواج رادیویی به شکل پرتوهای متعدد و دریافت بعدی امواج رادیویی منعکس شده در امتداد این پرتوها است، امواج رادیویی همزمان در همان فرکانس حامل به شکل توالی پالسهای رادیویی منتشر میشوند. فازهای اولیهکه توسط M-توالی های متعامد به یکدیگر مدوله می شوند. امواج رادیویی منعکس شده به پرتوها تقسیم می شوند و فواصل شیب هواپیما تا سطح زمین با استفاده از روش همبستگی با استفاده از تعدیل کردن توالی M به عنوان توابع پشتیبانی یا با روش فیلتر همسان با استفاده از کدهایی که دنباله های M تعدیل کننده را به عنوان ضرایب وزنی تشکیل می دهند تعیین می شود. . 10 بیمار
این اختراع مربوط به سیستم های کنترل است. روش تولید سیگنال کنترل برای ردیابی یک هدف به این صورت است که سیگنال کنترل بر اساس قانون بر اساس ماتریس های دینامیکی اتصالات داخلی سیستم ها، بردار تعمیم یافته وضعیت سیستم و بردار سیگنال های کنترل تولید می شود. سیگنال کنترل شامل یک مجموع وزنی از مختصات فاز و مشتقات آنها است که در سیگنال کنترل با ضرایب متناسب بسته به اختلاف بین خواص دینامیکی ماتریس های دینامیکی اتصالات داخلی سیستم ها گنجانده شده است. سیستم تولید سیگنال کنترل برای جهت یاب اینرسی شامل یک متر، فیلتر، تقویت کننده، جمع کننده و عنصر کنترل است. علاوه بر این، تقویتکنندههایی با ضرایب بسته به اختلاف ماتریس و فیلترهایی برای مشتقات بالای مختصات ردیابی شده معرفی شدهاند. مقادیر عدم تطابق مشتق به جمع کننده وارد می شود. شاخص های بهره وری سیستم بهبود یافته است. 2 n.p. f-ly, 6 بیمار.
این اختراع به روشی برای تشخیص چرخ چرخان یک وسیله نقلیه مربوط می شود. روشی برای تشخیص چرخ دوار (1) یک وسیله نقلیه (2) پیشنهاد شده است که مشخصه آن این است که چرخ (1) با تخمین جابجایی فرکانس داپلر منعکس شده توسط چرخ (1) و پرتو اندازه گیری (6) برگشتی تشخیص داده می شود. با شیفت داپلر، ساطع شده توسط واحد آشکارساز (5)، که از آن گذشته است وسیله نقلیه(2). در یک موقعیت نسبی (R)، نسبت به چرخ (1)، وسیله نقلیه (2) دارای یک دستگاه سواری (15) است که قادر به برقراری ارتباط رادیویی (23) با یک فرستنده گیرنده (24) نصب شده در یک موقعیت شناخته شده است. ل) در واحد آشکارساز. این روش شامل: اندازه گیری جهت (δ) و فاصله (z) تا دستگاه روی برد (15) از فرستنده گیرنده (24) از طریق ارتباط رادیویی (23) بین دستگاه های مشخص شده و کنترل جهت تابش (δ, β). ، γ) یا موقعیت (A) پرتو تابش اندازه گیری (6) با توجه به جهت اندازه گیری شده (δ) و فاصله (z) و با در نظر گرفتن موقعیت نسبی فوق (R) و موقعیت (L). موقعیت نسبی (R) در واحد داخلی (15) ذخیره میشود و از طریق ارتباط رادیویی (23) از واحد داخلی (15) خوانده میشود تا در کنترل فوق در نظر گرفته شود. ایجاد یک روش بهبود یافته برای تشخیص چرخ ها بر اساس اندازه گیری های داپلر به دست آمده است. 14 حقوق f-ly, 4 ill., 1 جدول.
این اختراع مربوط به رادار است و می تواند در سیستم های کنترل خودکار ساخته شده بر اساس اصول ساختار اطلاعات شبکه، از نظر انتقال و تبادل اطلاعات راداری (RAI)، در یک سیستم خودکار برای پردازش و تبادل اطلاعات راداری (ASOO) استفاده شود. RLI). نتیجه فنی به دست آمده کاهش زمان لازم برای عبور اطلاعات رادار از شبکه سیستم با حذف اطلاعات نامربوط، آسیب دیده، ناخواسته و همچنین حذف انتقال اطلاعات مکرر و همچنین بهبود شاخص های کیفیت اطلاعات و کاهش نیازمندی ها است. برای پهنای باندخطوط ارتباطی به دلیل افزایش سرعت پردازش تصویر راداری روی سرورها. نتایج فنی مشخص شده به این دلیل به دست میآید که منابع اطلاعاتی راداری تمام اطلاعات راداری را از طریق دروازههای اطلاعات تلهکد به سرورها ارائه میکنند، سرورها اطلاعات راداری ورودی را پردازش میکنند، مصرفکنندگان در صورت درخواست اطلاعات راداری را دریافت میکنند و قبلاً به سرورها اطلاع دادهاند که چه اطلاعاتی را میخواهند. مایل به دریافت هستند و در صورتی که اطلاعات درخواستی در دسترس نباشد، سرورها آن را از شبکه کامپیوتری از سرورهای دیگر دریافت کرده و بین مصرف کنندگان توزیع می کنند، در حالی که داده ها در ابتدا بر اساس معیار طول عمر شبکه و آدرس منبع، پس از آن مسیریابی و فیلتر می شوند. که فیلتر اضافی و الگوریتم های مسیریابی تصویر رادار پیاده سازی شده است. در این حالت، گره های شبکه در یک شبکه مجازی همتا به همتا متحد می شوند. 1 بیمار
این اختراع به حوزه پردازش اطلاعات راداری مربوط می شود و با توجه به اطلاعاتی که از چندین رادار به دست می آید، در نظر گرفته شده است تا تصویری کلی از وضعیت هوایی در حال توسعه در منطقه مسئولیت نقطه کنترل یک مجتمع ضد هوایی ایجاد کند. منابع تصویر نتیجه فنی به دست آمده افزایش دقت شناسایی تصویر رادار است. این نتیجه با توجه به این واقعیت حاصل می شود که روش پردازش سوم تصاویر راداری در سیستم کامپیوتری مرکز کنترل شامل مراحل زیر است: دریافت پیام از منابع راداری. آوردن پیام ها به یک زمان واحد و در یک سیستم مختصات واحد. شناسایی پیام های دریافتی از منابع و تشکیل یک تصویر کلی از وضعیت هوا. تشخیص اطلاعات نادرست زمانی که تصاویر راداری از دو یا چند منبع با مشخصات فنی یکسان دریافت می شود. 2 بیمار
پردازش اطلاعات رادار- فرآیند آوردن اطلاعات دریافتی از رادار به شکلی مناسب برای انتقال بیشتر.
در ابتدا، پردازش اطلاعات رادار توسط اپراتور رادار انجام شد که وضعیت هوا را بر روی صفحه نمایش نشانگر نمایش همه جانبه (PVI) مشاهده کرد. در ساده ترین حالت، اطلاعات خروجی دستگاه گیرنده رادار روی ICO نمایش داده می شد و فسفر ICO (که یک لوله پرتو کاتدی CRT با اسکن شعاعی-دایره ای، RCR بود) یکپارچه سازی اطلاعات رادار را انجام می داد. . با توسعه ابزارهای محاسباتی، اضافه کردن عملکرد ردیابی نیمه خودکار (نیمه خودکار) و متعاقباً ضبط خودکار (اتوماتیک) امکان پذیر شد. در یک ماشین نیمه اتوماتیک، اپراتور به صورت دستی مسیر هدف را گره می زد و سپس دستگاه اطلاعات را به طور مستقل و تنها در صورت لزوم پردازش می کرد و از اپراتور کمک می خواست. در دستگاه اتوماتیک، دستگاه به طور مستقل نه تنها ردیابی، بلکه راه اندازی مسیرها را نیز انجام می دهد. با این حال، قابلیت های ابزارهای محاسباتی به ما اجازه نمی دهد که اپراتور را به طور کامل رها کنیم - در یک محیط نویز پیچیده، الگوریتم های موجود به طور قابل توجهی عملکرد خود را تا حد ناکارآمدی کاهش می دهند.
پردازش اولیه
پردازش یک سیگنال اکو (در رادارهای فعال با پاسخ غیرفعال) یا یک پاسخ فعال (در سیستمهای درخواست پاسخ فعال، SAZO، شناسایی دوست یا دشمن) به منظور جداسازی اطلاعات مفیددر پس زمینه تداخل طبیعی و مصنوعی
ورودی: سیگنال از گیرنده، رادار سیستم تغذیه آنتن (AFS).
خروجی: موقعیت اهداف، آنها اندازه زاویه ای، آزیموت و فاصله.
انجام: توسط یک دستگاه پردازش اولیه (PDU) واقع در رادار.
پردازش ثانویه
طراحی شده برای ایجاد ردیابی هدف بر اساس داده های UPO. بر اساس داده های پردازش اولیه، موقعیت اهداف برون یابی می شود - تعیین مسیر، سرعت و ارتفاع آنها و پیش بینی موقعیت هدف در دوره بررسی بعدی. در فرآیند پردازش ثانویه، پایداری ردیابی هدف افزایش مییابد (هدف پس از ناپدید شدن هدف برای چندین دوره مشاهده تعمیم داده میشود، که ردیابی اهداف با علامت ناپایدار را ممکن میسازد. همچنین اهداف و مسیرهای نادرست را دور میاندازد. در ابتدا، در در لحظه ظهور، پردازش ثانویه با استفاده از مجموعه ابزارهای اتوماسیون برای یک سیستم کنترل خودکار (KSA ACS) انجام شد، رادارهای مدرن به طور مستقل این پردازش را انجام می دهند و در صورت لزوم، پردازش می تواند به دستور اپراتور آن به KSA منتقل شود. .
ورودی: اهداف به دست آمده از پردازش اولیه.
خروجی: تعداد هدف، مختصات، سرعت، مسیر، ارتفاع و همچنین سایر مشخصات بسته به رادار. نتایج پردازش ثانویه برای صدور اطلاعات به مصرف کنندگان (نیروهای موشکی ضد هوایی و هواپیماهای جنگنده) مناسب است و همچنین برای کنترل سایر تجهیزات راداری مانند ارتفاع سنج رادیویی استفاده می شود.
انجام شده: توسط اپراتور پشتیبانی به صورت دستی. KSA ASU یا PORI - یک نقطه پردازش اطلاعات راداری (در سطح شرکت رادار) نیمه و خودکار.
پردازش سوم
ماهیت: مقایسه اطلاعات دریافت شده از چندین منبع.
ورودی: مسیرهای هدف به دست آمده در نتیجه پردازش ثانویه از منابع مختلف راداری، مختصات منابع راداری و ویژگی های آنها.
با استفاده از روش های ریاضی، اطلاعات شفاف و تکمیل می شود، کامل بودن داده ها و پایداری ردیابی هدف افزایش می یابد و کار گروهی از تجهیزات راداری بهینه می شود تا با کمترین مصرف منابع، تصاویر راداری با حداکثر کیفیت به دست آید. شرایط و وسایل مورد استفاده را در نظر بگیرید. خروجی: ردیابی هدف با در نظر گرفتن انتقال هدف از یک رادار به رادار دیگر، دقت منابع مختلف و غیره به دست آمده است.
انجام شده: در سطح گردان فنی رادیو و بالاتر. به صورت دستی، نیمه اتوماتیک یا خودکار توسط افسر ACS گروه کنترل رزمی یا به دستور او توسط اپراتور.
نظری در مورد مقاله پردازش اطلاعات رادار بنویسید
گزیده ای که پردازش اطلاعات رادار را توصیف می کند
او هیچکس را نمیشناخت، و علیرغم یونیفرم محافظ هوشمندش، همه اینها را میشناخت افراد برتربه نظر میرسید که در خیابانها، با کالسکههای هوشمند، ستونها، روبانها و دستورات، درباریان و نظامیان، چنان بالای سر او، افسر نگهبان، ایستاده بودند که نه تنها نمیخواستند، بلکه نمیتوانستند وجود او را تشخیص دهند. در محل فرمانده کل کوتوزوف، جایی که او از بولکونسکی پرسید، همه این آجودان و حتی دستور دهندگان به او نگاه می کردند که انگار می خواستند او را متقاعد کنند که افسران زیادی مانند او در اینجا آویزان هستند و همه آنها بسیار هستند. خسته از آنها با وجود این، یا بهتر بگوییم در نتیجه، روز بعد، پانزدهم، پس از ناهار دوباره به اولموتز رفت و با ورود به خانه ای که کوتوزوف اشغال کرده بود، از بولکونسکی پرسید. شاهزاده آندری در خانه بود و بوریس را به سالن بزرگی هدایت کردند که احتمالاً قبلاً در آن رقصیده بودند ، اما اکنون پنج تخت ، مبلمان مختلف وجود دارد: یک میز ، صندلی و یک کلاویکورد. یکی از آجودان، نزدیکتر به در، با لباس ایرانی، پشت میز نشست و نوشت. دیگری، نسویتسکی قرمز و چاق، روی تخت دراز کشیده بود، با دستانش زیر سرش، با افسری که کنارش نشسته بود می خندید. سومی والس وینی را روی کلاویکورد نواخت، چهارمی روی کلاویکورد دراز کشید و با او آواز خواند. بولکونسکی آنجا نبود. هیچ یک از این آقایان با توجه به بوریس، موضع خود را تغییر ندادند. کسی که نوشت و بوریس خطابش کرد، با ناراحتی برگشت و به او گفت که بولکونسکی در حال انجام وظیفه است و اگر لازم است او را ببیند باید از در به سمت چپ برود و به اتاق پذیرایی برود. بوریس از او تشکر کرد و به سمت پذیرایی رفت. حدود ده افسر و ژنرال در اتاق پذیرایی بودند.در حالی که بوریس آمد، شاهزاده آندری که چشمانش را تحقیر آمیز ریز می کرد (با آن نگاه خاص خستگی مودبانه که به وضوح می گوید اگر وظیفه من نبود، یک دقیقه با شما صحبت نمی کردم)، به سخنان ژنرال پیر روسی گوش داد. دستور داد، که تقریباً روی نوک پا، با توجه، با حالت غیراخلاقی سربازی در صورت بنفش خود، چیزی را به شاهزاده آندری گزارش کرد.
به ژنرال با لهجه فرانسوی به روسی که وقتی می خواست تحقیرآمیز صحبت کند به ژنرال گفت: "خیلی خوب است، اگر لطفا صبر کنید." او برای گوش دادن به چیز دیگری) ، شاهزاده آندری با لبخندی شاد و سر به طرف او تکان داد و رو به بوریس کرد.
بوریس در آن لحظه قبلاً آنچه را که قبلاً پیش بینی کرده بود به وضوح درک کرده بود ، یعنی اینکه در ارتش ، علاوه بر تبعیت و نظم و انضباط که در مقررات نوشته شده بود و در هنگ شناخته شده بود ، و او می دانست ، دیگری نیز وجود دارد. فرمانروایی مهم تر، آن چیزی که این ژنرال کشیده و ارغوانی را وادار کرد که با احترام منتظر بماند، در حالی که کاپیتان، شاهزاده آندری، برای لذت خود، صحبت با پرچمدار دروبتسکی را راحت تر می دید. بوریس بیش از هر زمان دیگری تصمیم گرفت از این پس نه بر اساس آنچه در آیین نامه نوشته شده است، بلکه بر اساس این تابعیت نانوشته خدمت کند. او اکنون احساس می کرد که فقط به دلیل این که به شاهزاده آندری توصیه شده بود ، بلافاصله از ژنرال برتری یافته بود ، که در موارد دیگر ، در جبهه ، می توانست او را نابود کند ، پرچمدار نگهبان. شاهزاده آندری به سمت او آمد و دست او را گرفت.
حیف که دیروز مرا پیدا نکردی. تمام روز را با آلمانیها درگیر کردم. ما با Weyrother رفتیم تا وضعیت را بررسی کنیم. این که چگونه آلمانی ها از دقت مراقبت می کنند پایانی ندارد!
بوریس لبخندی زد، گویی متوجه شده بود که شاهزاده آندری به چه چیزهایی اشاره می کند. اما برای اولین بار نام Weyrother و حتی کلمه disposition را شنید.
-خب عزیزم هنوزم میخوای آجودان بشی؟ تو این مدت به تو فکر کردم
بوریس که به دلایلی ناخواسته سرخ شده بود، گفت: «بله، فکر کردم، تا از فرمانده کل بپرسم. نامه ای از شاهزاده کوراگین در مورد من به او ارسال شد. او با عذرخواهی اضافه کرد: «میخواستم بپرسم فقط به این دلیل که میترسم نگهبانها وارد عمل نشوند.»
- خوب! خوب! شاهزاده آندری گفت: "ما در مورد همه چیز صحبت خواهیم کرد ، فقط اجازه دهید من در مورد این آقا گزارش دهم و من متعلق به شما هستم."
هدف رادار و آرپا
این رادار برای شناسایی اجسام راداری در محدوده تشخیص طراحی شده است. مورد استفاده در: شرایط دید، ناوبری ساحلی، شرایط ناوبری پیچیده.
اصل عملیات رادار
رادار از 2 قسمت تشکیل شده است: یک اسکنر (دستگاه چرخان آنتن، فرستنده گیرنده) و یک نشانگر، *دستگاه نظارت بر تشعشع.
نمودار ساختاری و عملکردی رادار
ویژگی های فرآیندهای تابش، انتشار، بازتاب و دریافت امواج رادیویی.
خواص بازتابی یک جسم به شکل، زاویه، مواد و غیره بستگی دارد.
اصل اندازه گیری برد و جهت در رادار ناوبری
محدوده: حلقه های ثابت، حلقه متحرک، دید الکترونیکی، مکان نما.
جهت: دستگاه دید مکانیکی و الکترونیکی جهت خوانی، زاویه خوانی (KU، IP)
جهت گیری تصویر در رادار و نشانه های حرکت ARPA "OD" ( حرکت نسبی) و "ID" (حرکت واقعی)؛ ویژگی های شکل گیری و استفاده؛ تصحیح دوره و داده های سرعت وارد شده در طول ID به نشانگر از GK و LAG.
OD - تمام حرکات نسبت به کشتی من (کشتی در مرکز صفحه)
شناسه - ما رادار را طوری دنبال می کنیم که انگار نقشه ای را دنبال می کنیم.
جهت گیری: کورس سربالا - نفوذ انحراف، شمال به بالا - هماهنگی با بدنه اصلی، کورس صعودی تثبیت شده.
مشخصات فنی اصلی رادار (قدرت پالس، طول موج تابش، مدت پالس های ساطع شده، دوره تکرار پالس های ساطع شده، عرض الگوی تشعشع آنتن (APP) در سطوح افقی و عمودی، حساسیت رادار، قطر و قطر کاری صفحه نمایش ، قطر نقطه رسم.
قدرت پالس قدرتی است که در هوا منتشر می شود. در رادارهای مدرن از واحد تا صدها کیلووات متغیر است. بر اساس نوع مگنترون، طول مسیر موج و نوع آنتن تعیین می شود.
طول موج تشعشع - باند x سه سانتی متر (9 گیگاهرتز)، باند s ده سانتی متر (3 گیگاهرتز).
دوره ردیابی دوره ای است که از طریق آن فرستنده انرژی را به فضا می تاباند که به مقیاس برد بستگی دارد.
عرض الگوی تابش افقی است - حدود 30 درجه، عمودی - 1.5 درجه.
حساسیت - توانایی تشخیص سیگنال های کوچک (10 V -13 V).
قطر و قطر صفحه کار - 180، 250، 320 میلی متر
قطر نقطه کشش - 0.1 میلی متر
مشخصات عملیاتی اولیه رادار ناوبری (خطاهای اندازه گیری مختصات، حداقل برد، حداقل برد تشخیص، منطقه مرده، بخش های سایه در صفحه افقی و عمودی، حداکثر برد، حداکثر برد تشخیص شی، تأثیر خمیدگی زمین، نفوذ زیرین سطح، وضوح برد ایستگاه، وضوح جهت.
خطاهای اندازه گیری به مقیاس برد، تنظیمات رادار، مدت زمان پالس پروب، 1٪ بستگی دارد.
حداقل محدوده: الف) عمل - ما فاصله ای را که از آن سیگنال های منعکس شده روی ورودی شروع به کار می کنند به حداقل می رسانیم، این با مدت زمان پالس پروب تعیین می شود (1 μs = 150 متر => هیچ چیز در 150 متر قابل مشاهده نیست). ب) تشخیص - مشخصه ای که مدت زمان پالس پروب به اضافه زمان بازیابی حساسیت را در نظر می گیرد.
منطقه مرده منطقه ای است که با ارتفاع نصب آنتن و عرض الگوی تابش تعیین می شود.
حداکثر برد: الف) عمل - محدوده محدود شده توسط دوره تکرار پالس، که به قدرت و بهره آنتن بستگی دارد. ب) تشخیص - بستگی به ارتفاع نصب آنتن، نوع شکست، مشخصات جسم تحت تابش، طول امواج مورچه ای مسیر و تنظیمات رادار، یک مشخصه احتمالی است.
تأثیر خمیدگی زمین - D = k * (ریشه (h1) + ریشه (h2))
نفوذ سطح زیرین - سطح زیرین بهره را از 0 تا 16 برابر تغییر می دهد. در صفحه رادار، این منجر به تغییر سینوسی در روشنایی سیگنال بسته به تغییر فاصله می شود.
وضوح ایستگاه: الف) در برد - این حداقل فاصله بین 2 نقطه است که امکان مشاهده اهداف را به طور جداگانه فراهم می کند. به مدت زمان پالس و کیفیت تنظیمات ایستگاه بستگی دارد. 15-20 متر است. ب) در جهت - فاصله بین 2 هدف مساوی، زمانی که آنها به طور جداگانه مشاهده می شوند. به پهنای نمودارها بستگی دارد به عنوان مثال.
الزامات IMO برای رادارهای ناوبری (نمایش اطلاعات، مجموعه مقیاس های محدوده نشانگر، نشان دادن مقیاس های برد، نوع اطلاعات نمایش داده شده در ناحیه موثر تصویر رادار، تصویر چند رنگ روی صفحه، تصویر نقشه الکترونیکی سیستم).
محدوده تشخیص: ساحل 15 متر، 5000 تن 7 متر، 10 متر 3 متر، شناور 2 متر. حداقل برد تشخیص 50 متر است. نشانگر 180, 250, 320mm. رنگارنگ مجاز است، اما تصویر اصلی باید با رنگ ها همرنگ باشد. مقیاس: 0.25nm، 0.5nm، 0.75nm، 1.5nm، 3.0nm، 6.0nm، 12.0nm، 24nm، 48nm و 96nm. گام 10-15 درجه نباید منجر به بدتر شدن تصویر شود. سرعت چرخش آنتن 20 بار در دقیقه حالت ID و OD. تصویر ECDIS از سال 2012، محتویات: خط گرفتن، کانتور عمق ایمنی برای کشتی شخصی، خطرات ناوبری.
تداخل با نظارت رادار، ویژگی ها و شناسایی آنها. (گیرنده و نویز اتمسفر، تداخل رادارهای همسایه ("تداخل غیرهمزمان")، علائم برد کاذب، حالت لرزش، تداخل ناشی از بازتاب های متعدد و لوب های جانبی، "محلی ها"، تداخل از سطوح ناهموار دریا، کنترل موقت بهره خودکار ( TAG))، تداخل سازندهای آبوهواشناسی؛ زنجیره ثابت زمانی کوچک (STC). روشهای بهینه برای راهاندازی و استفاده از TVG و STC.)
تداخل دریا: شدت آن با دور شدن از کشتی کاهش می یابد، روی صفحه نمایش 3-4M شعله در اطراف وجود دارد، در فاصله 1-2M تقریبا یک شعله وجود دارد. برای مبارزه با تداخل، از VARU (!3 کاراکتر) استفاده کنید. دکمه db طوری پیکربندی شده است که آثاری از تداخل روی صفحه وجود داشته باشد که روشنایی آن کمتر از روشنایی بالقوه است.
تداخل سازندهای آب و هواشناسی: آنها می توانند از هر سازندهای آب و هواشناسی بیایند، آنها با دستگیره های MPV (زمان حرکت کوتاه) مبارزه می کنند - جبران تداخل. یا از محدوده 10 سانتی متری استفاده می شود.
صدای گیرنده و اتمسفر: انفجارهای آشفته روی صفحه وجود دارد، شدت آن به سطح بهره بستگی دارد، 2-3 انفجار در هر 1 سانتی متر مربع را با دستگیره دانه انتخاب کنید.
تداخل رادار همسایه: بال.
تداخل سنکرون: مارپیچی.
پالس سنکرون: بخش در جهت منبع.
اهداف کاذب: الف) بازتاب مجدد (انعکاس از یک لوله)، ب) بازتاب مجدد از موانع (مشاهده طولانی مدت)، ج) به دلیل بازتاب چندگانه (زنجیره ای از اهداف)، د) به دلیل لوب های جانبی قوس نقاط)، ه) به دلیل کابل های حامل جریان، و) به دلیل انکسار فوق العاده، ز) تداخل عمدی ایجاد شده.
دستگاه های ترسیم خودکار رادار (ARPA). (دستیابی به هدف برای ردیابی خودکار، گزینه های دستی و خودکار، معیارهای کسب.)
از ARPA به عنوان: - رسانه ای که ایمنی ناوبری را در مناطق با ناوبری شدید، نزدیک به ساحل، در مناطق ترافیکی، باریکه ها، راه ها افزایش می دهد، - یک حسگر ناوبری لازم برای ناوبری برای ارزیابی صحیح وضعیت و تصمیم گیری آگاهانه استفاده می شود. برای واگرایی
دنباله اقدامات: به دست آوردن اطلاعات، تشخیص یک شی، اندازه گیری مختصات، تعیین پارامترهای حرکت هدف، تعیین پارامترهای جلسه، ارزیابی وضعیت جلسه، برنامه ریزی مانور، اجرای مانور و کنترل آن.
اکتساب: دستی و خودکار (برای بررسی در دسترس بودن، از معیار اکتساب استفاده می شود - تعداد شناسایی هدف متوالی مداوم در طول بررسی های متوالی - 3x3، 5x5، 15x15).
ARPA. پردازش اولیه سیگنالهای رادار (کوانتیزه کردن، فیلتر کردن، تشخیص سیگنالهای مفید، تشخیص و شناسایی (طبقهبندی) اشیاء، اندازهگیری مختصات شی، ویژگیهای پیادهسازی، معیارهای اکتساب مورد استفاده).
1) تبدیل سیگنال به شکل دیجیتال (کوانتیزاسیون، نمونه برداری، رمزگذاری)، 2) فیلتر درون پالس، فیلتر بین ناظر، 3) تشخیص سیگنال مفید، 4) جذب هدف برای ردیابی، 5) ردیابی هدف.
ARPA. پردازش ثانویه اطلاعات رادار: فرم
1) هموارسازی مختصات، 2) توسعه جفت حرکت و رویکرد، 3) ارزیابی وضعیت جلسه، 4) برنامه ریزی و اجرای مانور.
هنگام توسعه یک فرم، تاخیر: 1 دقیقه - زمان پردازش برای اطلاعات اولیه، 3 دقیقه - زمان برای توسعه حداکثر دقت. دقت: بلبرینگ 0.5 و 1.5 درجه، مسیر هدف 3 درجه، سرعت 1kt، Dcr 1/4M، Tcr 1min.
پردازش اطلاعات رادار- فرآیند آوردن اطلاعات دریافتی از رادار به شکلی مناسب برای انتقال بیشتر.
در ابتدا پردازش اطلاعات رادار توسط یک سرباز (اپراتور اسکورت) که پشت نشانگر رادار نشسته بود انجام می شد. در حال حاضر، به صورت خودکار و نیمه اتوماتیک انجام می شود و بهره وری اپراتور را افزایش می دهد.
پردازش اولیه
ماهیت: شناسایی اهداف در پس زمینه سر و صدا و تداخل، شناسایی "دوست یا دشمن"
ورودی: سیگنال رادار
خروجی: موقعیت اهداف، اندازه زاویه ای، آزیموت و فاصله آنها.
انجام شده: توسط یک دستگاه پردازش اولیه واقع در رادار. قبلا - نقاط پردازش اطلاعات رادار.
پردازش ثانویه
ماهیت: شناسایی اهداف در طی چندین چرخه اسکن رادار. محاسبه جهت و سرعت؛ مبارزه با خطاهای پردازش اولیه - اهداف دوگانه، انفجارهای تصادفی و ناپدید شدن موقت اهداف.
ورودی: اهداف به دست آمده از پردازش اولیه.
انجام شده: توسط اپراتور پشتیبانی به صورت دستی. یک نقطه پردازش اطلاعات راداری (در سطح شرکت رادار) نیمه و خودکار.
پردازش سوم
ماهیت: مقایسه اطلاعات به دست آمده از چندین منبع.
ورودی: آثار هدف به دست آمده در نتیجه پردازش ثانویه. مختصات رادار
خروجی: ردیابی هدف با در نظر گرفتن انتقال هدف از یک رادار به رادار دیگر، دقت منابع مختلف و غیره به دست آمده است.
انجام شده: در سطح گردان فنی رادیو و بالاتر. به صورت دستی (توسط اپراتور تبلت)، نیمه اتوماتیک یا خودکار توسط یک سیستم کنترل خودکار.
بنیاد ویکی مدیا 2010.
ببینید «پردازش اطلاعات رادار» در فرهنگهای دیگر چیست:
ORLY- پردازش ارتباطات اطلاعاتی راداری ... فرهنگ اختصارات و اختصارات
ویکیپدیا مقالاتی درباره افراد دیگر با این نام خانوادگی دارد، بننسون را ببینید. زالمان میخایلوویچ بننسون تاریخ تولد ... ویکی پدیا
این اصطلاح معانی دیگری دارد، به Spark مراجعه کنید. مختصات: 47°50′16″ شمالی. w 35 درجه 13'47 اینچ شرقی. d. / 47.837778° n. w 35.229722 درجه شرقی. د ... ویکی پدیا
موشک کروز ضد کشتی P-35 (P-6)- 1964 در 17 آگوست 1956، فرمان CM CCCH شماره 1149-592 مبنی بر آغاز توسعه موشک های کروز ضد کشتی P 6 و P 35 صادر شد. هر دو موشک در OKB 52 طراحی شده بودند و تفاوت کمی با یکدیگر داشتند. P 6 برای زیر آب در نظر گرفته شده بود... ... دایره المعارف نظامی
مجموعه ای از اقدامات برای به دست آوردن و پردازش داده ها در مورد یک دشمن واقعی یا بالقوه، منابع نظامی، قابلیت های رزمی و آسیب پذیری آن، و همچنین صحنه عملیات نظامی. طبقه بندی. اطلاعات نظامی مدرن به دو دسته تقسیم می شود... دایره المعارف کولیر
موشک AIM 120 نوع موشک هوا به هوا ... ویکی پدیا
مطالعه زمین، مجموعه ای از روش ها برای تحقیق و نقشه برداری از هواپیما از پوسته جغرافیایی زمین، پدیده های ذاتی آن و اشیاء چشم انداز طبیعی و فرهنگی. آنها مشخصات فیزیکیمی تواند ثبت نام کند با......
ریاضیات تحقیق علمیدر زمینه ریاضیات در روسیه در قرن 18 شروع شد، زمانی که L. Euler، D. Bernoulli و دیگر دانشمندان اروپای غربی به عضویت آکادمی علوم سنت پترزبورگ درآمدند. طبق نقشه پیتر اول، دانشگاهیان خارجی هستند... ... دایره المعارف بزرگ شوروی
ویکتور فیلیپوویچ کراوچنکو تاریخ تولد: 5 اکتبر 1939 (1939 10 05) (73 ساله) محل تولد: خارکف، اوکراین، کشور اتحاد جماهیر شوروی ... ویکی پدیا
فناوری I Pulse رشتهای از فناوری است که روشها و ابزارهای فنی تولید (شکلدهی)، تبدیل و اندازهگیری تکانههای الکتریکی را مطالعه، توسعه و به کار میگیرد (به ضربه الکتریکی مراجعه کنید). در I. t. نیز... ... دایره المعارف بزرگ شوروی