Когато разглеждаме евклидовото пространство, въведохме определението за квадратична форма. Използване на някаква матрица
се изгражда полином от втори ред от вида

което се нарича квадратна форма, генерирана от квадратна матрица А.
Квадратните форми са тясно свързани с повърхности от втори ред в n-мерното евклидово пространство. Общото уравнение на такива повърхности в нашето триизмерно евклидово пространство в декартовата координатна система има формата:
Горният ред не е нищо повече от квадратната форма, ако поставим x 1 =x, x 2 =y, x 3 =z:

 - симетрична матрица (a ij = a ji)
- симетрична матрица (a ij = a ji)
Нека приемем за общо, че полиномът
има линейна форма. Тогава общото уравнение на повърхността е сумата от квадратна форма, линейна форма и някаква константа.
Основната задача на теорията на квадратичните форми е да намали квадратичната форма до най-простата възможна форма, използвайки неизродена линейна трансформация на променливи или, с други думи, промяна на базиса.
Нека си припомним, че когато изучавахме повърхности от втори ред, стигнахме до извода, че чрез завъртане на координатните оси можем да се отървем от членовете, съдържащи продукта xy, xz, yz или x i x j (ij). Освен това, чрез паралелно преместване на координатните оси, можете да се отървете от линейните членове и в крайна сметка да намалите общото уравнение на повърхността до формата:
В случай на квадратна форма, намаляването й до формата
се нарича редуциране на квадратна форма до канонична форма.
Завъртането на координатните оси не е нищо повече от замяна на една основа с друга или, с други думи, линейна трансформация.
Нека запишем квадратната форма в матрична форма. За да направите това, нека си го представим по следния начин:
L(x,y,z) = x(a 11 x+a 12 y+a 13 z)+
Y(a 12 x+a 22 y+a 23 z)+
Z(a 13 x+a 23 y+a 33 z)
Нека въведем матрица - колона
Тогава  - където X T = (x,y,z)
- където X T = (x,y,z)
Матрична нотация на квадратична форма. Тази формула очевидно е валидна в общия случай:
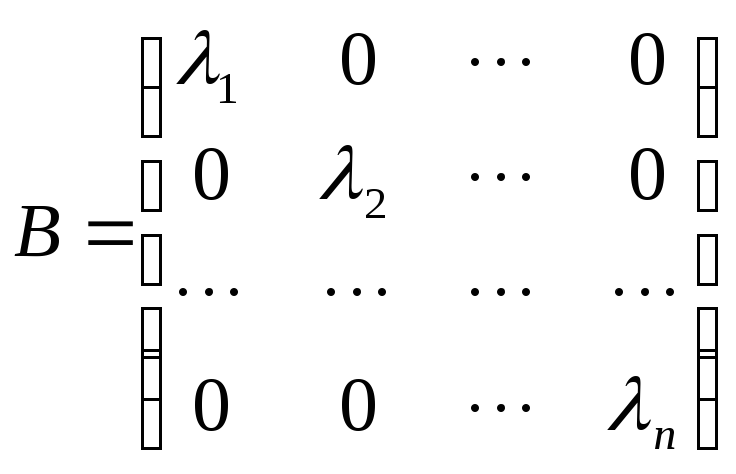
Каноничната форма на квадратичната форма очевидно означава, че матрицата Аима диагонален вид:

Нека разгледаме някаква линейна трансформация X = SY, където S е квадратна матрица от ред n, а матриците - колони X и Y са:
Матрицата S се нарича матрица на линейно преобразуване. Нека да отбележим между другото, че всяка матрица от n-ти ред с даден базис съответства на определен линеен оператор.
Линейната трансформация X = SY заменя променливите x 1, x 2, x 3 с нови променливи y 1, y 2, y 3. Тогава:
където B = S T A S
Задачата за редуциране до канонична форма се свежда до намиране на преходна матрица S, така че матрица B да приеме диагонална форма:
И така, квадратна форма с матрица Аслед линейна трансформация на променливи преминава в квадратична форма от нови променливи с матрица IN.
Нека се обърнем към линейните оператори. Всяка матрица А за даден базис отговаря на определен линеен оператор А . Този оператор очевидно има определена система от собствени стойности и собствени вектори. Освен това отбелязваме, че в евклидовото пространство системата от собствени вектори ще бъде ортогонална. В предишната лекция доказахме, че в базиса на собствения вектор матрицата на линеен оператор има диагонална форма. Формула (*), както си спомняме, е формулата за трансформиране на матрицата на линеен оператор при промяна на основата. Нека приемем, че собствените вектори на линейния оператор А с матрица A - това са векторите y 1, y 2, ..., y n.
И това означава, че ако собствените вектори y 1, y 2, ..., y n се вземат за основа, тогава матрицата на линейния оператор в тази база ще бъде диагонална
или B = S -1 A S, където S е матрицата на прехода от началната база ( д) към основата ( г). Освен това, в ортонормална база, матрицата S ще бъде ортогонална.
Че. за да се намали квадратична форма до канонична форма, е необходимо да се намерят собствените стойности и собствените вектори на линейния оператор A, който има в първоначалната основа матрицата A, която генерира квадратичната форма, да отиде в основата на собствените вектори и конструирайте квадратната форма в новата координатна система.
Нека разгледаме конкретни примери. Нека разгледаме линиите от втори ред.
 или
или
Чрез завъртане на координатните оси и последваща паралелна транслация на осите, това уравнение може да се редуцира до формата (променливите и коефициентите се обозначават отново x 1 = x, x 2 = y):
1)
 ако линията е централна, 1 0, 2 0
ако линията е централна, 1 0, 2 0
2)
 ако линията е нецентрална, т.е. едно от i = 0.
ако линията е нецентрална, т.е. едно от i = 0.
Нека си припомним видовете линии от втори ред. Централни линии:

Линии извън центъра:
5) x 2 = a 2 две успоредни прави;
6) x 2 = 0 две сливащи се линии;
7) y 2 = 2px парабола.
Случаи 1), 2), 7) представляват интерес за нас.
Нека да разгледаме конкретен пример.
Приведете уравнението на правата в канонична форма и го конструирайте:
5x 2 + 4xy + 8y 2 - 32x - 56y + 80 = 0.
Матрицата на квадратна форма е  . Характеристично уравнение:
. Характеристично уравнение:
Корените му:



Нека намерим собствените вектори:

Когато 1 = 4:  u 1 = -2u 2; u 1 = 2c, u 2 = -c или g 1 = c 1 (2 аз
– й).
u 1 = -2u 2; u 1 = 2c, u 2 = -c или g 1 = c 1 (2 аз
– й).
Когато 2 = 9:  2u 1 = u 2; u 1 = c, u 2 = 2c или g 2 = c 2 ( аз+2й).
2u 1 = u 2; u 1 = c, u 2 = 2c или g 2 = c 2 ( аз+2й).
Нормализираме тези вектори:

Нека създадем матрица за линейна трансформация или матрица за преход към основата g 1, g 2:
 - ортогонална матрица!
- ортогонална матрица!
Формулите за трансформация на координатите имат формата:
 или
или 
Нека заместим редовете в нашето уравнение и ще получим:

Нека направим успоредна транслация на координатните оси. За да направите това, изберете пълни квадрати от x 1 и y 1:
 Нека обозначим
Нека обозначим  . Тогава уравнението ще приеме формата: 4x 2 2 + 9y 2 2 = 36 или
. Тогава уравнението ще приеме формата: 4x 2 2 + 9y 2 2 = 36 или 
Това е елипса с полуоси 3 и 2. Да определим ъгъла на завъртане на координатните оси и тяхното изместване, за да изградим елипса в старата система.

П  остър:
остър:
Проверка: при x = 0: 8y 2 - 56y + 80 = 0 y 2 – 7y + 10 = 0. Следователно y 1,2 = 5; 2
Когато y = 0: 5x 2 – 32x + 80 = 0 Тук няма корени, т.е. няма пресечни точки с оста х!
Квадратна форма се нарича канонична, ако всички т.е.
Всяка квадратна форма може да бъде редуцирана до канонична форма с помощта на линейни трансформации. На практика обикновено се използват следните методи.
1. Ортогонална трансформация на пространството:
Където ![]() - собствени стойности на матрицата А.
- собствени стойности на матрицата А.
2. Метод на Лагранж - последователен избор на пълни квадрати. Например ако

След това се извършва подобна процедура с квадратната форма ![]() и т.н. Ако в квадратна форма всичко е но
и т.н. Ако в квадратна форма всичко е но ![]() тогава след предварителна трансформация въпросът се свежда до разглежданата процедура. Така че, ако, например, тогава предполагаме
тогава след предварителна трансформация въпросът се свежда до разглежданата процедура. Така че, ако, например, тогава предполагаме ![]()
![]()
![]()
3. Метод на Якоби (в случай, когато всички големи непълнолетни ![]() квадратна форма са различни от нула):
квадратна форма са различни от нула):
Всяка права линия в равнината може да бъде определена чрез уравнение от първи ред
Ax + Wu + C = 0,
Освен това константите A и B не са равни на нула едновременно. Това уравнение от първи ред се нарича общо уравнение на права линия.В зависимост от стойностите на константите A, B и C са възможни следните специални случаи:
C = 0, A ≠0, B ≠ 0 – правата минава през началото
A = 0, B ≠0, C ≠0 (By + C = 0) - права линия, успоредна на оста Ox
B = 0, A ≠0, C ≠ 0 (Ax + C = 0) – права линия, успоредна на оста Oy
B = C = 0, A ≠0 – правата съвпада с оста Oy
A = C = 0, B ≠0 – правата съвпада с оста Ox
Уравнението на права линия може да бъде представено в различни форми в зависимост от дадени начални условия.
Може да се посочи права линия в пространството:
1) като линия на пресичане на две равнини, т.е. система от уравнения:
A 1 x + B 1 y + C 1 z + D 1 = 0, A 2 x + B 2 y + C 2 z + D 2 = 0; (3.2)
2) чрез двете си точки M 1 (x 1, y 1, z 1) и M 2 (x 2, y 2, z 2), тогава правата, минаваща през тях, се дава от уравненията:
= ![]() ; (3.3)
; (3.3)
3) точката M 1 (x 1, y 1, z 1), принадлежаща на нея, и векторът а(m, n, p), колинеарни на него. Тогава правата линия се определя от уравненията:
![]() . (3.4)
. (3.4)
Уравненията (3.4) се наричат канонични уравнения на правата.
вектор аНаречен вектор на посоката права.
Получаваме параметрични уравнения на правата, като приравняваме всяко от отношенията (3.4) към параметъра t:
x = x 1 +mt, y = y 1 + nt, z = z 1 + rt. (3,5)
Решаване на система (3.2) като система от линейни уравнения за неизвестни хИ г, стигаме до уравненията на правата в проекцииили да дадени уравнения на правата:
x = mz + a, y = nz + b. (3.6)
От уравнения (3.6) можем да преминем към каноничните уравнения, намирайки zот всяко уравнение и приравняване на получените стойности:
![]() .
.
От общите уравнения (3.2) можете да преминете към каноничните по друг начин, ако намерите всяка точка на тази права и нейния насочващ вектор н= [н 1 , н 2], където н 1 (A 1, B 1, C 1) и н 2 (A 2 , B 2 , C 2 ) - нормални вектори на дадени равнини. Ако един от знаменателите м, нили Рв уравнения (3.4) се окаже равен на нула, тогава числителят на съответната дроб трябва да се постави равен на нула, т.е. система
![]()
е еквивалентен на системата ![]() ; такава права линия е перпендикулярна на оста Ox.
; такава права линия е перпендикулярна на оста Ox.
Система ![]() е еквивалентна на системата x = x 1, y = y 1; правата е успоредна на оста Oz.
е еквивалентна на системата x = x 1, y = y 1; правата е успоредна на оста Oz.
Всяко уравнение от първа степен по координати x, y, z
Ax + By + Cz + D = 0 (3.1)
дефинира равнина и обратно: всяка равнина може да бъде представена чрез уравнение (3.1), което се нарича уравнение на равнината.
вектор н(A, B, C) ортогонална на равнината се нарича нормален векторсамолет. В уравнение (3.1) коефициентите A, B, C не са равни на 0 едновременно.
Специални случаи на уравнение (3.1):
1. D = 0, Ax+By+Cz = 0 - равнината минава през началото.
2. C = 0, Ax+By+D = 0 - равнината е успоредна на оста Oz.
3. C = D = 0, Ax + By = 0 - равнината минава през оста Oz.
4. B = C = 0, Ax + D = 0 - равнината е успоредна на равнината Oyz.
Уравнения на координатни равнини: x = 0, y = 0, z = 0.
Една права линия може или не може да принадлежи на равнина. То принадлежи на равнина, ако поне две от точките му лежат на равнината.
Ако една права не принадлежи на равнината, тя може да бъде успоредна на нея или да я пресича.
Една права е успоредна на равнина, ако е успоредна на друга права, лежаща в тази равнина.
Една права линия може да пресича равнина под различни ъгли и по-специално да бъде перпендикулярна на нея.
Една точка спрямо равнината може да бъде разположена по следния начин: да й принадлежи или да не й принадлежи. Една точка принадлежи на равнина, ако се намира на права линия, разположена в тази равнина.
В пространството две линии могат да се пресичат, да са успоредни или да се пресичат.
Паралелността на отсечките се запазва в проекциите.
Ако линиите се пресичат, то точките на пресичане на техните проекции със същото име са на една и съща свързваща линия.
Пресечните прави не принадлежат на една и съща равнина, т.е. не се пресичат или успоредни.
на чертежа проекциите на едноименни линии, взети поотделно, имат характеристиките на пресичащи се или успоредни прави.
Елипса.Елипса е геометрично място на точки, за които сумата от разстоянията до две фиксирани точки (фокуси) е една и съща постоянна стойност за всички точки на елипсата (тази постоянна стойност трябва да е по-голяма от разстоянието между фокусите).
Най-простото уравнение на елипса
Където а- голяма полуос на елипсата, b- малка полуос на елипсата. Ако 2 ° С- разстояние между фокусите, след това между а, bИ ° С(Ако а > b) има връзка
а 2 - b 2 = ° С 2 .
Ексцентричността на елипса е съотношението на разстоянието между фокусите на тази елипса към дължината на нейната голяма ос
Елипсата има ексцентричност д < 1 (так как ° С < а), а неговите фокуси лежат на голямата ос.

Уравнение на хиперболата, показана на фигурата.
Настроики:
a, b – полуоси;
- разстояние между фокусите,
- ексцентричност;
- асимптоти;
- директорки.
Правоъгълникът, показан в центъра на картината, е основният правоъгълник; неговите диагонали са асимптоти.
Този метод се състои в последователно избиране на пълни квадрати в квадратна форма.
Нека е дадена квадратичната форма
Припомнете си, че поради симетрията на матрицата
![]() ,
,
Има два възможни случая:
1. Поне един от коефициентите на квадратите е различен от нула. Без загуба на общоприетост ще приемем (това винаги може да се постигне чрез подходящо преномериране на променливите);
2. Всички коефициенти
но има коефициент различен от нула (нека е за по-ясно).
В първия случайтрансформирайте квадратната форма, както следва:
![]() ,
,
и всички останали термини са обозначени с.
е квадратна форма на (n-1) променливи.
Те се отнасят с нея по същия начин и т.н.
забележи това
Втори случайзаместване на променливи
се свежда до първото.
Пример 1: Редуциране на квадратичната форма до канонична форма чрез неизродена линейна трансформация.
Решение.
Нека съберем всички термини, съдържащи неизвестното  и ги добавете към пълен квадрат
и ги добавете към пълен квадрат
 .
.
(Защото .)
 или
или 
 (3)
(3)
 или
или 

 (4)
(4)
и от неизвестен  форма
форма  ще приеме формата. След това предполагаме
ще приеме формата. След това предполагаме
 или
или 

и от неизвестен  форма
форма  ще приеме каноничен вид
ще приеме каноничен вид
Нека разрешим равенства (3) по отношение на  :
:
 или
или 

Последователно изпълнение на линейни трансформации  И
И  , Където
, Където
 ,
,

има матрица

Линейна трансформация на неизвестни
 дава квадратна форма
дава квадратна форма
 към каноничната форма (4). Променливи
към каноничната форма (4). Променливи  свързани с нови променливи
свързани с нови променливи  отношения
отношения

Запознахме се с декомпозицията на LU в работилница 2_1
Нека си припомним твърденията от семинар 2_1
Изявления(виж L.5, стр. 176)

Този скрипт е предназначен да разбере ролята на LU в метода на Lagrange;
И в задачите, приложени по-долу, е по-добре да създадете свои собствени M-функции, които помагат за изчисляване и разбиране на проблемите с линейна алгебра (в рамките на тази работа)
Ax=X."*A*X % получаваме квадратната форма
Ax=simple(Ax) % опростете го
4*x1^2 - 4*x1*x2 + 4*x1*x3 + x2^2 - 3*x2*x3 + x3^2
% намерете разлагането на LU без пренареждане на редовете на матрицата A
% При преобразуване на матрица в ешелонна форма
% без пермутации на редове, получаваме матрица от M1 и U3
% U се получава от A U3=M1*A,
% с тази матрица от елементарни трансформации
0.5000 1.0000 0
0.5000 0 1.0000
% получаваме U3=M1*A, където
4.0000 -2.0000 2.0000
% от M1 лесно се получава L1 чрез смяна на знаците
% в първата колона във всички редове с изключение на първия.
0.5000 1.0000 0
0.5000 0 1.0000
% L1 е такъв, че
A_=L1*U % това е LU декомпозицията, от която се нуждаем
% Елементи на главния диагонал U -
% са коефициенти на квадрати y i ^2
% в преобразувана квадратна форма
% в нашия случай има само един коефициент
% означава, че в новите координати ще има само 4y 1 2 на квадрат,
% за останалите коефициенти 0y 2 2 и 0y 3 2 са равни на нула
% колони на матрица L1 са разлагането на Y по X
% в първата колона виждаме y1=x1-0.5x2+0.5x3
% за второто виждаме y2=x2; според третата y3=x3.
%, ако L1 е транспониран,
%, което е T=L1."
% T - матрица на прехода от (X) към (Y): Y=TX
0.5000 1.0000 0
1.0000 -0.5000 0.5000
% A2 – матрица на трансформирана квадратна форма
% Забележка U=A2*L1." и A=L1* A2*L1."
4.0000 -2.0000 2.0000
|
1.0000 -0.5000 0.5000 |
% И така, получихме разлагането A_=L1* A2*L1." или A_=T."* A2*T
%, показващ промяната на променливите
% y1=x1-0.5x2+0.5x3
% и представяне на квадратна форма в нови координати
A_=T."*A2*T % T=L1." преходна матрица от (X) към (Y): Y=TX
isequal(A,A_) % трябва да съответства на оригиналния A
4.0000 -2.0000 2.0000
2.0000 1.0000 -1.5000
2.0000 -1.5000 1.0000
Q1=inv(T) % намерете матрицата на прехода от (Y) към (X)
% Да намерим трансформацията,
% квадратично Ax=X."*A*X
% към новия тип Ay=(Q1Y)."*A*Q1Y=Y." (Q1."*A*Q1)*Y=Y." (U)*Y
Ay =4*y1^2 - y2*y3
x1 - x2/2 + x3/2
% втора трансформационна матрица,
%, което е много по-лесно за компилиране.
4*z1^2 - z2^2 + z3^2
% R=Q1*Q2, X=R*Z
R=Q1*Q2 % неизродена линейна трансформация
% привеждане на операторната матрица в канонична форма.
det(R) % детерминанта не е равна на нула - трансформацията е неизродена
4*z1^2 - z2^2 + z3^2 добре
4*z1^2 - z2^2 + z3^2

Нека формулираме алгоритъм за намаляване на квадратите ратическа форма към канонична форма чрез ортогонална трансформация:

Определение 10.4.Каноничен изгледквадратна форма (10.1) се нарича следната форма: . (10.4)
Нека покажем, че в базис от собствени вектори, квадратичната форма (10.1) приема канонична форма. Позволявам
 - нормализирани собствени вектори, съответстващи на собствени стойности λ 1 , λ 2 , λ 3матрици (10.3) в ортонормална база. Тогава матрицата на прехода от старата база към новата ще бъде матрицата
- нормализирани собствени вектори, съответстващи на собствени стойности λ 1 , λ 2 , λ 3матрици (10.3) в ортонормална база. Тогава матрицата на прехода от старата база към новата ще бъде матрицата
 . В новата основа матрицата Аще приеме диагоналната форма (9.7) (по свойството на собствените вектори). По този начин, трансформиране на координатите с помощта на формулите:
. В новата основа матрицата Аще приеме диагоналната форма (9.7) (по свойството на собствените вектори). По този начин, трансформиране на координатите с помощта на формулите:
 ,
,
в новата база получаваме каноничната форма на квадратична форма с коефициенти, равни на собствените стойности λ 1, λ 2, λ 3:
Забележка 1. От геометрична гледна точка разглежданата координатна трансформация е завъртане на координатната система, комбинирайки старите координатни оси с новите.
Забележка 2. Ако някои собствени стойности на матрицата (10.3) съвпадат, можем да добавим единичен вектор, ортогонален към всеки от тях към съответните ортонормални собствени вектори, и по този начин да изградим база, в която квадратичната форма приема канонична форма.
Нека приведем квадратичната форма в канонична форма
х² + 5 г² + z² + 2 xy + 6xz + 2yz.
Нейната матрица има формата В примера, обсъден в Лекция 9, се намират собствените стойности и ортонормалните собствени вектори на тази матрица:
![]()
![]() Нека създадем преходна матрица към основата от тези вектори:
Нека създадем преходна матрица към основата от тези вектори:
 (редът на векторите се променя така, че да образуват дясна тройка). Нека трансформираме координатите с помощта на формулите:
(редът на векторите се променя така, че да образуват дясна тройка). Нека трансформираме координатите с помощта на формулите:
 .
.

И така, квадратичната форма се редуцира до канонична форма с коефициенти, равни на собствените стойности на матрицата на квадратичната форма.
Лекция 11.
Криви от втори ред. Елипса, хипербола и парабола, техните свойства и канонични уравнения. Редуциране на уравнение от втори ред до канонична форма.
Определение 11.1.Криви от втори редна равнина се наричат линиите на пресичане на кръгъл конус с равнини, които не минават през неговия връх.
Ако такава равнина пресича всички генератори на една кухина на конуса, тогава в секцията се оказва елипса, в пресечната точка на образуващите на двете кухини – хипербола, и ако сечащата равнина е успоредна на която и да е образуваща, тогава сечението на конуса е парабола.
Коментирайте. Всички криви от втори ред са определени от уравнения от втора степен в две променливи.
Елипса.
Определение 11.2.Елипсае множеството от точки в равнината, за които е сумата от разстоянията до две фиксирани точки Е 1 и Е трикове, е постоянна стойност.
Коментирайте. Когато точките съвпадат Е 1 и Е 2 елипсата се превръща в кръг.
Нека изведем уравнението на елипсата, като изберем декартовата система
y M(x,y)координати, така че оста осъвпадна с права линия Е 1 Е 2, начало
r 1 r 2 координати – със средата на отсечката Е 1 Е 2. Нека дължината на това
отсечката е равна на 2 с, след това в избраната координатна система
F 1 O F 2 x Е 1 (-° С, 0), Е 2 (° С, 0). Нека точката M(x, y) лежи на елипсата и
сумата от разстоянията от него до Е 1 и Е 2 е равно на 2 А.
Тогава r 1 + r 2 = 2а, Но ,
следователно, въвеждане на нотацията b² = а²- ° С² и след извършване на прости алгебрични трансформации получаваме канонично уравнение на елипса: (11.1)
Определение 11.3.Ексцентричностна елипса се нарича величина e=s/a (11.2)
Определение 11.4.Директорка D iелипса, съответстваща на фокуса F i F iспрямо оста OUперпендикулярно на оста она разстояние а/еот произхода.
Коментирайте. При различен избор на координатна система елипсата може да бъде определена не от каноничното уравнение (11.1), а от уравнение от втора степен от различен тип.
Свойства на елипса:
1) Елипса има две взаимно перпендикулярни оси на симетрия (главните оси на елипсата) и център на симетрия (центъра на елипсата). Ако една елипса е дадена с канонично уравнение, тогава нейните главни оси са координатните оси, а нейният център е началото. Тъй като дължините на сегментите, образувани от пресечната точка на елипсата с главните оси, са равни на 2 Аи 2 b (2а>2b), тогава главната ос, минаваща през фокусите, се нарича голяма ос на елипсата, а втората главна ос се нарича малка ос.
2) Цялата елипса се съдържа в правоъгълника
3) Ексцентричност на елипса д< 1.
Наистина ли, ![]()
4) Директрисите на елипсата са разположени извън елипсата (тъй като разстоянието от центъра на елипсата до директрисата е а/е, А д<1, следовательно, а/е>а, а цялата елипса лежи в правоъгълник)
5) Коефициент на разстояние r iот точка на елипса до фокус F iкъм разстоянието d iот тази точка до директрисата, съответстваща на фокуса, е равна на ексцентрицитета на елипсата.
Доказателство.
Разстояния от точка M(x, y)до фокусите на елипсата могат да бъдат представени, както следва:
Нека създадем уравненията на директрисата:
(д 1), (д 2). Тогава ![]() Оттук r i / d i = e, което трябваше да се докаже.
Оттук r i / d i = e, което трябваше да се докаже.
Хипербола.
Определение 11.5.Хиперболае множеството от точки в равнината, за които е модулът на разликата в разстоянията до две фиксирани точки Е 1 и Е 2 от този самолет, т.нар трикове, е постоянна стойност.
Нека изведем каноничното уравнение на хипербола по аналогия с извеждането на уравнението на елипса, използвайки същата нотация.
|r 1 - r 2 | = 2а, откъдето Ако означим b² = ° С² - а², от тук можете да получите
- канонично уравнение на хипербола. (11.3)
Определение 11.6.Ексцентричностхипербола се нарича количество e = c/a.
Определение 11.7.Директорка D iхипербола, съответстваща на фокуса F i, се нарича права линия, разположена в една и съща полуравнина с F iспрямо оста OUперпендикулярно на оста она разстояние а/еот произхода.
Свойства на хипербола:
1) Хиперболата има две оси на симетрия (главните оси на хиперболата) и център на симетрия (центърът на хиперболата). В този случай една от тези оси се пресича с хиперболата в две точки, наречени върхове на хиперболата. Нарича се реалната ос на хиперболата (ос оза каноничния избор на координатната система). Другата ос няма общи точки с хиперболата и се нарича нейна имагинерна ос (в канонични координати - оста OU). От двете му страни са дясното и лявото разклонение на хиперболата. Фокусите на хипербола са разположени на реалната й ос.
2) Клоновете на хиперболата имат две асимптоти, определени от уравненията
3) Заедно с хипербола (11.3), можем да разгледаме така наречената спрегната хипербола, дефинирана от каноничното уравнение
за които реалната и имагинерната ос се разменят, като се запазват същите асимптоти.
4) Ексцентричност на хиперболата д> 1.
5) Коефициент на разстояние r iот точка на хипербола до фокус F iкъм разстоянието d iот тази точка до директрисата, съответстваща на фокуса, е равна на ексцентрицитета на хиперболата.
Доказателството може да се извърши по същия начин, както при елипсата.
Парабола.
Определение 11.8.Параболае множеството точки на равнината, за които разстоянието до някаква фиксирана точка е Етази равнина е равна на разстоянието до някаква фиксирана права линия. Точка ЕНаречен фокуспараболи, а правата е негова директорка.
За да изведем уравнението на параболата, избираме декартово
координатна система, така че началото й да е средата
D M(x,y) перпендикуляр FD, пропуснати от фокуса върху директивата
r su, а координатните оси бяха разположени успоредно и
перпендикулярно на директора. Нека дължината на сегмента FD
D O F x е равно на Р. След това от равенството r = dследва това
![]() тъй като
тъй като
![]() Използвайки алгебрични трансформации, това уравнение може да се сведе до формата: г² = 2 px, (11.4)
Използвайки алгебрични трансформации, това уравнение може да се сведе до формата: г² = 2 px, (11.4)
Наречен уравнение на канонична парабола. величина РНаречен параметърпараболи.
Свойства на парабола:
1) Параболата има ос на симетрия (ос на парабола). Точката, в която параболата пресича оста, се нарича връх на параболата. Ако една парабола е дадена от канонично уравнение, тогава нейната ос е оста оа върхът е началото на координатите.
2) Цялата парабола се намира в дясната полуравнина на равнината ох
Коментирайте. Използвайки свойствата на директрисите на елипса и хипербола и дефиницията на парабола, можем да докажем следното твърдение:
Множеството от точки на равнината, за които релацията дразстоянието до някаква фиксирана точка до разстоянието до някаква права линия е постоянна стойност, то е елипса (с д<1), гиперболу (при д>1) или парабола (със д=1).
Свързана информация.