Bei der Betrachtung des euklidischen Raums haben wir die Definition einer quadratischen Form eingeführt. Verwenden einer Matrix
Es wird ein Polynom zweiter Ordnung der Form konstruiert

Dies wird als quadratische Form bezeichnet, die durch eine quadratische Matrix erzeugt wird A.
Quadratische Formen stehen in engem Zusammenhang mit Flächen zweiter Ordnung im n-dimensionalen euklidischen Raum. Die allgemeine Gleichung solcher Flächen in unserem dreidimensionalen euklidischen Raum im kartesischen Koordinatensystem hat die Form:
Die oberste Zeile ist nichts anderes als die quadratische Form, wenn wir x 1 =x, x 2 =y, x 3 =z setzen:

 - symmetrische Matrix (a ij = a ji)
- symmetrische Matrix (a ij = a ji)
Nehmen wir der Allgemeinheit halber an, dass das Polynom
es gibt eine lineare Form. Dann ist die allgemeine Gleichung der Oberfläche die Summe einer quadratischen Form, einer linearen Form und einer Konstante.
Die Hauptaufgabe der Theorie der quadratischen Formen besteht darin, die quadratische Form durch eine nicht entartete lineare Transformation von Variablen, also einen Basiswechsel, auf die einfachste mögliche Form zu reduzieren.
Erinnern wir uns daran, dass wir bei der Untersuchung von Flächen zweiter Ordnung zu dem Schluss kamen, dass wir durch Drehen der Koordinatenachsen Terme loswerden können, die das Produkt xy, xz, yz oder x i x j (ij) enthalten. Darüber hinaus können Sie durch parallele Verschiebung der Koordinatenachsen die linearen Terme entfernen und letztendlich die allgemeine Oberflächengleichung auf die Form reduzieren:
Im Falle einer quadratischen Form reduzieren Sie diese auf die Form
nennt man die Reduktion einer quadratischen Form auf die kanonische Form.
Die Drehung der Koordinatenachsen ist nichts anderes als das Ersetzen einer Basis durch eine andere oder mit anderen Worten eine lineare Transformation.
Schreiben wir die quadratische Form in Matrixform. Stellen wir uns dazu Folgendes vor:
L(x,y,z) = x(a 11 x+a 12 y+a 13 z)+
Y(a 12 x+a 22 y+a 23 z)+
Z(a 13 x+a 23 y+a 33 z)
Lassen Sie uns eine Matrix einführen – eine Spalte
Dann  - wobei X T =(x,y,z)
- wobei X T =(x,y,z)
Matrixschreibweise quadratischer Form. Diese Formel gilt offensichtlich im allgemeinen Fall:
Die kanonische Form der quadratischen Form bedeutet offensichtlich, dass die Matrix A hat ein diagonales Aussehen:

Betrachten wir eine lineare Transformation X = SY, wobei S eine quadratische Matrix der Ordnung n ist und die Matrizen – Spalten X und Y:
Die Matrix S wird als lineare Transformationsmatrix bezeichnet. Beachten wir nebenbei, dass jede Matrix n-ter Ordnung mit einer gegebenen Basis einem bestimmten linearen Operator entspricht.
Die lineare Transformation X = SY ersetzt die Variablen x 1, x 2, x 3 durch neue Variablen y 1, y 2, y 3. Dann:
wobei B = S T A S
Die Aufgabe der Reduktion auf die kanonische Form besteht darin, eine Übergangsmatrix S zu finden, so dass Matrix B eine Diagonalform annimmt:
Also quadratische Form mit Matrix A Nach der linearen Transformation geht die Variable aus neuen Variablen mit Matrix in die quadratische Form über IN.
Wenden wir uns den linearen Operatoren zu. Jede Matrix A für eine gegebene Basis entspricht einem bestimmten linearen Operator A . Dieser Operator verfügt offensichtlich über ein bestimmtes System von Eigenwerten und Eigenvektoren. Darüber hinaus stellen wir fest, dass das System der Eigenvektoren im euklidischen Raum orthogonal sein wird. Wir haben in der vorherigen Vorlesung bewiesen, dass in der Eigenvektorbasis die Matrix eines linearen Operators eine Diagonalform hat. Die Formel (*) ist, wie wir uns erinnern, die Formel zur Transformation der Matrix eines linearen Operators beim Ändern der Basis. Nehmen wir an, dass die Eigenvektoren des linearen Operators sind A mit Matrix A - das sind die Vektoren y 1, y 2, ..., y n.
Und das bedeutet, dass, wenn die Eigenvektoren y 1, y 2, ..., y n zugrunde gelegt werden, die Matrix des linearen Operators in dieser Basis diagonal ist
oder B = S -1 A S, wobei S die Übergangsmatrix von der Anfangsbasis ist ( e) zur Basis ( j). Darüber hinaus ist die Matrix S auf einer Orthonormalbasis orthogonal.
Das. Um eine quadratische Form auf eine kanonische Form zu reduzieren, ist es notwendig, die Eigenwerte und Eigenvektoren des linearen Operators A zu finden, der in der ursprünglichen Basis die Matrix A hat, die die quadratische Form erzeugt, und zur Basis der Eigenvektoren gehen und konstruieren Sie die quadratische Form im neuen Koordinatensystem.
Schauen wir uns konkrete Beispiele an. Betrachten wir Linien zweiter Ordnung.
 oder
oder
Durch Drehen der Koordinatenachsen und anschließende Parallelverschiebung der Achsen lässt sich diese Gleichung auf die Form reduzieren (Variablen und Koeffizienten werden umbenannt in x 1 = x, x 2 = y):
1)
 wenn die Linie zentral ist, 1 0, 2 0
wenn die Linie zentral ist, 1 0, 2 0
2)
 wenn die Linie nicht zentral ist, d. h. eine von i = 0.
wenn die Linie nicht zentral ist, d. h. eine von i = 0.
Erinnern wir uns an die Arten von Linien zweiter Ordnung. Mittellinien:

Außermittige Linien:
5) x 2 = a 2 zwei parallele Linien;
6) x 2 = 0 zwei verschmelzende Linien;
7) y 2 = 2px Parabel.
Die Fälle 1), 2), 7) sind für uns von Interesse.
Schauen wir uns ein konkretes Beispiel an.
Bringen Sie die Geradengleichung in die kanonische Form und konstruieren Sie sie:
5x 2 + 4xy + 8y 2 - 32x - 56y + 80 = 0.
Die Matrix quadratischer Form ist  . Charakteristische Gleichung:
. Charakteristische Gleichung:
Seine Wurzeln:



Finden wir die Eigenvektoren:

Wenn 1 = 4:  u 1 = -2u 2 ; u 1 = 2c, u 2 = -c oder g 1 = c 1 (2 ich
– J).
u 1 = -2u 2 ; u 1 = 2c, u 2 = -c oder g 1 = c 1 (2 ich
– J).
Wenn 2 = 9:  2u 1 = u 2 ; u 1 = c, u 2 = 2c oder g 2 = c 2 ( ich+2J).
2u 1 = u 2 ; u 1 = c, u 2 = 2c oder g 2 = c 2 ( ich+2J).
Wir normalisieren diese Vektoren:

Erstellen wir eine lineare Transformationsmatrix oder eine Übergangsmatrix zur Basis g 1, g 2:
 - orthogonale Matrix!
- orthogonale Matrix!
Die Khaben die Form:
 oder
oder 
Ersetzen wir Linien in unsere Gleichung und erhalten:

Machen wir eine Parallelverschiebung der Koordinatenachsen. Wählen Sie dazu vollständige Quadrate von x 1 und y 1 aus:
 Bezeichnen wir
Bezeichnen wir  . Dann nimmt die Gleichung die Form an: 4x 2 2 + 9y 2 2 = 36 oder
. Dann nimmt die Gleichung die Form an: 4x 2 2 + 9y 2 2 = 36 oder 
Dies ist eine Ellipse mit den Halbachsen 3 und 2. Bestimmen wir den Drehwinkel der Koordinatenachsen und deren Verschiebung, um eine Ellipse im alten System zu erstellen.

P  scharf:
scharf:
Überprüfen Sie: bei x = 0: 8y 2 - 56y + 80 = 0 y 2 – 7y + 10 = 0. Daher y 1,2 = 5; 2
Wenn y = 0: 5x 2 – 32x + 80 = 0 Hier gibt es keine Wurzeln, d. h. es gibt keine Schnittpunkte mit der Achse X!
Eine quadratische Form heißt kanonisch, wenn alle d.h.
Jede quadratische Form kann durch lineare Transformationen auf die kanonische Form reduziert werden. In der Praxis werden üblicherweise die folgenden Methoden verwendet.
1. Orthogonale Raumtransformation:
Wo ![]() - Eigenwerte der Matrix A.
- Eigenwerte der Matrix A.
2. Lagrange-Methode – sequentielle Auswahl vollständiger Quadrate. Zum Beispiel, wenn

Dann wird ein ähnlicher Vorgang mit der quadratischen Form durchgeführt ![]() usw. Wenn in quadratischer Form alles aber ist
usw. Wenn in quadratischer Form alles aber ist ![]() dann kommt es nach der vorläufigen Umgestaltung auf das betrachtete Verfahren an. Wenn also zum Beispiel, dann gehen wir davon aus
dann kommt es nach der vorläufigen Umgestaltung auf das betrachtete Verfahren an. Wenn also zum Beispiel, dann gehen wir davon aus ![]()
![]()
![]()
3. Jacobi-Methode (für den Fall, dass alle Haupt-Minderjährigen ![]() quadratische Form sind von Null verschieden):
quadratische Form sind von Null verschieden):
Jede gerade Linie in der Ebene kann durch eine Gleichung erster Ordnung angegeben werden
Axt + Wu + C = 0,
Darüber hinaus sind die Konstanten A und B nicht gleichzeitig gleich Null. Diese Gleichung erster Ordnung heißt allgemeine Gleichung einer Geraden. Abhängig von den Werten der Konstanten A, B und C sind folgende Sonderfälle möglich:
C = 0, A ≠0, B ≠ 0 – die Gerade geht durch den Ursprung
A = 0, B ≠0, C ≠0 (By + C = 0) – Gerade parallel zur Ox-Achse
B = 0, A ≠0, C ≠ 0 (Ax + C = 0) – Gerade parallel zur Oy-Achse
B = C = 0, A ≠0 – die Gerade fällt mit der Oy-Achse zusammen
A = C = 0, B ≠0 – die Gerade fällt mit der Ox-Achse zusammen
Die Gleichung einer Geraden kann je nach gegebenen Anfangsbedingungen in verschiedenen Formen dargestellt werden.
Eine Gerade im Raum kann angegeben werden:
1) als Schnittlinie zweier Ebenen, d.h. Gleichungssystem:
A 1 x + B 1 y + C 1 z + D 1 = 0, A 2 x + B 2 y + C 2 z + D 2 = 0; (3.2)
2) durch seine beiden Punkte M 1 (x 1, y 1, z 1) und M 2 (x 2, y 2, z 2), dann ist die durch sie verlaufende Gerade durch die Gleichungen gegeben:
= ![]() ; (3.3)
; (3.3)
3) der zu ihm gehörende Punkt M 1 (x 1, y 1, z 1) und der Vektor A(m, n, p), kollinear dazu. Dann wird die Gerade durch die Gleichungen bestimmt:
![]() . (3.4)
. (3.4)
Die Gleichungen (3.4) werden aufgerufen kanonische Gleichungen der Linie.
Vektor A angerufen Richtungsvektor gerade.
Wir erhalten parametrische Gleichungen der Geraden, indem wir jede der Beziehungen (3.4) mit dem Parameter t gleichsetzen:
x = x 1 +mt, y = y 1 + nt, z = z 1 + rt. (3.5)
Lösungssystem (3.2) als lineares Gleichungssystem für Unbekannte X Und j, gelangen wir zu den Gleichungen der Geraden in Projektionen oder zu gegebene Gleichungen der Geraden:
x = mz + a, y = nz + b. (3.6)
Von den Gleichungen (3.6) können wir zu den kanonischen Gleichungen gehen und finden z aus jeder Gleichung und Gleichsetzen der resultierenden Werte:
![]() .
.
Von den allgemeinen Gleichungen (3.2) kann man auf andere Weise zu kanonischen Gleichungen gelangen, wenn man einen beliebigen Punkt auf dieser Geraden und seinen Richtungsvektor findet N= [N 1 , N 2 ], wo N 1 (A 1, B 1, C 1) und N 2 (A 2 , B 2 , C 2 ) – Normalenvektoren gegebener Ebenen. Wenn einer der Nenner m, n oder R in den Gleichungen (3.4) gleich Null ist, dann muss der Zähler des entsprechenden Bruchs gleich Null gesetzt werden, d.h. System
![]()
ist äquivalent zum System ![]() ; Eine solche Gerade verläuft senkrecht zur Ox-Achse.
; Eine solche Gerade verläuft senkrecht zur Ox-Achse.
System ![]() ist äquivalent zum System x = x 1, y = y 1; Die Gerade verläuft parallel zur Oz-Achse.
ist äquivalent zum System x = x 1, y = y 1; Die Gerade verläuft parallel zur Oz-Achse.
Jede Gleichung ersten Grades in Bezug auf Koordinaten x, y, z
Ax + By + Cz +D = 0 (3.1)
definiert eine Ebene und umgekehrt: Jede Ebene kann durch Gleichung (3.1) dargestellt werden, die aufgerufen wird Ebenengleichung.
Vektor N(A, B, C) orthogonal zur Ebene heißt Normalenvektor Flugzeug. In Gleichung (3.1) sind die Koeffizienten A, B, C gleichzeitig ungleich 0.
Sonderfälle der Gleichung (3.1):
1. D = 0, Ax+By+Cz = 0 – die Ebene geht durch den Ursprung.
2. C = 0, Ax+By+D = 0 – die Ebene ist parallel zur Oz-Achse.
3. C = D = 0, Ax + By = 0 – die Ebene geht durch die Oz-Achse.
4. B = C = 0, Ax + D = 0 – die Ebene ist parallel zur Oyz-Ebene.
Gleichungen der Koordinatenebenen: x = 0, y = 0, z = 0.
Eine gerade Linie kann zu einer Ebene gehören oder auch nicht. Es gehört zu einer Ebene, wenn mindestens zwei seiner Punkte auf der Ebene liegen.
Gehört eine Gerade nicht zur Ebene, kann sie parallel zu ihr verlaufen oder diese schneiden.
Eine Linie ist parallel zu einer Ebene, wenn sie parallel zu einer anderen Linie ist, die in dieser Ebene liegt.
Eine Gerade kann eine Ebene in verschiedenen Winkeln schneiden und insbesondere senkrecht dazu stehen.
Ein Punkt in Bezug auf die Ebene kann auf folgende Weise lokalisiert werden: dazu gehören oder nicht dazu gehören. Ein Punkt gehört zu einer Ebene, wenn er auf einer Geraden liegt, die in dieser Ebene liegt.
Im Raum können sich zwei Linien entweder schneiden, parallel sein oder gekreuzt werden.
Die Parallelität von Liniensegmenten bleibt in Projektionen erhalten.
Schneiden sich die Linien, dann liegen die Schnittpunkte ihrer gleichnamigen Projektionen auf derselben Verbindungslinie.
Sich kreuzende Linien gehören nicht zur gleichen Ebene, d.h. nicht schneiden oder parallel sein.
In der Zeichnung haben die Projektionen gleichnamiger Linien, einzeln betrachtet, die Eigenschaften von sich schneidenden oder parallelen Linien.
Ellipse. Eine Ellipse ist ein geometrischer Ort von Punkten, für den die Summe der Abstände zu zwei festen Punkten (Brennpunkten) für alle Punkte der Ellipse den gleichen konstanten Wert hat (dieser konstante Wert muss größer sein als der Abstand zwischen den Brennpunkten).
Die einfachste Gleichung einer Ellipse
Wo A- große Halbachse der Ellipse, B- kleine Halbachse der Ellipse. Wenn 2 C- Abstand zwischen den Brennpunkten, dann zwischen A, B Und C(Wenn A > B) Es besteht ein Zusammenhang
A 2 - B 2 = C 2 .
Die Exzentrizität einer Ellipse ist das Verhältnis des Abstands zwischen den Brennpunkten dieser Ellipse zur Länge ihrer Hauptachse
Die Ellipse hat Exzentrizität e < 1 (так как C < A), und seine Schwerpunkte liegen auf der Hauptachse.

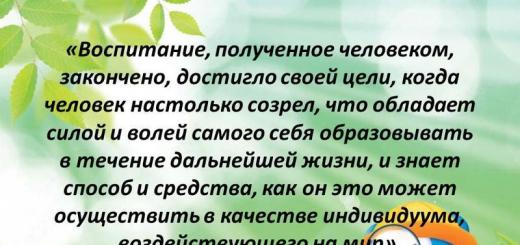
Gleichung der in der Abbildung gezeigten Hyperbel.
Optionen:
a, b – Halbachsen;
- Abstand zwischen den Brennpunkten,
- Exzentrizität;
- Asymptoten;
- Schulleiterinnen.
Das in der Bildmitte dargestellte Rechteck ist das Hauptrechteck; seine Diagonalen sind Asymptoten.
Bei dieser Methode werden nacheinander vollständige Quadrate in quadratischer Form ausgewählt.
Gegeben sei die quadratische Form
Denken Sie daran, aufgrund der Symmetrie der Matrix
![]() ,
,
Es gibt zwei mögliche Fälle:
1. Mindestens einer der Quadratkoeffizienten ist von Null verschieden. Ohne Verlust der Allgemeinheit gehen wir davon aus (dies kann immer durch entsprechende Umnummerierung der Variablen erreicht werden);
2. Alle Koeffizienten
aber es gibt einen von Null verschiedenen Koeffizienten (der Bestimmtheit halber sei es so).
Im ersten Fall Transformiere die quadratische Form wie folgt:
![]() ,
,
und alle anderen Begriffe werden mit bezeichnet.
ist eine quadratische Form von (n-1) Variablen.
Sie behandeln sie auf die gleiche Weise und so weiter.
beachte das
Zweiter Fall Substitution von Variablen
kommt auf das Erste an.
Beispiel 1: Reduzieren Sie die quadratische Form durch eine nicht entartete lineare Transformation auf die kanonische Form.
Lösung.
Sammeln wir alle Begriffe, die das Unbekannte enthalten  , und füge sie zu einem vollständigen Quadrat hinzu
, und füge sie zu einem vollständigen Quadrat hinzu
 .
.
(Als .)
 oder
oder 
 (3)
(3)
 oder
oder 

 (4)
(4)
und von unbekannt  bilden
bilden  wird das Formular annehmen. Als nächstes gehen wir davon aus
wird das Formular annehmen. Als nächstes gehen wir davon aus
 oder
oder 

und von unbekannt  bilden
bilden  wird die kanonische Form annehmen
wird die kanonische Form annehmen
Lassen Sie uns Gleichungen (3) in Bezug auf auflösen  :
:
 oder
oder 

Sequentielle Ausführung linearer Transformationen  Und
Und  , Wo
, Wo
 ,
,

hat eine Matrix

Lineare Transformation von Unbekannten
 ergibt eine quadratische Form
ergibt eine quadratische Form
 zur kanonischen Form (4). Variablen
zur kanonischen Form (4). Variablen  mit neuen Variablen verknüpft
mit neuen Variablen verknüpft  Beziehungen
Beziehungen

Die LU-Zerlegung haben wir im Workshop 2_1 kennengelernt
Erinnern wir uns an die Aussagen aus Workshop 2_1
Aussagen(siehe L.5, S. 176)

Dieses Skript soll die Rolle von LU in der Lagrange-Methode verstehen; Sie müssen im EDITOR-Notizblock mit der Taste F9 damit arbeiten.
Und in den unten angehängten Aufgaben ist es besser, eigene M-Funktionen zu erstellen, die helfen, Probleme der linearen Algebra zu berechnen und zu verstehen (im Rahmen dieser Arbeit).
Ax=X."*A*X % erhalten wir die quadratische Form
Ax=simple(Ax) % vereinfacht es
4*x1^2 - 4*x1*x2 + 4*x1*x3 + x2^2 - 3*x2*x3 + x3^2
% Finden Sie die LU-Zerlegung, ohne die Zeilen der Matrix A neu anzuordnen
% Beim Konvertieren einer Matrix in eine Staffelform
%Ohne Zeilenpermutationen erhalten wir eine Matrix aus M1 und U3
% U ergibt sich aus A U3=M1*A,
% mit dieser Matrix elementarer Transformationen
0.5000 1.0000 0
0.5000 0 1.0000
%wir erhalten U3=M1*A, wo
4.0000 -2.0000 2.0000
% von M1 ist es einfach, L1 durch Ändern der Vorzeichen zu erhalten
% in der ersten Spalte in allen Zeilen außer der ersten.
0.5000 1.0000 0
0.5000 0 1.0000
% L1 ist so
A_=L1*U % Dies ist die LU-Zerlegung, die wir brauchen
% Elemente auf der Hauptdiagonale U -
% sind Quadratkoeffizienten y i ^2
% in umgewandelter quadratischer Form
% In unserem Fall gibt es nur einen Koeffizienten
% bedeutet, dass es in den neuen Koordinaten nur noch 4y 1 2 zum Quadrat geben wird,
% für die verbleibenden 0y 2 2- und 0y 3 2-Koeffizienten sind gleich Null
%-Spalten der Matrix L1 sind die Zerlegung von Y durch X
% in der ersten Spalte sehen wir y1=x1-0,5x2+0,5x3
% für die Sekunde sehen wir y2=x2; gemäß dem dritten y3=x3.
% wenn L1 transponiert ist,
% das ist T=L1.“
% T – Übergangsmatrix von (X) nach (Y): Y=TX
0.5000 1.0000 0
1.0000 -0.5000 0.5000
% A2 – Matrix der transformierten quadratischen Form
% Beachten Sie U=A2*L1.“ und A=L1* A2*L1.“
4.0000 -2.0000 2.0000
|
1.0000 -0.5000 0.5000 |
% Wir haben also die Zerlegung A_=L1* A2*L1." oder A_=T."* A2*T erhalten
% zeigt die Änderung der Variablen
% y1=x1-0,5x2+0,5x3
% und Darstellung der quadratischen Form in neuen Koordinaten
A_=T."*A2*T % T=L1." Übergangsmatrix von (X) nach (Y): Y=TX
isequal(A,A_) % muss mit dem ursprünglichen A übereinstimmen
4.0000 -2.0000 2.0000
2.0000 1.0000 -1.5000
2.0000 -1.5000 1.0000
Q1=inv(T) % finde die Übergangsmatrix von (Y) nach (X)
% Finden wir die Transformation,
% quadratisch Ax=X."*A*X
% zum neuen Typ Ay=(Q1Y)."*A*Q1Y=Y." (Q1."*A*Q1)*Y=Y." (U)*Y
Ay =4*y1^2 - y2*y3
x1 - x2/2 + x3/2
% zweite Transformationsmatrix,
% was viel einfacher zu kompilieren ist.
4*z1^2 - z2^2 + z3^2
% R=Q1*Q2, X=R*Z
R=Q1*Q2 % nicht entartete lineare Transformation
% bringt die Operatormatrix in die kanonische Form.
det(R) % Determinante ist ungleich Null – die Transformation ist nicht entartet
4*z1^2 - z2^2 + z3^2 ok
4*z1^2 - z2^2 + z3^2

Lassen Sie uns einen Algorithmus zum Reduzieren von Quads formulieren Ratische Form zur kanonischen Form durch orthogonale Transformation:

Definition 10.4.Kanonische Sicht Die quadratische Form (10.1) heißt folgende Form: . (10.4)
Zeigen wir, dass in einer Basis von Eigenvektoren die quadratische Form (10.1) eine kanonische Form annimmt. Lassen
 - normalisierte Eigenvektoren, die Eigenwerten entsprechen λ 1 ,λ 2 ,λ 3 Matrizen (10.3) auf Orthonormalbasis. Dann wird die Übergangsmatrix von der alten zur neuen Basis die Matrix sein
- normalisierte Eigenvektoren, die Eigenwerten entsprechen λ 1 ,λ 2 ,λ 3 Matrizen (10.3) auf Orthonormalbasis. Dann wird die Übergangsmatrix von der alten zur neuen Basis die Matrix sein
 . In der neuen Basis die Matrix A wird die Diagonalform (9.7) annehmen (aufgrund der Eigenschaft der Eigenvektoren). So transformieren wir die Koordinaten mit den Formeln:
. In der neuen Basis die Matrix A wird die Diagonalform (9.7) annehmen (aufgrund der Eigenschaft der Eigenvektoren). So transformieren wir die Koordinaten mit den Formeln:
 ,
,
in der neuen Basis erhalten wir die kanonische Form einer quadratischen Form mit Koeffizienten gleich den Eigenwerten λ 1, λ 2, λ 3:
Anmerkung 1. Aus geometrischer Sicht ist die betrachtete Koordinatentransformation eine Drehung des Koordinatensystems, bei der die alten Koordinatenachsen mit den neuen kombiniert werden.
Bemerkung 2. Wenn irgendwelche Eigenwerte der Matrix (10.3) übereinstimmen, können wir zu jedem von ihnen einen Einheitsvektor orthogonal zu den entsprechenden orthonormalen Eigenvektoren hinzufügen und so eine Basis konstruieren, in der die quadratische Form die kanonische Form annimmt.
Bringen wir die quadratische Form in die kanonische Form
X² + 5 j² + z² + 2 xy + 6xz + 2yz.
Seine Matrix hat die Form. In dem in Vorlesung 9 diskutierten Beispiel werden die Eigenwerte und orthonormalen Eigenvektoren dieser Matrix gefunden:
![]()
![]() Erstellen wir aus diesen Vektoren eine Übergangsmatrix zur Basis:
Erstellen wir aus diesen Vektoren eine Übergangsmatrix zur Basis:
 (Die Reihenfolge der Vektoren wird geändert, sodass sie ein rechtshändiges Tripel bilden.) Lassen Sie uns die Koordinaten mit den Formeln transformieren:
(Die Reihenfolge der Vektoren wird geändert, sodass sie ein rechtshändiges Tripel bilden.) Lassen Sie uns die Koordinaten mit den Formeln transformieren:
 .
.

Die quadratische Form wird also auf die kanonische Form mit Koeffizienten reduziert, die den Eigenwerten der Matrix der quadratischen Form entsprechen.
Vorlesung 11.
Kurven zweiter Ordnung. Ellipse, Hyperbel und Parabel, ihre Eigenschaften und kanonische Gleichungen. Reduzieren einer Gleichung zweiter Ordnung auf die kanonische Form.
Definition 11.1.Kurven zweiter Ordnung auf einer Ebene nennt man die Schnittlinien eines Kreiskegels mit Ebenen, die nicht durch seinen Scheitelpunkt gehen.
Wenn eine solche Ebene alle Erzeugenden eines Hohlraums des Kegels schneidet, ergibt sich im Schnitt ein Schnitt Ellipse, am Schnittpunkt der Erzeugenden beider Hohlräume – Hyperbel, und wenn die Schnittebene parallel zu einem Generator verläuft, dann ist der Kegelschnitt gleich Parabel.
Kommentar. Alle Kurven zweiter Ordnung werden durch Gleichungen zweiten Grades in zwei Variablen angegeben.
Ellipse.
Definition 11.2.Ellipse ist die Menge der Punkte in der Ebene, für die die Summe der Abstände zu zwei festen Punkten beträgt F 1 und F Tricks ist ein konstanter Wert.
Kommentar. Wenn die Punkte übereinstimmen F 1 und F 2 Aus der Ellipse wird ein Kreis.
Lassen Sie uns die Gleichung der Ellipse herleiten, indem wir das kartesische System wählen
y M(x,y) Koordinaten, so dass die Achse Oh fiel mit einer geraden Linie zusammen F 1 F 2, Anfang
r 1 r 2 Koordinaten – mit der Mitte des Segments F 1 F 2. Lassen Sie die Länge davon
Segment ist gleich 2 Mit, dann im gewählten Koordinatensystem
F 1 O F 2 x F 1 (-C, 0), F 2 (C, 0). Lassen Sie den Punkt M(x, y) liegt auf der Ellipse und
die Summe der Entfernungen von ihm zu F 1 und F 2 ist gleich 2 A.
Dann R 1 + R 2 = 2A, Aber ,
Daher Einführung der Notation B² = A²- C² und nach Durchführung einfacher algebraischer Transformationen erhalten wir kanonische Ellipsengleichung: (11.1)
Definition 11.3.Exzentrizität Die Größe einer Ellipse wird als Größe bezeichnet e=s/a (11.2)
Definition 11.4.Schulleiterin D i Ellipse, die dem Fokus entspricht F i F i relativ zur Achse OU senkrecht zur Achse Oh auf Distanz a/e vom Ursprung.
Kommentar. Bei einer anderen Wahl des Koordinatensystems kann die Ellipse nicht durch die kanonische Gleichung (11.1), sondern durch eine Gleichung zweiten Grades anderer Art angegeben werden.
Ellipseneigenschaften:
1) Eine Ellipse hat zwei zueinander senkrechte Symmetrieachsen (die Hauptachsen der Ellipse) und ein Symmetriezentrum (das Zentrum der Ellipse). Wenn eine Ellipse durch eine kanonische Gleichung gegeben ist, dann sind ihre Hauptachsen die Koordinatenachsen und ihr Mittelpunkt ist der Ursprung. Da die Längen der durch den Schnittpunkt der Ellipse mit den Hauptachsen gebildeten Segmente gleich 2 sind A und 2 B (2A>2B), dann wird die durch die Brennpunkte verlaufende Hauptachse als Hauptachse der Ellipse und die zweite Hauptachse als Nebenachse bezeichnet.
2) Die gesamte Ellipse ist im Rechteck enthalten
3) Ellipsenexzentrizität e< 1.
Wirklich, ![]()
4) Die Leitlinien der Ellipse liegen außerhalb der Ellipse (da der Abstand vom Mittelpunkt der Ellipse zur Leitlinie beträgt a/e, A e<1, следовательно, a/e>a, und die gesamte Ellipse liegt in einem Rechteck)
5) Abstandsverhältnis r i vom Ellipsenpunkt zum Fokus F i auf die Entfernung d i von diesem Punkt bis zur Leitlinie, die dem Fokus entspricht, ist gleich der Exzentrizität der Ellipse.
Nachweisen.
Entfernungen vom Punkt M(x, y) bis zu den Brennpunkten der Ellipse lässt sich wie folgt darstellen:
Lassen Sie uns die Directrix-Gleichungen erstellen:
(D 1), (D 2). Dann ![]() Von hier r i / d i = e, was bewiesen werden musste.
Von hier r i / d i = e, was bewiesen werden musste.
Hyperbel.
Definition 11.5.Hyperbel ist die Menge der Punkte in der Ebene, für die der Modul der Abstandsdifferenz zu zwei festen Punkten beträgt F 1 und F 2 dieser Ebene, genannt Tricks ist ein konstanter Wert.
Leiten wir die kanonische Gleichung einer Hyperbel analog zur Ableitung der Ellipsengleichung unter Verwendung derselben Notation ab.
|r 1 - r 2 | = 2A, von wo aus Wenn wir bezeichnen B² = C² - A², von hier aus können Sie gelangen
- kanonische Hyperbelgleichung. (11.3)
Definition 11.6.Exzentrizität Eine Hyperbel wird als Größe bezeichnet e = c/a.
Definition 11.7.Schulleiterin D i Hyperbel, die dem Fokus entspricht F i, heißt eine Gerade, die in derselben Halbebene mit liegt F i relativ zur Achse OU senkrecht zur Achse Oh auf Distanz a/e vom Ursprung.
Eigenschaften einer Hyperbel:
1) Eine Hyperbel hat zwei Symmetrieachsen (die Hauptachsen der Hyperbel) und ein Symmetriezentrum (das Zentrum der Hyperbel). In diesem Fall schneidet eine dieser Achsen die Hyperbel an zwei Punkten, den sogenannten Eckpunkten der Hyperbel. Sie wird als reelle Achse der Hyperbel (Achse) bezeichnet Oh für die kanonische Wahl des Koordinatensystems). Die andere Achse hat keine gemeinsamen Punkte mit der Hyperbel und wird deren imaginäre Achse (in kanonischen Koordinaten die Achse) genannt OU). Auf beiden Seiten davon befinden sich der rechte und der linke Zweig der Hyperbel. Die Brennpunkte einer Hyperbel liegen auf ihrer realen Achse.
2) Die Zweige der Hyperbel haben zwei Asymptoten, die durch die Gleichungen bestimmt werden
3) Zusammen mit der Hyperbel (11.3) können wir die sogenannte konjugierte Hyperbel betrachten, die durch die kanonische Gleichung definiert ist
bei dem die reale und imaginäre Achse unter Beibehaltung der gleichen Asymptoten vertauscht werden.
4) Exzentrizität der Hyperbel e> 1.
5) Abstandsverhältnis r i vom Hyperbelpunkt zum Fokus F i auf die Entfernung d i von diesem Punkt bis zur Leitlinie, die dem Fokus entspricht, ist gleich der Exzentrizität der Hyperbel.
Der Beweis kann auf die gleiche Weise wie für die Ellipse durchgeführt werden.
Parabel.
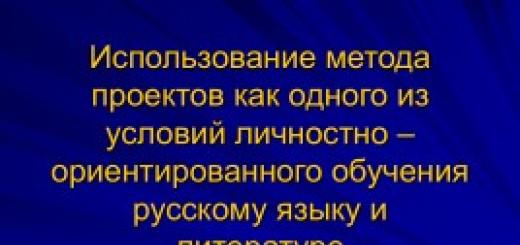
Definition 11.8.Parabel ist die Menge der Punkte auf der Ebene, für die der Abstand zu einem festen Punkt beträgt F diese Ebene ist gleich dem Abstand zu einer festen Geraden. Punkt F angerufen Fokus Parabeln, und die Gerade ist es Schulleiterin.
Um die Parabelgleichung abzuleiten, wählen wir die kartesische Gleichung
Koordinatensystem so, dass sein Ursprung in der Mitte liegt
D M(x,y) senkrecht FD, aus dem Fokus auf die Richtlinie weggelassen
r su, und die Koordinatenachsen befanden sich parallel und
senkrecht zum Direktor. Sei die Länge des Segments FD
D O F x ist gleich R. Dann von der Gleichheit r = d folgt dem
![]() weil das
weil das
![]() Mithilfe algebraischer Transformationen lässt sich diese Gleichung auf die Form reduzieren: j² = 2 px, (11.4)
Mithilfe algebraischer Transformationen lässt sich diese Gleichung auf die Form reduzieren: j² = 2 px, (11.4)
angerufen kanonische Parabelgleichung. Größe R angerufen Parameter Parabeln.
Eigenschaften einer Parabel:
1) Eine Parabel hat eine Symmetrieachse (Parabelachse). Der Punkt, an dem die Parabel die Achse schneidet, wird als Scheitelpunkt der Parabel bezeichnet. Wenn eine Parabel durch eine kanonische Gleichung gegeben ist, dann ist ihre Achse die Achse Oh, und der Scheitelpunkt ist der Koordinatenursprung.
2) Die gesamte Parabel liegt in der rechten Halbebene der Ebene Oh.
Kommentar. Mithilfe der Eigenschaften der Leitlinien einer Ellipse und einer Hyperbel sowie der Definition einer Parabel können wir die folgende Aussage beweisen:
Die Menge der Punkte auf der Ebene, für die die Beziehung gilt e der Abstand zu einem festen Punkt zum Abstand zu einer geraden Linie ist ein konstanter Wert, es ist eine Ellipse (mit e<1), гиперболу (при e>1) oder Parabel (mit e=1).
Verwandte Informationen.